00
ел
Фиг. 2
Изобретение относится к машиностроению и может .быть использовано на сборочных участках поточно-механизированных линий для выполнения необходимых технологических операций. Цель изобретения - повышение надежности работы конвейера.
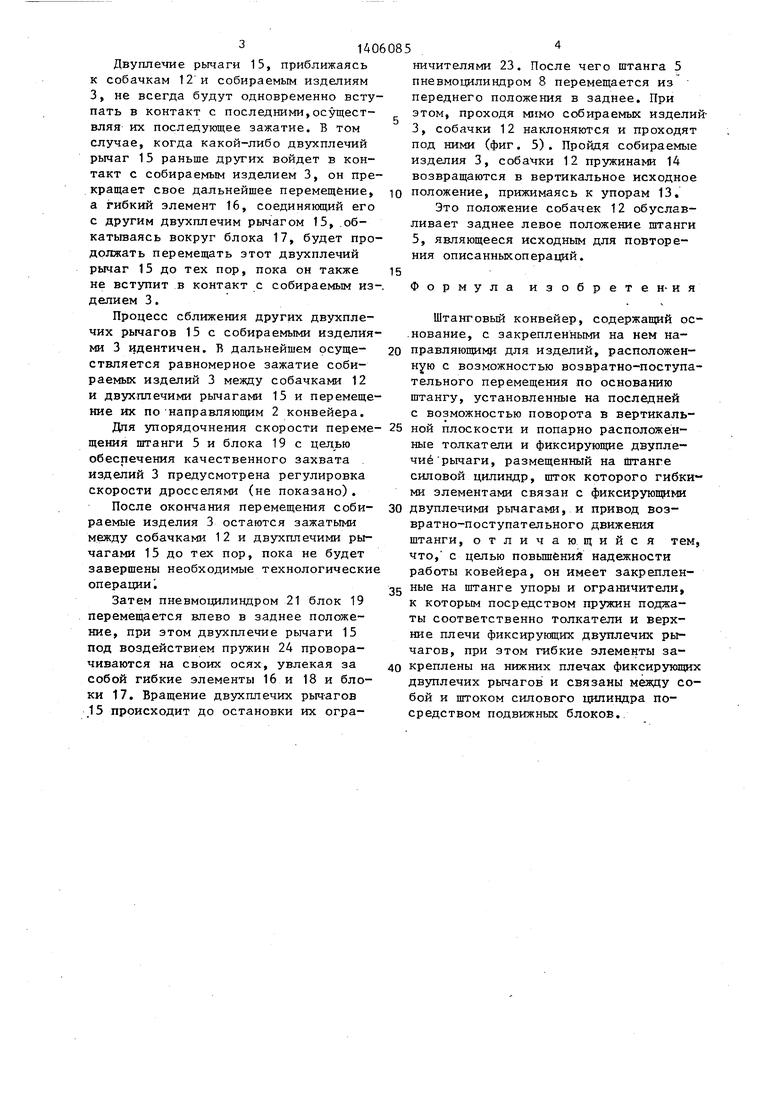
На фиг. 1 изображен штанговый конвейер, вид сзади; на фиг. 2 - сечение А-А на фиг.1, штанга в крайнем заднем положении; на фиг.З - то же, начало движения штанги, изделие в зажатом состоянии; на фиг. 4 - то же, штанга в крайнем переднем положении, двуплечие рьиаги отведены; на фиг. 5 - то же, перемещение штанги и переднего положения в заднее положение.
Штанго.вый конвейер содержит осно
вание в виде неподвижной станины 1, в верхней части которой закреплены направляющие 2 для перемещения собираемых изделий 3. На внутренних стенках неподвижной станины 1, в средней части в продольном направлении установлены направляющие 4, в которых ра сположена с возможностью возвратно-поступательного перемещения штанга 5, стенки которой связаны между собой поперечина ми 6. В нижней части штанги 5 на боковых стенках закреплены ролики 7, на которых штанга 5 может осуществлять продольное перемещение внутри неподвижной станины 1 Привод возвратно-постзшательного перемещения .штанги 5 выполнен в виде -Jпнeвмoцилиндpa 8, шток 9 которого шарнирно закреплен в кронштейне 10, установленном в нижней части штанги 5, а корпус пневмоцилиндра 8 шарнирно закреплен в кронштейне 11, устаноленном в нижней части неподвижной станины 1. В верхней части штанги 5 вдоль внешних сторон с необходимым . шагом установлены с возможностью поворота в вертикальной плоскости (а именно шарнирно на осях) толкатели в виде собачек 12, которые поджаты к закрепленным на штанге 5 упорам 13 пос|гедством пружин 14. Для поджатия собираемых изделий 3 к собачкам 12, попарно с последними, с двух сторон
штанги 5 -шарнирно на осях установ- . лены поджимные фиксируюш 1е двуплечие рычаги 15, нижние плечи которых попарно связаны между собой гибкими элементами 16.
