Устройство относится к области гироскопических устройств, систем и может быть использовано в гироскопических сйс- темах формирования требуемого направления, положения.
Целью изобретения является повышение точности.
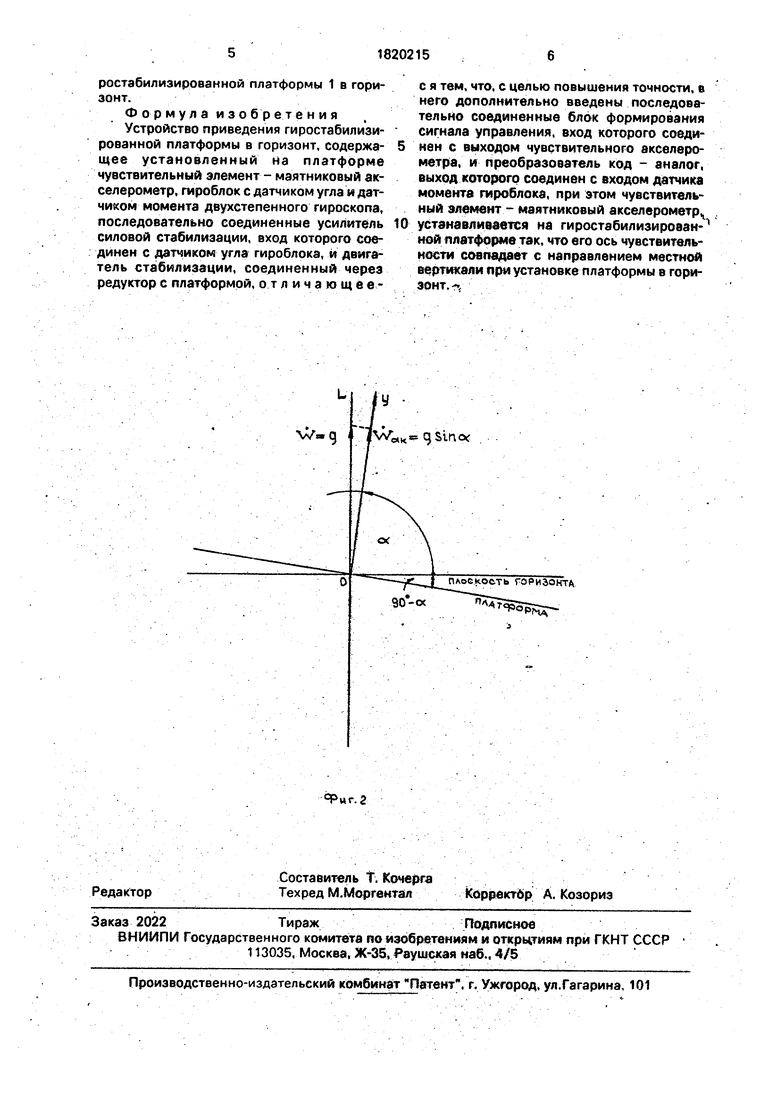
Изобретение поясняется фиг:1 и 2. . Устройство приведения гиростабилизированной платформы в горизонт содержит платформ.У 1, чувствительный элемент т маятниковый акселерометр 2, гироблок Зс дат- чиком угла 4 и датчиком момента 5 двухстепенного гироскопа €, в котором выход датчика угла прецессии 4 двухстепенного гироскопа 6 через усилитель стабилизации 7 подключен ко входу двигателя стабилизации 8, выход которого через редуктор 9 соединен с платформой 1. В устройство приведения дополнительно введены блок формирования сигнала управления 10 и преобразователь код - аналог 11. Вы ход маятникового акселерометра 2 подключен ко входу блока формирования сигнала управления 10, а выход блока формирования сигнала управления 10 подключен ко входу преобразователя код - аналог 11, выход которого подключен ко входу датчика момента 5 двухстепенного гироскопа 6.
Устройство приведения гиростабилизи- рованной платформы в горизонт работает следующим образом.
Маятниковый акселерометр 2 установлен на гиростабилизированной платформе 1 (фиг.2) так, что проекция ускорения на ось чувствительности акселерометра 2 определяется выражением
Л/ак g.sln a ,
(1)
где Wax - проекция ускорения на ось чувствительности акселерометра;
g - ускорение силы тяжести данного места;
а -угол отклонения оси чувствительности от направления плоскости горизонта, а величина сигнала с акселерометра 2 определяется выражением
Kn.g.sin a
(2)
где Кп - коэффициент пропорциональности акселерометра 2.
