со С
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения параметров ориентации объекта при помощи полуаналитической инерциальной навигационной системы с географической ориентацией осей четырехосной гироплатформы | 2022 |
|
RU2782334C1 |
| Способ регулировки динамически настраиваемого гироскопа в составе инерциальной навигационной системы | 2020 |
|
RU2741501C1 |
| САМООРИЕНТИРУЮЩАЯСЯ СИСТЕМА ГИРОКУРСОКРЕНОУКАЗАНИЯ | 2001 |
|
RU2192622C1 |
| ИНЕРЦИАЛЬНАЯ СИСТЕМА | 2006 |
|
RU2326349C2 |
| СПОСОБ ВЫРАБОТКИ НАВИГАЦИОННЫХ ПАРАМЕТРОВ И ВЕРТИКАЛИ МЕСТА | 2005 |
|
RU2309384C2 |
| СПОСОБ ВЫРАБОТКИ НАВИГАЦИОННЫХ ПАРАМЕТРОВ | 2007 |
|
RU2346240C1 |
| КУРСОВАЯ СИСТЕМА | 2004 |
|
RU2279636C1 |
| СИСТЕМА УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ С КОМПЛЕКСНЫМ НАВИГАЦИОННЫМ УСТРОЙСТВОМ | 1994 |
|
RU2046736C1 |
| СПОСОБ ВЫРАБОТКИ НАВИГАЦИОННЫХ ПАРАМЕТРОВ И ВЕРТИКАЛИ МЕСТА | 2003 |
|
RU2247944C2 |
| ГИРОГОРИЗОНТКОМПАС | 1993 |
|
RU2051330C1 |
Изобретение относится к навигации, в частности к способам и устройствам автоматической выставки по курсу ИНС. Целью изобретения является повышение точности автоматической выставки по курсу ИНС за счет осуществления связи между следя.щи- ми системами гироплатформ, предварительной грубой выставки на Север, разворота первой гироплатформы до положения, когда вектор кинетического момента первого курсового гироскопа образует угол 90° с грубым направлением на Север, совместного разворота первой и второй гироплатформ на угол (-10)°, реверса и возвращения в исходное положение с последующим формированием сигналов суммы гироскопических моментов курсовых гироскопов первой .и второй гироплатформ в начале и конце вдвижения и в момент реверса и вычислением сигнала, пропорционального углу между направлением на Север и биссектрисой угла, образованного векторами кинетических моментов курсовых гироскопов. Точная выставка биссектрисы осуществляется за счет отслеживания этого сигнала следящими системами гироплатформ. 2 с.п. ф-лы, 5 ил.
Изобретение относится к навигации,в частности к способам и устройствам автоматической выставки по курсу инерциальных навигационных систем (ИНС).
Целью изобретения по способу является повышение точности автоматической выставки по курсу ИНС.
Указанная цель достигается тем, что в известном способе автоматической выставки по курсу ИНС с двумя гироплатформами, включающем в себя одновременный разгон гиромотороп гироскопов, горизонтирова- ние гироплатформ, грубую выставку обеих гироплатформ в направлении на Север, перевод курсовых гироскопов обеих гироплатформ в режим датчиков угловых скоростей, согласно изобретению, дополнительно до перевода курсовых гироскопов обеих гироплатформ в режим датчиков угловых скоростей, осуществляют разворот первой гироплатформы до положения, при котором вектор кинетического момента первого курсового гироскопа образует угол 90 градусов с направлением на Север, определенным при грубой выставке, после перевода курсовых гироскопов обеих гироплатформ в режим датчиков угловых скоростей, производят совместный поворот первой и второй гироплатформ на угол 10°, реверс и возвращение в исходное положение, формируют сигналы,пропорциональные сумме гироскопических моментов курсовых гироскопов первой и второй гироплатформ в начале и конце движения гироплатформ и в момент реверса. Формируют сигнал, пропорциональный углу между направлениями на Север и биссектрисой угла, образованного векторами кинетических моментов курсо00СА) СЛ ь 00
ю
вых гироскопов, осуществляют точное приведение в азимуте биссектрисы угла между векторами кинетических моментов курсовых гироскопов путем подачи сигнала, пропорционального углу между направлением на Север и биссектрисой угла, образованного векторами кинетических моментов курсовых гироскопов, на двигатели отработки первой и второй гироплатформ.
