Изобретение относится к станкостроению и может найти применение, в частности в манипуляторах, снабженных предохранительными приспособлениями.
Целью изобретения является повышение надежности за счет исключения самопроизвольного опускания захвата.
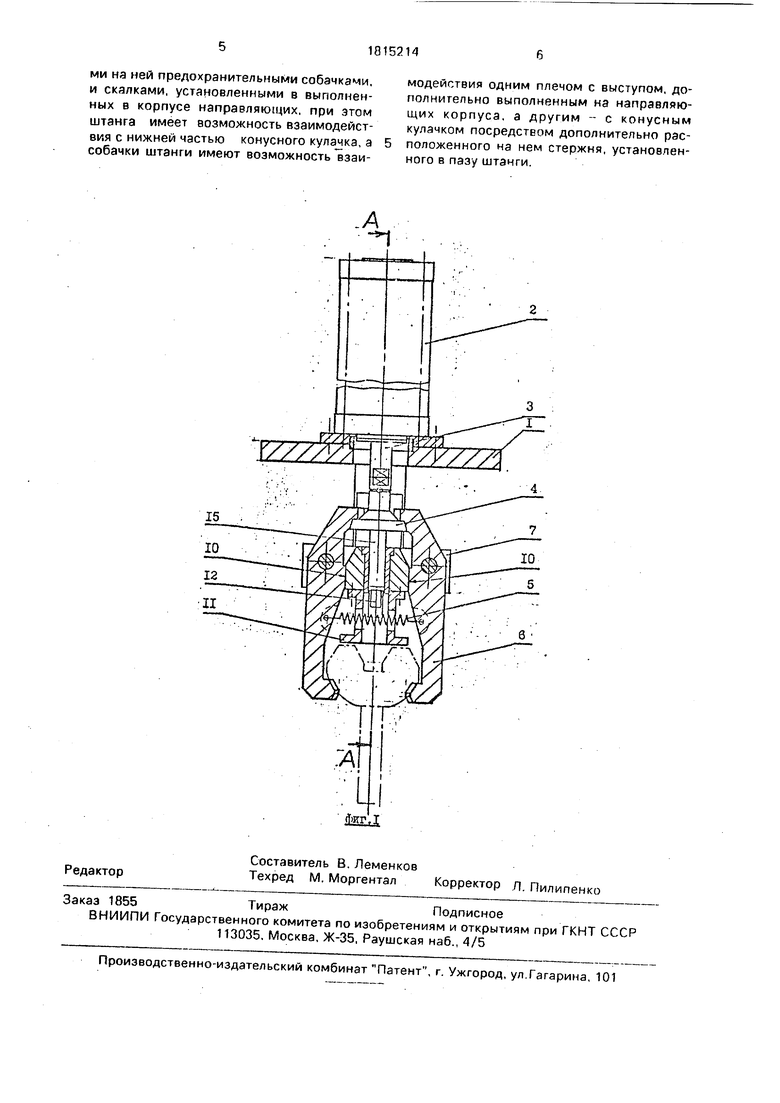
На фиг.1 изображен общий вид захвата в вертикальном положении; на фиг.2 - разрез А-А на фиг.1.
Захват состоит из корпуса 1, на котором установлен пневмоцилиндр 2, шток 3 которого жестко связан с конусным кулачком 4. На горизонтальную поверхность конусного кулачка 4 посажены подпружиненные пружиной 5 поворотные рычаги 6, шарнирно установленные на штанге 7, которая жестко соединена со скалками 8, смонтированными с возможностью перемещения в направляющих втулках 9 корпуса 1. Крайнее сведенное положение поворотных рычагов 6 ограничено поверхностями 10 штанги 7, Кроме того на штанге установлен упор 11 и шарнирно смонтированы две предохранительные собачки 12, каждая из которых подпружинена относительно штанги 7 пружиной 13. Одним своим плечом собачки 12 имеют возможность взаимодействовать с выступами 14 направляющих корпуса 1, а другим своим плечом собачки взаимодействуют со стержнем 15 конусного кулачка 4.
Захват работает следующим образом.