0
5
0
5 д 5
0
5
0
5
Гибкие элементы 16 связаны между собой посредством охватываемых их подвижных блоков 17 (фиг. 2-5), которые также связаны между собой гибким элементом 18, перекинутым через блок 19, которьй установлен на конце штока 20 силового цилиндра, в частности пневмоцилиндра 21, который размещен на штанге 5. Шток 20 пневмо- циливдра 21 перемещается в направляющей 22. Для поджатия двуплечих рычагов 15 к закрепленным на штанге ограничителям 23 предусмотрены пружины 24.
На фиг. 1-5 изображен штанговьй конвейер с четырьмя парами толкающих собачек, конвейер снабжен таким же количеством двухплечих рычагов. При необходимости штанговьй конвейер можно выполнить в ином конструктивном исполнении, введя в него дополнительное количество собачек и такое же количество двухплечих рычагов, причем каждый дополнительно внесенный двухплечий рычаг должен быть связан с остальными двухплечими рычагами дополнительной гибкой связью, перекинут той через дополнительный подвижньш блок.
Штанговый конвейер работает следующим образом.
Изделия 3 устанавливают на неподвижную станину 1 любым известным способом. В исходном положении, штанги 5 находятся в заднем положении, блок 19 также находится в заднем левом положении. Собачки 12 и двухплечие . рычаги 15 пружинами 14 и 24 прижаты к упорам 13 и ограничителям 29,
Для перемещения собираемых изделий 3 (шаг равен полному рабочему ходу пневмоцилиндра 8) штангу 5 при помощи пневмоцилиндра 8 перемещают из заднего положения в переднее, при этом собачки 12 начинают приближаты ся к собираемым изделиям 3. Одновременно с началом перемещения штанги 5 пневмоцилиндром 21 блок 19 аналогично штанге перемещается в переднее положение. Блок 19 через гибкий элемент 18, блоки 17, гибкие элементы 16, соединяющиенижние концы двухплечих рычагов 15, приводит их в движение. Таким образом в начальный период Перемещения штанги 5 и блоков 19 и 17, осуществляется сближение со бачек 12 и двухплечих рычагов 15 между собой и собираемыми изделиями 3.
Двуплечие рычаги 15, приближаясь к собачкам 12 и собираемым изделиям 3, не всегда будут одновременно вступать в контакт с поеледкими,осуществляя их последующее зажатие. В том случае, когда какой-либо двухплечий рычаг 15 раньше других войдет в контакт с собираемым изделием 3, он прекращает свое дальнейшее перемещение, а гибкий элемент 16, соединяющий его с другим двухплечим рычагом 15, .об- катьгааясь вокруг блока 17, будет продолжать перемещать этот двухплечий рычаг 15 до тех пор, пока он также
ничителями 23. После чего штанга 5 пневМОцилиндром 8 перемещается из переднего положения в заднее. При этом, проходя мимо собираемых изделий- 3, собачки 12 наклоняются и проходят под ними (фиг. 5). Пройдя собираемые изделия 3, собачки 12 пружинами 14 возвращаются в вертикальное исходное
положение, прижимаясь к упорам 13.