Величина сигнала, характеризующего величину угла отклонения оси чувствительности акселерометра 2 от направления местной вертикали или гиростабилизированной платформы 1 от плоскости горизонта, определяется следующим выражением
Д1) и ак-иак
(3)
где A U - сигнал, характеризующий
величину угла отклонения оси чувствительностй от направления местной вертикали
или гиростабилиэированной платформы 1
от плоскости горизонта;
- величина сигнала с акселерометра 2, соответствующая величине для данно- то места установки гиростабилизированной платформы 1, т.е. при такой величине сигнала с акселерометра 2 его ось чувствительности совпадает с направлением местной вертикали, а платформа 1 выставлена в пло- скость горизонта;
Uaic- текущее значение сигнала с акселерометра.
Величина вводится в блок формирования сигнала управления 10. После каждого опроса выхода акселерометра 2 данный блок вычисляет ( Д Uaxjk по выражению .(3), т.е
25
( Д U)k (LlaK) k),
(4)
где {Uai)k - текущее значение при к-ом опросе выхода акселерометра 2. Величина (Ua«)k запоминается.
Кроме того, блок формирования сигнала управления 10 после каждого пороса выхода акселерометра 2 вычисляет разность между (U3K)k и (Uaic)-k-1, т.е.
35
д k (Uaic)k-(U ax)k-1,
(5)
и формирует сигнал управления (iBy) k no алгоритму
.(Д U)k.y k,
4- Г sign (lBy)k - 1,
Гк
45
- sign (ley)k - 1 , при 5k 0.
Знак (By)k запоминается. Величина КВу выбирается из условия обеспечения требуемых статических и динамических характеристик устройства приведения с учетом передаточных функций акселерометра 2, преобразователя код - аналог 11 и датчика момента 5. Сигнал управления (6) подается через преобразователь код - аналог 12 на
вход датчика момента 5 двухстепенного гироскопа 6. Передаточная функция преобразователя код - аналог 11 выбирается из условия обеспечения динамических и статических свойств устройства приведения гиростабилизированной платформы 1 в горизонт.
Формула изобретени я Устройство приведения гиростабилизи- рованной платформы в горизонт, содержащее установленный на платформе чувствительный элемент - маятниковый акселерометр, гироблок с датчиком угла и датчиком момента двухстепенного гироскопа, последовательно соединенные усилитель силовой стабилизации, вход которого соединен с датчиком угла гироблока, и двигатель стабилизации, соединенный через редуктор с платформой, отличающее0