Наиболее близким по технической сущности к предлагаемому является устройство автоматической выставки по курсу ИНС методом физического гирокомпасирования, содержащее две гироплатформы, каждая с курсовым гироскопом, системой горизонти- рования и следящей системой отработки по курсу, и индукционный датчик. Достоинством такого устройства является резервирование гироплатформ, однако, и ему присущи аналогичные недостатки, т.е. низкая точность и большое время выставки.
Целью изобретения в части устройства является повышение точности автоматической выставки по курсу.
Указанная цель достигается за счет того, что в устройство автоматической выставки по курсу инерциальной системы, содержащее первую и вторую гироплатформы, на каждой из которых установлены соответственно первый и второй двигатели отработки, выход которых механически связан соответственно с первой и второй гироплатформами, первый и второй датчики положения гироплатформ, первый и второй датчики курса, выходы которых механически связаны соответственно с первой и второй гироплатформами, введены последовательно соединенные первый за- датчик постоянного сигнала, первый сумматор, второй вход которого связан с выходом первого датчика положения гироплатформы, выход которого связан со входом первого Двигателя отработки, последовательно соединенные второй задатчик постоянного сигнала, второй ключ и второй сумматор, второй вход которого соединен с выходом второго датчика положения гироплатформы, а выход - со входом второго двигателя отработки, блок управления ключами, последовательно соединенные третий задатчик постоянного сигнала, третий ключ, блок определения отклонений системы от направления на Север, выход которого соединен с третьими входами первого и второго сумматоров, четвертые йходы которого связаны с выходом датчика магнитного курса, а пятый - с выходом третьего ключа, второй выход которого связан с первым входом блока управления ключами, второй выход которого связан со вторыми входами перво5
0
0
го и третьего ключей, последовательно соединенные третий сумматор и блок согласования, выход которого связан со вторым входом блока определения отключения сис- темы от направления на Север, четвертый и пятый ключи, первые входы которых связаны с третьим входом блока управления ключами, а вторые - с выходом курсовых гироскопов первой и второй гироплатформ, выходы четвертого и пятого ключей связаны соответственно с первым и вторым входами третьего сумматора и со входами курсовых гироскопов первой и второй гироплатформ.
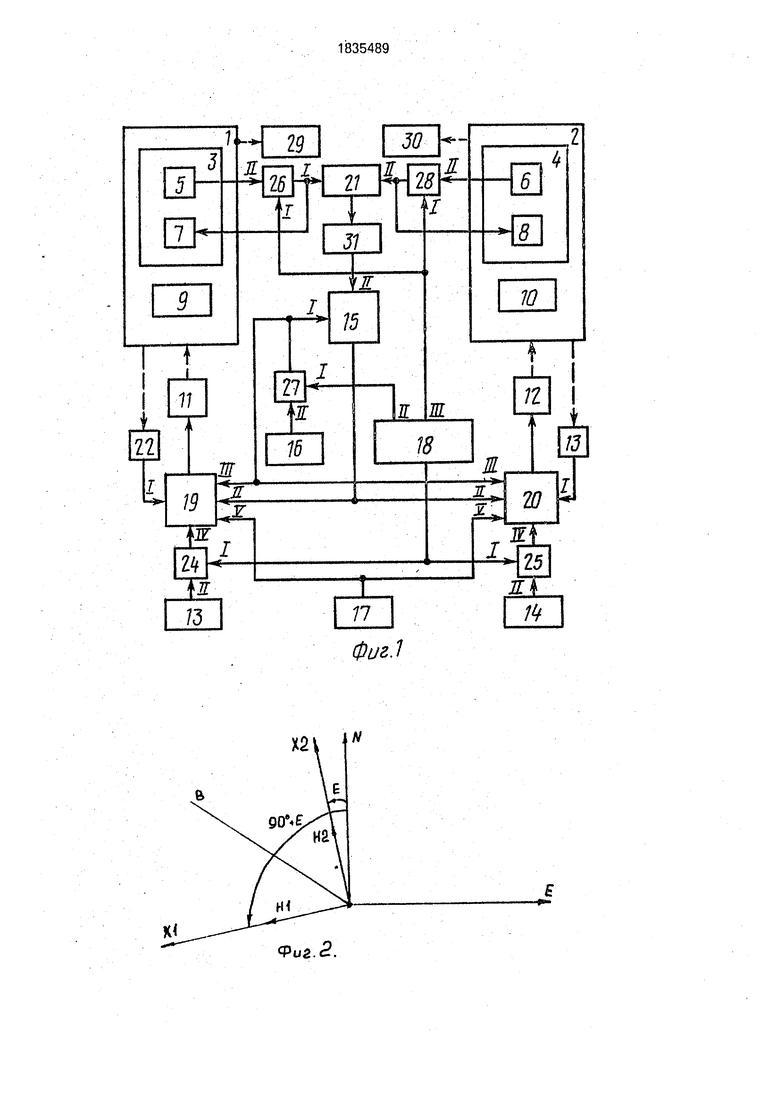
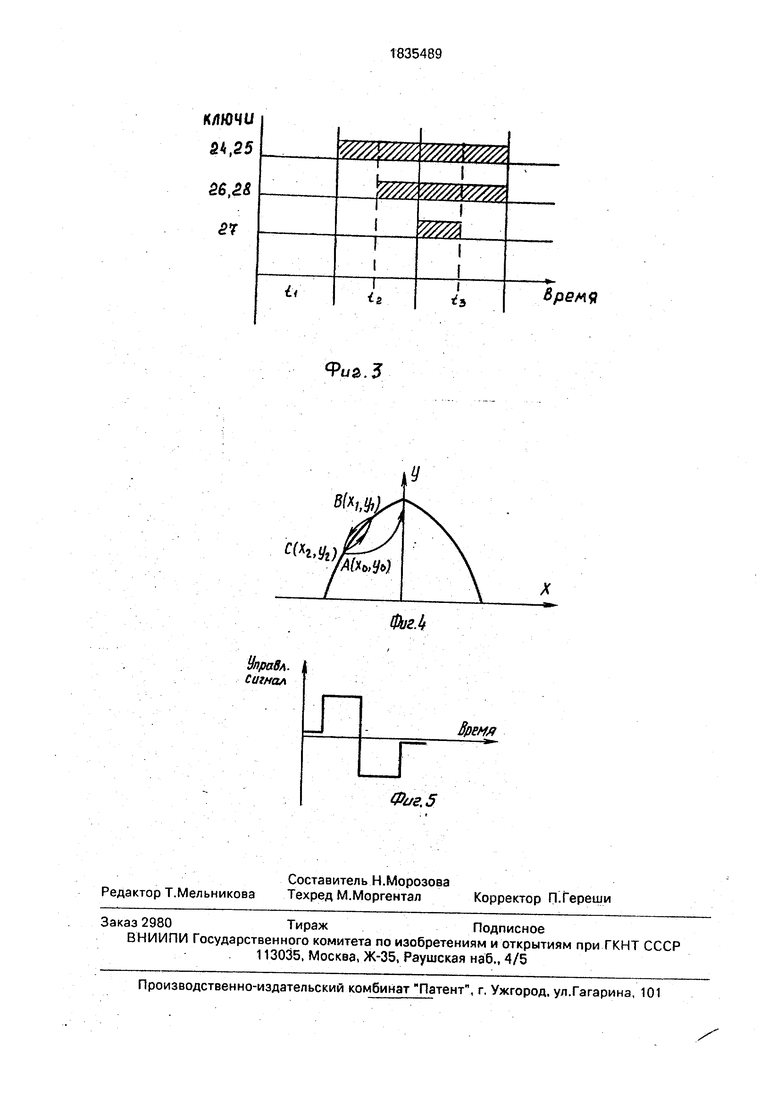
На фиг. 1 представлена функциональная схема предлагаемого устройства; на фиг.2 - системы координат; на фиг.З - диаграмма работы ключей; на фиг.4 -экстремальная характеристика системы; на фиг,5 - график управляющего сигнала.
