Изобретение относится к горным машинам и может быть использовано в электрогидравлических приводах одноковшовых и роторных экскаваторов, землеройно-транс- портных машин и т.д.
Цель изобретения - повышение надежности рабочего органа путем снижения динамических нагрузок.
На фиг, 1 изображена принципиальная схема адаптивного электрогидравлического привода экскаватора; на фиг. 2 - принципиальная схома блока электронной модели гидравлического механизма изменения подачи насоса.
Адаптивный электрогидравлический привод экскаватора содержит регулируемый нереверсивный насос 1 с гидравлическим механизмом 2 изменения подачи насоса и соединенный с его входом блока 3 злектрогидравлического дистанционного пропорционального управления подачей насоса, а также подключенный к гидронасосу через гидравлические линии 4 и 5 и блок 6 коммутирующих клапанов, гидроцилиндр 7, шток которого соединен с рабочим орга- ном 8, и присоединенный к гидролиниям 4 и 5 предохранительный клапан 9.
С целью повышения надежности путем снижения динамических нагрузок в режиме стопорения рабочего органа дополнительно введены первый 10 и второй 11 датчики давления, первый 12 и второй 13 нелинейные элементы с характеристикой зона нечувствительности с ограничением, первый суммирующий усилитель 14, двухполярный стабилизатор 15, блок 16 выделения модуля, управляемый переключатель 17, с информационными входами 18 и 19, управляющим входом 20 и выходом 21, первый диод 22, датчик 23 тока катушки электромагнита блока дистанционного управления подачей насоса, блок 24 электронной модели гидравлического механизма изменения подачи насоса 24, блок 25 диагностирования режима стопорения рабочего органа, содержащий второй 26 и третий 27 суммирующие усилители, блок
28 дифференцирования, четвертый суммирующий усилитель 29, пороговый элемент 30 и второй диод 31, при этом вход датчика 10 присоединен к напорной гидролинии 4, выход датчика 11 давления присоединен к сливной гидролинии 5, выходы датчиков давления через нелинейные элементы 12 и 13 соответственно подключены к первому и второму входам усилителя 14 с двуполяр- ным ограничением выходного сигнала, третий вход которого подключен к источнику задающего напряжения Уз, выход усилителя 14 через блок 16 выделения модуля подключен к первому информационному входу 18 переключателя 17, к второму входу 19 которого подключено напряжение Кет отрицательной полярности, выход 21 через диод 22 соединен с катушкой электромагнитного модуля 3 дистанционного управления. Выход датчика 23 тока катушки электромагнита модуля 3 подключен через блок 24 электронной модели гидравлического механизма изменения подачи насоса и соединен с первым входом второго сумматора 26 блока 25 диагностирования режима стопорения рабочего органа, второй вход усилителя 26 подключен к источнику задающего напряжения 1)з, третий вход которого подключен к источнику постоянного напряжения Ui, пропорционального величине давления отсечки РОСТ. Выход усилителя 26 соединен с первым входом третьего сумматора 27, второй вход которого соединен с выходом датчика 10 давления, выход третьего сумматора соединен с первым входом четвертого сумматора 29, и через второй диод 31 и блок 28 дифференцирования соединен с вторым входом четвертого сумматора 29, выход которого через пороговый элемент 30 соединен с уп- рэчляющим входом 20 управляемого переключателя 17.
Передаточная функция модели гидравлического механизма
Q(P) Кдп
РУ ( Р ) Р2ТщТ2п + РТщ + Г
где Ру - сигнал давления с выхода модуля дистанционного пропорционального управления подачей насоса;
Q - подача насоса;
Кдп - коэффициент подачи;
Tin. Т2п - постоянные времени.