При включении пневмоцилиндра 2 .его шток 3 с конусным кулачком 4 и посаженными на нем поворотными рычагами 6 опускаются вниз, при этом также перемещается вниз штанга 7 с упором 11 и скалками 8. При встрече с деталью поворотные рычаги 6 и штанга 7 останавливаются, а шток 3 вместе с конусным кулачком 4 продолжают перемещаться вниз, что дает возможность поворот- ным рычагам 6 расфиксировагься и в дальнейшем разойтись. После упора конусного кулачка 4 в штангу 7, последняя вместе с поворотными рычагами 6 продолжает перемещаться вниз. При этом рычаги 6, преодолевая усилие пружины 5, расходятся и, огибая деталь, под действием этой же пружины, возвращаются в крайнее сведенное положение, ограниченное поверхностями 10 штанги 7. Происходит захват детали. В захваченном положении от невыпадения деталь ограничена сверху упором 11. При подъеме шток 3 пневмоцилиндра 2 вместе с конусным кулачком 4 устремляются вверх и последний, входя во взаимодействие с поворотными рычагами 6, увлекает их и штангу 7 за собой, одновременно фиксируя своим конусным участком рычаги 6, которые могут разойтись под действием веса детали. В
верхнем положении деталь (кулак шарнира автомобиля ГАЗ-66) разворачивают вокруг вертикальной оси на 90° и вынимают из захвата с помощью специального устройства (не показано).
При опускании захвата вниз, шарнирно установленные на штанге 7 предохранительные собачки 12 одними из своих плеч взаимодействуют с выступами 14 направля0 ющих корпуса 1. Если происходит аварийное опускание захвата, вызванное, например прекращением подачи воздуха в пневмоцилиндр, то предохранительные собачки 12 надежно фиксируют штангу 7 с
5 поворотными рычагами 6 относительно корпуса 1 и предотвращают дальнейшее опускание захвата под действием собственного веса. При этом конструкция предохранительных собачек 12 и расположение их осей
0 на штанге 7 относительно выступов 14 на направляющих корпуса 1, а также усилие пружин 13 и плечи их приложения к собачкам подобраны таким образом, чтобы при взаимодействии стержня 15 конусного ку5 лачка 4 с двумя другими плечами собачек 12, последние не сумели бы развернуться вокруг своих осей, что привело бы к расфикса- ции штанги 7 с рычагами 6 относительно корпуса 1. Если же происходит рабочее опу0 скание захвата, то под действием давления- воздуха стержень 15, связанный посредством конусного кулачка 4 со штоком 3 пневмоцилиндра 2, преодолевая усилие пружин 13, разворачивает собачки 12 относительно
5 их осей, в результате чего верхние плечи собачек сходят с выступов 14 и штанга 7 вместе с рычагами 6 продолжает опускаться вниз до захвата детали. При возвращении захвата в исходное положение, плечи соба0 чек, скользя по скосам выступов 14, в конце хода заскакивают за них. Далее цикл повторяется.