Предлагаемое устройство представляет собой инерциальную систему, содержащую первую 1 и вторую 2 гироплатформы, на каждой из которых установлены соответственно первый 3 и второй 4 курсовые гироскопы, включающие в себя соответственно первый 5 и второй 6 датчики, первый 7 и второй 8 датчики моментов, первая 9 и вторая.10 системы горизонтирования. Данное устройство содержит первый 11 и второй 12 двигатели отработки, предназначенные для отработки гироплатформ по курсу, первый 13 и второй 1-4 задатчики постоянного сигнала, блок определения отклонения системы от направления на Север 15, третий задатчик постоянного сигнала 16, датчик магнитного курса 17, блок управления ключами 18, суммирующие устройства- первое 19, второе 20, третье 21, первый 22 и второй 23 датчики положения, ключи- первый 24, второй 25, третий 2(5, четвертый 27, пятый 28, а также содержит первый 29 и второй 30 сельсин-датчики курса и согласующее устройство 31.
Выходы первого 13 и второго 14 задат- чиков постоянного сигнала электрически связаны со вторыми входами соответственно первого 24 и второго 25 ключей, выходы которых электрически связаны с четвертыми входами соответственно первого 20 и второго 21 суммирующих устройств, вторые входы этих суммирующих устройств связаны электрически с выходами соответственно первого 22 и второго 23 датчиков положения, причем выходы этих суммирующих устройств связаны электрически со входами соответственно первого 11 и второго 12 двигателей отработки, выходы которых механически связаны соответственно с первой 1 и второй 2 гироплатформами, с этими гироплатформами механически связаны со5
0
5
ответственно входы первого 22 и второго 23 датчиков положения и входы первого 29 и второго 30 сельсин-датчиков курса. Выход первого датчика углов 5 электрически связан со вторым входом третьего ключа 26, первый вход которого электрически связан с третьим входом блока управления ключами 18, а выход одновременно электрически связан со входом первого датчика моментов 7 и с первым входом третьего суммирующе- го устройства 21, выход которого электрически связан со входом блока согласования 31, выход последнего электрически связан со вторым входом блока определения отклонения системы от направления на Север 15, выход этого вычислительного устройства 15 одновременно электрически связан со вторыми входами первого 19 и второго 20 суммирующих устройств, выход второго датчика углов 6 электрически связан со вто- рым входом пятого ключа 28, первый вход которого электрически связан с третьим выходом блока управления ключами 18, а выход одновременно электрически связан со входом второго датчика моментов 8 и с пер- вым входом третьего суммирующего устройства 21. Первый выход блока управления ключами 18 одновременно электрически связан с первыми входами первого 2А и второго 25 ключей, второй выход блока уп- равления ключами 18 электрически связан с первым входом четвертого ключа 27, выход этого ключа 27 одновременно электрически связан с третьими входами первого 19 и второго 20 суммирующих устройств и с первым входом блока определения отклонения системы от направления на Север 15, а второй вход четвертого ключа 27 электрически связан с выходом третьего задатчика постоянного сигнала 16, пятые входы перво- го 19 и второго 20 суммирующих устройств одновременно электрически связаны с выходом датчика магнитного курса 17.
Предлагаемое устройство (фиг.1) работает в двух режимах: режим грубой вы- ставки, режим точной выставки,
Режим грубой выставки. При включении системы происходит разгон гиромото- ров гироскопов гироплатформ 1 и 2, горизонтирование этих гироплатформ с по- мощью соответственно первой 9 и второй 10 систем горизонтирования. В этом режиме на выходах ключей 24, 25, 26, 27, 28 сигналы отсутствуют. Сигнал с выхода датчика магнитного курса 17, пропорциональ- ный магнитному курсу, поступает на пятые входы первого 19 и второго 20 суммирующих устройств, с выходов этих суммирующих устройств сигнал поступает на входы соответственно первого 11 и второго двигателей отработки. Двигатели отработки вызывают разворот соответственно первой 1 и второй 2 гироплатформ в азимуте, что приводит к появлению сигналов на выходах соответственно первого 22 и второго 23 датчиков положения. Сигналы обратной связи с выходЬв первого 22 и второго 23 датчиков положения поступают на первые входы соответственно первого 19 и второго 20 суммирующих устройств. По окончании отработки сигнала с индукционного датчика 17 оси гироплатформ образуют с направлением на Север одинаковый угол, определяемый точностью датчика магнитного курса 17.