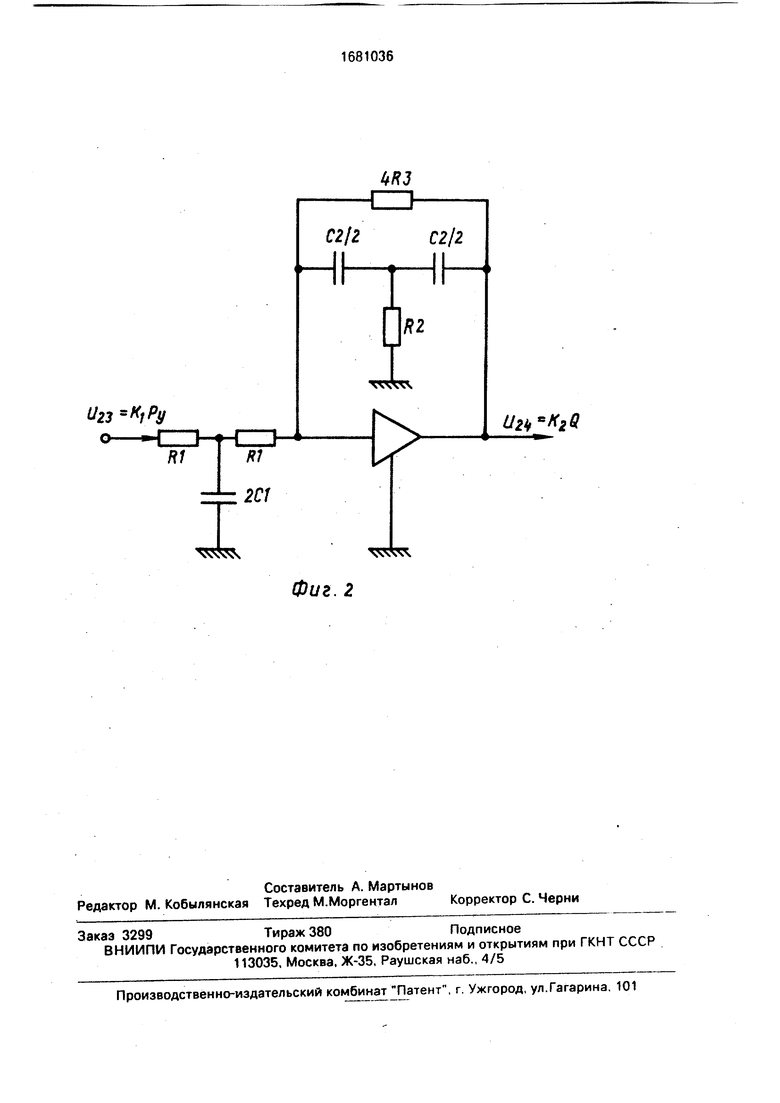
На фиг. 2 изображена схема блока электронной модели гидравлического механизма изменения подачи передаточную функцию
U24(P)2R3
U23 ( Р )
2 Яз
насоса, им
1
R1
где
R
Р R2 R3 С§ + Р R2C2 Кдп, R2C2 Tin, RaC2 T2n
Адаптивный электрогидравлический привод экскаватора функционирует следующим образом.
На третий вход усилителя 14 поступает задающее напряжение Уз, величина которого пропорциональна требуемому значению подачи насоса Юз.
Блок 16 служит для получения сигнала одинаковой полярности при обоих направлениях перемещения штока гидроцилиндра. Необходимое направление перемещения штока гидроцилиндра при используемом в данном приводе нереверсивном регулируемом насосе 1 обеспечивается блоком б коммутирующих клапанов.
При отсутствии управляющего сигнала на управляющем входе 20 управляемого переключающего блока 17 замкнута цепь 18 - 21 и сигнал с выхода блока 16 поступает через диод 22 на катушку электромагнита блока 3 дистанционного пропорционального управления подачей насоса.
На выходе блока 3 устанавливается давление Ру, изменяющееся пропорционально величине тока 1Эм в катушке электромагнитного модуля. Рабочий орган 8 перемещается на расстояние, пропорциональное значению давления управления Ру. При этом изменяется подача насоса Q Кдп Ру.
На выходе датчика 10 давления вырабатывается напряжение, пропорциональное давлению в напорной магистрали Рв. Это напряжение поступает на вход нелинейного элемента 12, зона нечувствительности которого пропорциональна давлению отсечки Рост. Если напряжение на выходе датчика давления превышает зону нечувствительности нелинейного элемента, то на выходе этого элемента появляется напряжение, поступающее на первый вход усилителя 14. Полярность этого напряжения противоположна полярности напряжения Us- Поэтому по мере роста давления в напорной магистрали Рв (в области Рв Рост.), напряжение на выходе усилителя 14 постепенно уменьша0
ется, что приводит к уменьшению тока Эм и снижению давления управления Ру и соответственно к снижению подачи насоса Q, т,е, к снижению скорости штока гидроцилиндра 7 и рабочего органа 8. т.е. формируется экскаваторная характеристика зависимости подачи Q от давления Рв в напорной магистрали.
Суммирующий усилитель 26 блока 25 диагностирования осуществляет вычисление статической составляющей давления Рв в функции текущего значения подачи насоса Q согласно уравнению
15
0
5
0
5
0
5
0
5
Q3
Р„ М- -У- + Р„т,
IE отс
Кр2
где Оз - заданная подача насоса; К 9 °3
Кр2
Напряжение на втором входе усилителя 26 пропорционально выражению Оз/Кр2, третий вход подключен к постоянному напряжению Ui, пропорциональному РОСТ. Нз второй и третий вход усилителя 26 с выхода блока 24 подается напряжение, пропорциональное текущему значению подачи насоса Q, т.е. пропорциональное Q/Kp2.