Использование предлагаемого изобретения позволяет повысить надежность ра5 боты захвата за счет исключения его самопроизвольного опускания, в результате чего предотвращается поломка оборудования в зоне захвата, улучшаются условия выполнения техники безопасности.
0
Формула изобретения Захват, содержащий корпус, поворотные шарнирно закрепленные на корпусе подпружиненные рычаги, имеющие воз- 5 можность взаимодействовать с конусным кулачком, связанным со штоком привода, отличающийся тем, что, с целью повышения надежности за счет исключения самопроизвольного опускания захвата, он снабжен штангой с пазом и с установленныг
ми на ней предохранительными собачками, и скалками, установленными в выполненных в корпусе направляющих, при этом штанга имеет возможность взаимодейстмодействия одним плечом с выступом, дополнительно выполненным на направляющих корпуса, а другим - с конусным кулачком посредством дополнительно рэс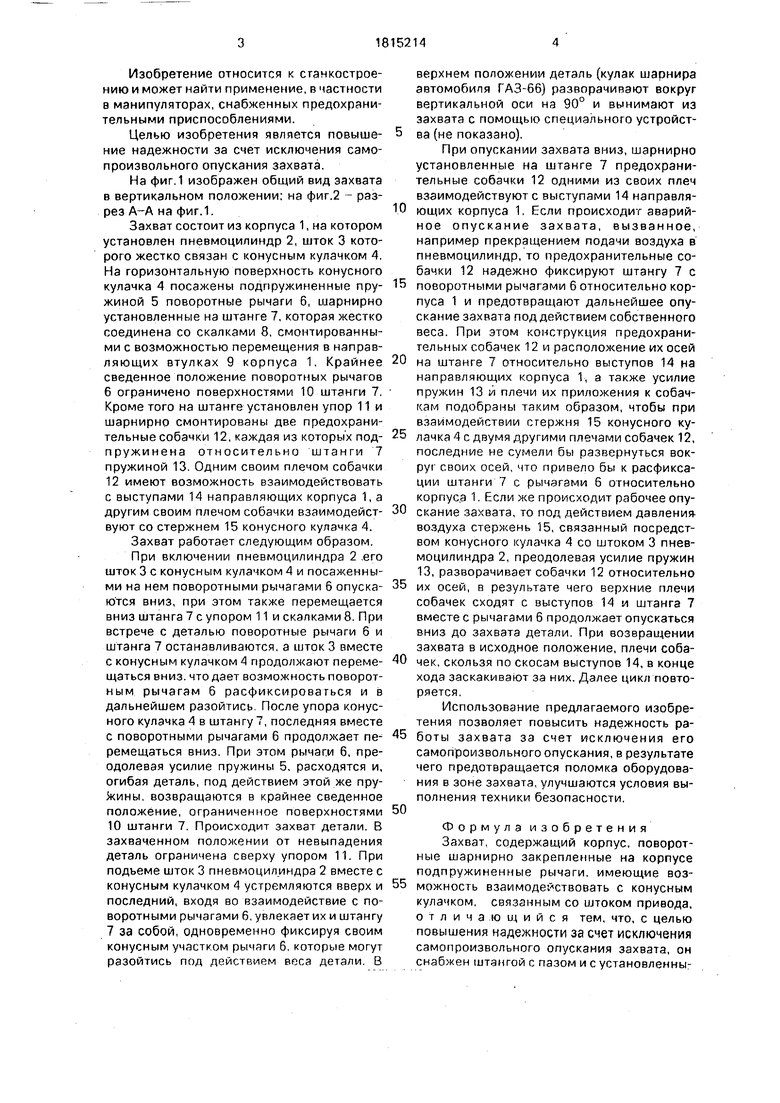
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗГОТОВЛЕНИЯ ЦИЛИНДРИЧЕСКИХ ИЗДЕЛИЙ ТИПА ЧЕРВЯЧНЫЙ ХОМУТ И ПОЛУАВТОМАТ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2445180C1 |
| Манипулятор для автоматической смены инструментов | 1986 |
|
SU1393578A1 |
| Машина для мытья, ополаскивания и сушки бутылок | 1927 |
|
SU25415A1 |
| Устройство для обработки выводов радиоэлементов | 1988 |
|
SU1580604A1 |
| Контейнер | 1979 |
|
SU854816A1 |
| Устройство для свинчивания и развинчивания бурового става | 1982 |
|
SU1134696A1 |
| Машина для притирки пробок к стеклянным флаконам | 1952 |
|
SU96620A1 |
| Штанговый конвейер | 1986 |
|
SU1406085A1 |
| УСТРОЙСТВО ДЛЯ ЗАГРУЗКИ ДРОТОМ ПАТРОНОВ СТЕКЛОФОРМУЮЩЕЙ МАШИНЫ | 1970 |
|
SU269440A1 |
| Устройство для выдачи и ориентации штучных заготовок | 1987 |
|
SU1479178A1 |
Использование: в станкостроении, в частности в манипуляторах, снабженных предохранительными приспособлениями. Сущность изобретения: повышение надежности работы захвата путем исключения его самопроизвольного опускания. Для этого на штанге 7 шарнирно смонтированы две прег дальнейшему опусканию захвата вниз. 2 ил, дохранительные собачки 12, каждая из которых подпружинена относительно штанги 7 пружиной 13. При самопроизвольном опускании захвата собачки 12 одним своим плечом имеют возможность взаимодействовать с выступами 14 направляющих корпуса 1 и тем самым фиксировать относительно последнего штангу 7 с поворотными рычагами б. При рабочем ходе собачки 12 другими своими плечами взаимодействуют со стержнем 15 конусного кулачка 4, который жестко связан со штоком 3 пнеемоцилиндра 2. При этом собачки поворачиваются на осях штанги 7, сходят с выступов 14 направляющих корпуса 1 и тем самым не препятствуют
вия с нижней частью конусного кулачка, а 5 положенного на нем стержня, установлен- собачки штанги имеют возможность взаи- ного в пазу штанги.
.А
| Захват | 1980 |
|
SU942983A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
