w
Ё
| название | год | авторы | номер документа |
|---|---|---|---|
| Переналаживаемая роботизированная система | 1981 |
|
SU998097A1 |
| Схват | 1987 |
|
SU1511114A1 |
| Многокулачковый самоцентрирующий центробежный патрон | 1983 |
|
SU1093414A1 |
| Токарный станок | 1983 |
|
SU1158296A1 |
| Самоцентрирующийся патрон | 1985 |
|
SU1273216A1 |
| Промышленный робот | 1986 |
|
SU1371896A1 |
| СПОСОБ КРЕПЛЕНИЯ ЗАГОТОВКИ ПРИ ТОКАРНОЙ ОБРАБОТКЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2201847C2 |
| Зажимной патрон | 1989 |
|
SU1683882A1 |
| Круглошлифовальный станок | 1988 |
|
SU1546235A1 |
| Зажимное устройство для токарного станка | 1983 |
|
SU1127696A1 |

Использование: в области станкостроения, в частности при обработке деталей типа вала-шестерни на станках с ЧПУ. Сущность изобретения: в корпусе 1 установлены три подвижных основания, соединенных с механизмом их перемещения, и направляющий стакан, соединенный с корпусом. К основаниям прикреплены кронштейн 6, в пазах которых установлены на осях подпружиненные пружинами, кручения 8 поворотные кулачки 9. В стакан вставлен подпружиненный пружиной сжатия и зафиксированный винтом 11 отклоняющий упор 12. После того как кронштейны 6 пройдут путь S, поступает команда на переме- -: щение каретки руки робота вправо. Вслед за деталью 13 под действием пружины перемещается упор 12. При выходе из патрона деталь 13 начинает проворачивать кулачки 9 относительно осей, а вслед за ней упор 12, пройдя расстояния L, фиксирует кулачки 9 в горизонтальном положении. 3 ил.
Изобретение относится к области станкостроения и может быть использовано при обработке деталей типа вала-шестерня на станках с Ч ЛУ, входящих в состав роботизированных технологических комплексов.
Целью изобретения является повышение надежности при работе в автоматическом режиме.
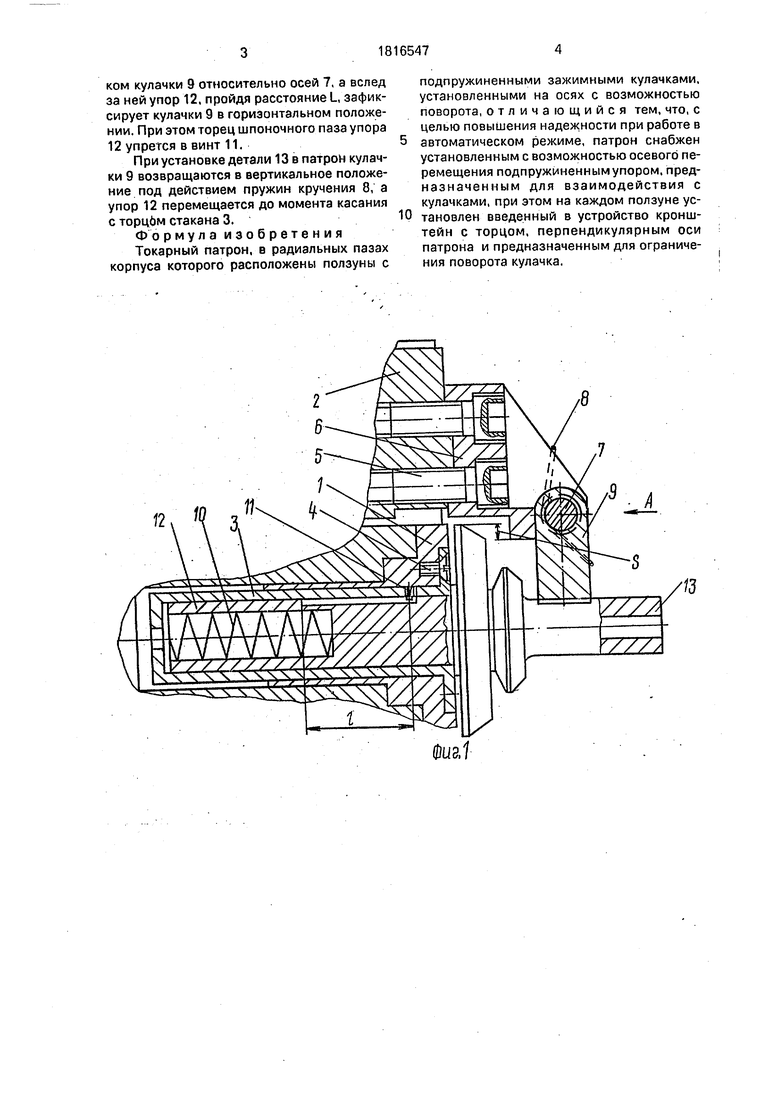
Устройство поясняется чертежом, где на фиг. 1 показан разрез патрона с установленной деталью; на фиг. 2 - то же, со снятой деталью; на фиг.З - вид по стрелке А на фиг.1,.
Патрон содержит корпус 1, крепящийся к шпинделю токарного станка (не показан), внутри которого установлены три подвижных основания 2, соединенных с механизмом их перемещения (не показан) и направляющий стакан 3, соединенный с корпусом 1 винтами 4. К подвижным основаниям 2 винтами 5 прикреплены кронштейны 6, в пазах которых установлены на осях 7 подпружиненные пружинами кручения 8 поворотные кулачки 9.
В направляющий стакан 3 вставлен подпружиненный пружиной сжатия 10 и зафиксированный винтом 11 отклоняющий упор 12.
Патрон работает в автоматическом режиме следующим образом.
После окончания обработки детали 13 рука робота (не показана) захватывает ее за хвостовик и посылает команду на механизм перемещения основания 12. Как только кронштейны. 6 пройдут путь 5,поступает команда на перемещение каретки руки робота вправо. Вслед за перемещающейся деталью 13, не нарушая контакта с ней, под действием пружины сжатия 10 перемещается и упор 12. При выходе из патрона деталь 13 начинает проворачивать своим оголов00
CN СЛ
4 VI
ком кулачки 9 относительно осей 7, а вслед за ней упор 12, пройдя расстояние L, зафиксирует кулачки 9 в горизонтальном положении. При этом торец шпоночного паза упора 12 упрется в винт 11.
При установке детали 13 в патрон кулачки 9 возвращаются в вертикальное положение под действием пружин кручения 8, а упор 12 перемещается до момента касания с торцс-м стакана 3.
Ф о рмулаизобретения Токарный патрон, в радиальных пазах корпуса которого расположены ползуны с
0
подпружиненными зажимными кулачками, установленными на осях с возможностью поворота, отличающийся тем, что, с целью повышения надежности при работе в автоматическом режиме, патрон снабжен установленным с возможностью осевого перемещения подпружиненным упором, предназначенным для взаимодействия с кулачками, при этом на каждом ползуне установлен введенный в устройство кронштейн с торцом, перпендикулярным оси патрона и предназначенным для ограничения поворота кулачка.
Редактор М,Кузнецова
Фиг.З
Составитель А.Крваленко
Техред М.МоргенталКорректор А.Козориз