Напряжение на первом вхсде усилителя 26 имеет полярность, противоположную полярности напряжения на его втором и третьем входах, Напряжение на выходе усилителя 26 пропорционально значению давления Рв. Суммирующий усилитель 27 осуществляет вычисление динамического выброса давления ДРе, которое происходит при резком стопорении. Величина ДРВ обусловлена в основном электромагнитной инерционностью катушки электромагнита модуля 3, а также механической инерционностью механизма 2.
На первый вход усилителя 27 поступает сигнал, пропорциональный действительному давлению Рв в напорной магистрали. На второй вход поступает сигнал с выхода усилителя 26 пропорциональный статической составляющей давления Рв. Это напряжение имеет полярность, противоположную напряжению на первом входе усилителя, т.е. на выходе формируется сигнал, пропорциональный динамическому выбросу давления ДР8 в режиме стопорения.
Напряжение на выходе блока 28 дифференцирования пропорционально скорости изменения сигнала ДРВ. Напряжение на обоих входах усилителя 29 имеет одинаковую полярность, и с выхода усилителя 29 поступает на вход порогового элемента 30. При наступлении режима стопорения сигнала на входе порогового элемента 30 достигает порога переключения, и на его выходе
формируется сигнал Лог. 1, которая переключает блок 17, и на выходе становится сигнал, равный UCT. Величина этого сигнала в несколько раз превышает номинальное напряжение катушки электромагнита модуля 3, т.е. в режиме стопорения происходит форсированное снижение тока катушки электромагнита эм.
Вследствие этого происходит также форсированное снижение давления управления Ру и, следовательно, подачи насоса Q,
Благодаря ускоренному снижению подачи насоса Q в режиме стопорения предлагаемое техническое решение обеспечивает снижение стопорных динамических усилий.
Формула изобретения Адаптивный электрогидравлический привод экскаватора, содержащий регулируемый гидронасос с гидравлическим механизмом изменения подачи насоса и соединенный с его входом блок электрогидравлического дистанционного пропорционального управления подачей насоса, а также подключенный к гидронасосу через гидравлические линии и блок коммутирующих клапанов гидроцилиндр, шток которого соединен с рабочим органом, и присоединенный к гидролиниям предохранительный клапан, отличающийся тем, что, с целью повышения надежности путем снижения динамических нагрузок а режиме стопорения рабочего органа, введены первый и второй датчики давления, первый и второй нелинейные элементы с характеристикой типа зона нечувствительности с ограничением, первый суммирующий усилитель с двухполярным ограничением в цепи обратной связи, блок выделения модуля, управляемый переключатель, первый диод, датчик тока катушки электромагнита блока дистанционного управления подачей насоса, блок электронной модели гидравлического механизма изменения подачи насоса, второй суммирующий усилитель, третий суммирующий усилитель, второй диод, блок дифференцирования, четвертый суммирующий усилитель и пороговый элемент, причем вход первого датчика давления присоединен к напорной гидролинии, вход второго датчика давления присоединен к сливной гидролинии, выходы датчика давления подключены
соответственно через первый и второй нелинейные элементы к первому и второму входам первого суммирующего усилителя, третий вход которого подключен к источнику гадающего напряжения положительной
полярности, выход первого суммирующего усилителя через блок выделения модуля подключен к первому информационному входу управляемого переключателя, второй информационный вход которого соединен с
источником отрицательного напряжения, а выход подключен к аноду первого диода, катод которого соединен с катушкой электромагнита блока дистанционного управления подачей, выход датчика тока катушки
электромагнита блока дистанционного управления подачей через блок электронной модели подключен к первому входу второго сумматора, второй вход которого соединен с источником задающего напряжения положительной полярности, третий вход которого подключен к источнику постоянного напряжения, пропорциональному величине давления отсечки, выход второго сумматора соединен с первым входом второго сумматора, второй вход которого соединен с первым датчиком давления, выход третьего сумматора соединен с первым входом четвертого сумматора и с анодом второго диода, катод которого через блок дифференцирования соединен с вторым входом четвертого сумматора, выход которого через пороговый элемент соединен с управляющим входом управляемого переключателя.