с я тем, что, с целью повышения точности, в него дополнительно введены последовательно соединенные блок формирования сигнала управления, вход которого соединен с выходом чувствительного акселерометра, и преобразователь код - аналог, выход которого соединен с входом датчика моменте гироблока, при этом чувствительный элемент - маятниковый акселерометр устанавливается на гиростабилизирован-1 ной платформе так, что его ось чувствительности совпадает с направлением местной вертикали при установке платформы в горизонт. TV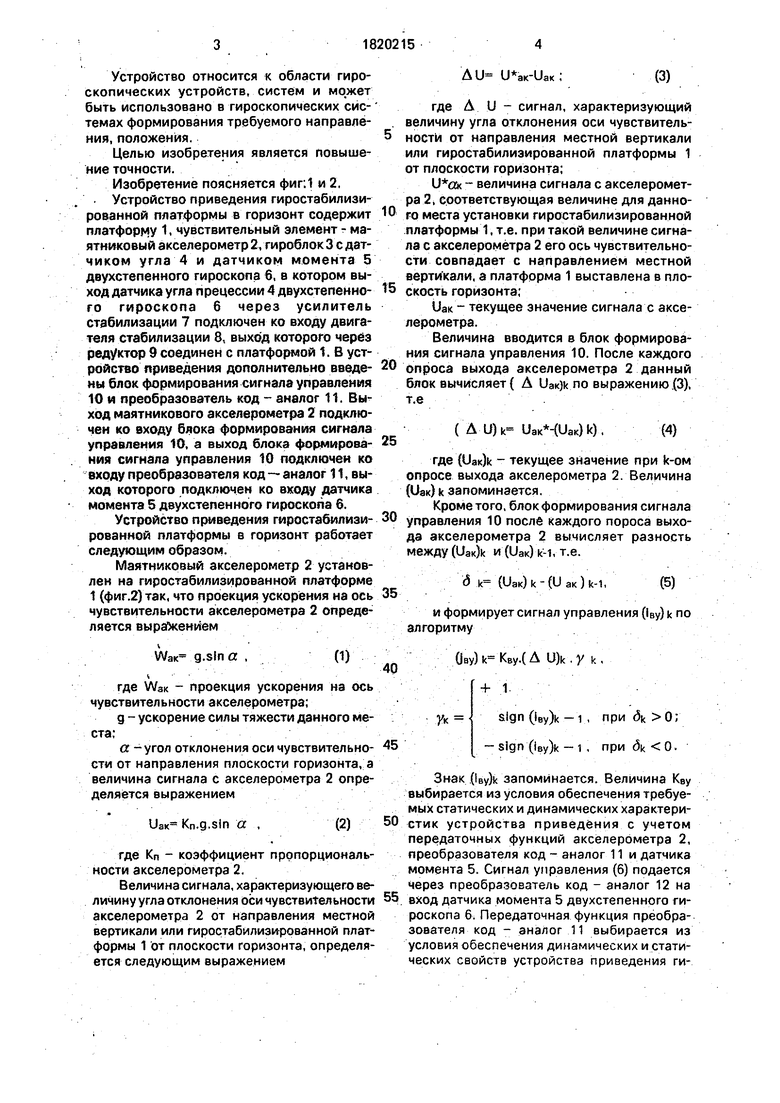
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО СТАБИЛИЗАЦИИ, УСКОРЕННОГО ВОССТАНОВЛЕНИЯ И КОНТРОЛЯ СИЛОВОЙ ГИРОСКОПИЧЕСКОЙ ВЕРТИКАЛИ | 2000 |
|
RU2172934C1 |
| Одноосный силовой горизонтальный гиростабилизатор | 2020 |
|
RU2748143C1 |
| СПОСОБ АВТОНОМНОЙ АЗИМУТАЛЬНОЙ ОРИЕНТАЦИИ ПЛАТФОРМЫ ТРЕХОСНОГО ГИРОСТАБИЛИЗАТОРА НА ПОДВИЖНОМ ОСНОВАНИИ | 2013 |
|
RU2541710C1 |
| САМООРИЕНТИРУЮЩАЯСЯ СИСТЕМА ГИРОКУРСОКРЕНОУКАЗАНИЯ | 2001 |
|
RU2192622C1 |
| Азимутальная ориентация платформы трехосного гиростабилизатора | 2016 |
|
RU2630526C1 |
| НАЗЕМНАЯ ГИРОСКОПИЧЕСКАЯ СИСТЕМА (ВАРИАНТЫ) | 2002 |
|
RU2213937C1 |
| Способ калибровки гироблоков платформы трехосного гиростабилизатора | 2020 |
|
RU2757854C1 |
| АЗИМУТАЛЬНАЯ ОРИЕНТАЦИЯ ПЛАТФОРМЫ ТРЕХОСНОГО ГИРОСТАБИЛИЗАТОРА ПО УГЛУ ПРЕЦЕССИИ ГИРОБЛОКА | 2006 |
|
RU2324897C1 |
| АЗИМУТАЛЬНАЯ ОРИЕНТАЦИЯ ПЛАТФОРМЫ ТРЕХОСНОГО ГИРОСТАБИЛИЗАТОРА ПО ПРИРАЩЕНИЯМ УГЛА ПРЕЦЕССИИ ГИРОБЛОКА | 2012 |
|
RU2509289C2 |
| ОДНООСНЫЙ СИЛОВОЙ ГИРОСТАБИЛИЗАТОР | 2008 |
|
RU2382331C1 |
Устройство относится к области гироскопических устройств и может быть использовано в гироскопических системах формирования требуемого направления положения. Целью изобретения является повышение точности. Поставленная цель достигается тем, что на гиростабилизиован- ной платформе 1 чувствительный элемент 2 устанавливается так, что, когда платформа 1 выставлена в горизонт, его ось чувствительности совпадает с направлением местной вертикали, а для обеспечения работоспособности системы приведения гиростабили- зированной платформы в горизонт дополнительно введены последовательно соединенные блок формирования сигнала управления 10, вход которого соединен с выходом чувствительного элемента 2, и преобразователь код - аналог, выход которого соединен с датчиком момента гироблока. 2 ил. «ч СО ю о ю ел
:WeiKw«(jsiri
30 -«
ПЛОСКОСТЬ ГОРИЗОНТА
р5чГ
| Назаров Б.И, Командно-измерительные приборы | |||
| М.: МО СССР | |||
| Сплав для отливки колец для сальниковых набивок | 1922 |
|
SU1975A1 |