Это положение собачек 12 обуславливает заднее левое положение штанги 5, являющееся исходным для повторения описанныхопераций.
| название | год | авторы | номер документа |
|---|---|---|---|
| Установка для контроля герметичности полых изделий | 1986 |
|
SU1401308A1 |
| Шаговый конвейер | 1982 |
|
SU1008107A1 |
| Шаговый конвейер | 1977 |
|
SU663637A1 |
| Секция штангового конвейера | 1978 |
|
SU831679A1 |
| Штанговый конвейер | 1986 |
|
SU1419957A1 |
| Штанговый конвейер | 1978 |
|
SU763216A1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ЦИЛИНДРИЧЕСКИХ ИЗДЕЛИЙ ТИПА ЧЕРВЯЧНЫЙ ХОМУТ И ПОЛУАВТОМАТ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2445180C1 |
| Транспортное устройство автоматических линий | 1982 |
|
SU1033405A1 |
| Кантователь | 1973 |
|
SU510285A1 |
| Шагающий конвейер-накопитель | 1985 |
|
SU1270075A1 |

Изобретение относится к машиностроению, и м.б. использовано на сборочных участках поточно-механизированных .линий для выполнения необходимых технологических операций. Цель изобретения - повьшзение надежности работы конвейера. На основании 1 конвейера закреплены направляющие 2 для изделий 3 и расположена с возможностью возвратно-поступательного пере- меш;ения штанга (Ш) 5. На последней с.возможностью поворота в вертикальной плоскости и попарно расположены толкатели (Т) 12 и фиксирующие двуплечие рычаги () 15. На (Ш). 5 размещен силовой цилиндр 21, шток 20 которого связан с Р 15, жестко закрепленными на их нижних плечах гибкими элементами 16 и 18. Последние связаны между собой и штоком 20 подвижными блоками 17 и 19. На Ш 5 закреплены упоры и ограничители 23, к которым посредством пружин 24.поджаты соответственно Т 12 и верхние плечи Р 15. Конвейер имеет привод 8 возвратно- поступательного перемещения Ш 5. В начальный период перемещения Ш 5 и блоков 19 и 17 сближаются Т 12 и Р 15 между собой и собираемыми изделиями 3. Последние.равномерно зажимаются между Т 12 и Р 15 и перемещаются по направляющим 2. 5 ил. Л-Л. I (Л
не вступит в контакт с собираемым из-. Формула изобретен-ия делием 3..
Процесс сближения других двухпле- чих рычагов 15 с собираемыми изделиями 3 идентичен. В дальнейшем осуществляется равномерное зажатие собираемых изделий 3 между собачками 12 и двухплечими рычагами 15 и перемещение их по направляющим 2 конвейера.
Штанговый конвейер, содержащий ос- .нование, с закрепленными на нем на- 20 правляющими для изделий, расположенную с возможностью возвратно-поступательного перемещения по основанию штангу, установленные на последней с возможностью поворота в вертикальДпя упорядочнения скорости переме- 25 ной плоскости и попарно расположен-
щения штанги 5 и блока 19 с целью обеспечения качественного захвата изделий 3 предусмотрена регулировка скорости дросселями (не показано) .
После окончания перемещения собираемые изделия 3 остаются зажатыми между собачками 12 и двухплечими рычагами 15 до тех пор, пока не будет завершены необходимые технологически операцииi
Затем пневмоцилиндром 21 блок 19 перемещается влево в заднее положение, при этом двухплечие рьиаги 15 под воздействием пружин 24 проворачиваются на своих осях, увлекая за собой гибкие элементы 16 и 18 и блоки 17. Вращение двухплечих рыч-агов 15 происходит до остановки их ограШтанговый конвейер, содержащий ос- .нование, с закрепленными на нем на- 20 правляющими для изделий, расположенную с возможностью возвратно-поступательного перемещения по основанию штангу, установленные на последней с возможностью поворота в вертикальные толкатели и фиксирующие двуплечие рычаги, размещенный на Штанге силовой цилиндр, шток которого гибкими элементами связан с фиксирующими
30 двуплечими рычагами, и привод возвратно-поступательного движения штанги, отличающийся тем, что, с целью повьш1бний надежности работы ковейера, он имеет закреплен-
35 ные на штанге упоры и ограничители, к которым посредством пружин поджаты соответственно толкатели и верхние плечи фиксируннцих двуплечих рычагов, при этом гибкие элементы за40 креплены на нижних плечах фиксирующих двуплечих рычагов и связаны мелзду собой и штоком силового цилиндра посредством подвижных блоков..
/5
I I I I I I I- 7 1 Г ( & n Id 9 10 S 2i 16 22 7 20 tg фиг.5
Ч S 7 11 8 16 11
18 910 2116 20 7 2219 f f (pU3.S