U23 lPy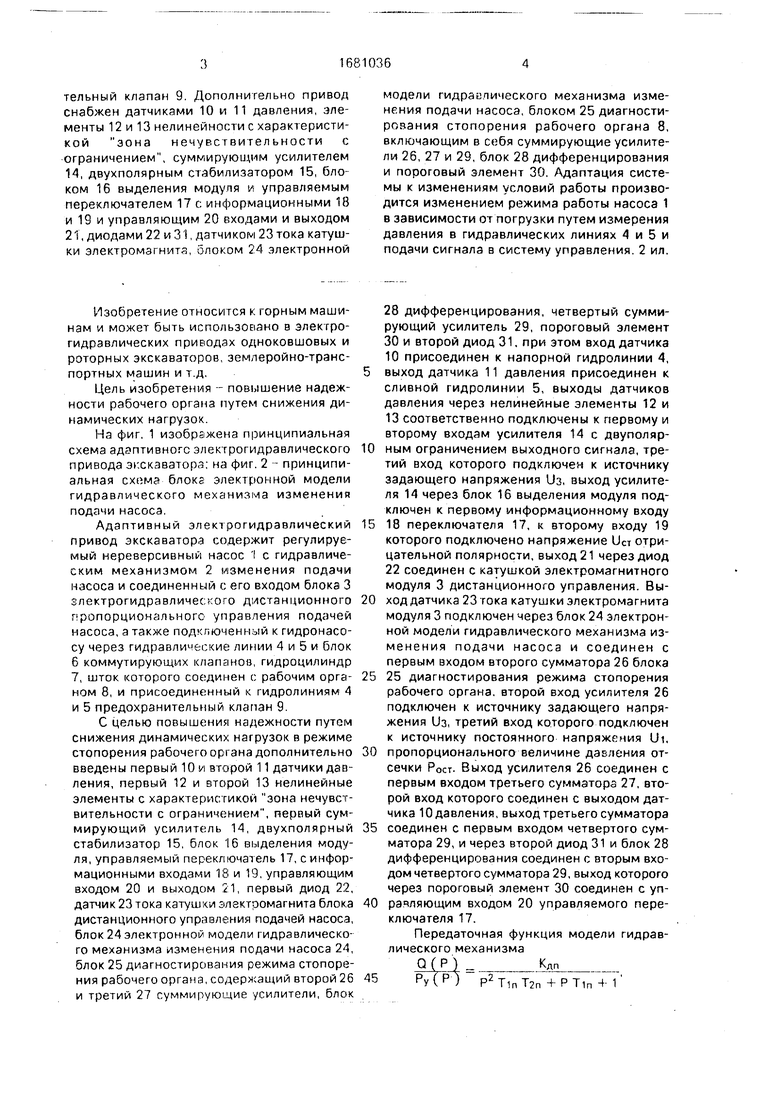

| название | год | авторы | номер документа |
|---|---|---|---|
| Электрогидравлическая система | 1989 |
|
SU1774072A1 |
| Электрогидравлическая система | 1989 |
|
SU1714219A1 |
| Электрогидравлическая система | 1989 |
|
SU1781467A1 |
| Электрогидравлическая система | 1989 |
|
SU1828956A1 |
| Устройство адаптивного управления объемным гидравлическим приводом | 1989 |
|
SU1686407A1 |
| Электрогидравлическая система совмещенного управления строительной машиной | 1987 |
|
SU1502728A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1991 |
|
RU2029890C1 |
| Электрогидравлическая система управления | 2018 |
|
RU2682052C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1991 |
|
RU2029891C1 |
| Способ управления и синхронизации движения гидротехнического затвора и устройство для его осуществления | 1988 |
|
SU1617086A1 |
Изобретение относится к горной и строительной пром-сти и м.б. использовано в электрогидравлических приводах одноковшовых и роторных экскаваторов и землерой- ных машин. Цель изобретения - повышение надежности путем снижения динамических нагрузок в режиме стопорения рабочего органа экскаватора. Электрогидравлический привод содержит регулируемый нереверсивный насос 1 с гидравлическим механизмом 2 изменения подачи,блокЗ электрогидравлического дистанционного пропорционального управления подачей насоса 1. гидравлические линии 4 и 5, блок 6 коммутирующих клапанов, гидроцилиндр 7, предохрани
| Чупраков Ю.А, Гидропривод с средствами гидроавтоматики | |||
| - М.: Машиностроение, 1979, с | |||
| Аппарат для испытания прессованных хлебопекарных дрожжей | 1921 |
|
SU117A1 |
| Горный компас | 0 |
|
SU81A1 |
| Насосы радиально-поршневые с дистанционным пропорциональным управлением | |||
| Отраслевой каталог | |||
| Гидравлическое оборудование | |||
| ВНИИГИДРОПРИВОД | |||
| Механический грохот | 1922 |
|
SU41A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