После выставки осей гироплатформ в направлении на Север по сигналу с магнитного курса 17с первого выхода блока управления ключами 18 поступает сигнал на первые входы первого 24 и второго 25 ключей, эти ключи срабатывают (см. фиг.З). Сигналы с выходов задатчиков постоянных сигналов 13 и 14 через сработавшие ключи 24 и 25 поступают на четвертые входы соответственно первого 19 и второго 20 суммирующих устройств, с выходов этих суммирующих устройств сигнал поступает на входы соответственно первого 11 и второго 12 двигателей отработки. На датчиках 5 и 6 возникают сигналы от реакции курсовых гироскопов 3 и 4 на горизонтальную составляющую угловой скорости вращения Земли и на возмущающие моменты, обуславливающие собственные скорости дрейфов курсовых гироскопов:
М Мм + МВ1,
М Мг2 + Мв2,
где МГ1, МГ2 - моменты, возникающие при взаимодействии курсовых гироскопов 3 и 4 с горизонтальной составляющей угловой скорости вращения Земли,
МВ1, МВ2 - возмущающие моменты, действующие на первый 3 и второй 4 курсовые гироскопы.
Режим точной выставки. В режиме точной выставки сигнал со второго выхода блока управления ключами 18 поступает на первый вход четвертого ключа 27. при этом ключ 27 срабатывает и сигнал с выхода источника управляющего сигнала 16 через сработавший ключ 27 поступает одновременно на третьи входы первого 19 и второго 20 суммирующих устройств, с выходов этих суммирующих устройств сигнал поступает на входы соответственно первого 11 и второго 12 двигателей отработки. Двигатели отработки вызывают разворот соответственно первой 1 и второй 2 гироплатформ в азимуте, что приводит к появлению сигналов на выходах соответственно первого 22 и еторого 23 датчиков положения. Сигналы обратной связи с выходов первого 22 и второго 23 датчиков положения поступают на первые входы соответственно первого 19 и второго 20 суммирующих устройств. В результате обработки управляющего сигнала двигателями отработки 11 и 12 гироплатформы 1 и 2, оси которых образуют между собой угол 90 градусов, поворачиваются в азимуте на угол 10 градусов, а затем возвращаются в исходное положение. В процессе движения гироплатформ на датчиках углов 5 и 6 первого 3 и второго 4 гироскопов, переведенных в режим датчиков угловых скоростей, возникают сигналы от реакции курсовых ги- роскопов 3 и 4 на горизонтальную составляющую угловой скорости вращения Земли и на возмущающие моменты, обуславливающие собственные скорости дрейфов курсовых гироскопов, Сигналы с выходов первого 5 и второго 6 датчиков углов через соответ- ствующие ключи 26 и 28 поступают соответственно на первый и второй входы третьего суммирующего устройства 21, на выходе которого возникает сигнал суммы моментов. Сигнал с выхода третьего суммирующего устройства 21 поступает на вход блока согласования 31, на выходе которого возникает сигнал.
Y M/m cosX + p.
где m vTH Q коэффициент согласующего устройства 31:
р {wi + wa) H/m.
Так как скорости дрейфов гироскопов wi и wa медленно меняющиеся сигналы, то во время процесса выставки их можно считать постоянными.
Сигнал с выхода блока согласования 31 поступает на второй блок определения от- клонения системы от направления на Север 15. Изменение этого сигнала в зависимости от угла X, образованного биссектрисой угла между осями гироплатформ 1 и 2 и направлением на Север, будет происходить по за- кону косинуса. Так как точность выставки осей гироплатформ на Север определяется погрешностью датчика 17, не превышаю щей 1,0°, если для индукционного датчика ИД-6 ошибка равна 0,75°, то угол X - 45Р+ Е будет лежать в интервале 44°, 46°. При поступлении первого импульса управляющего сиг«ала(см. фиг.5) с выхода третьего задат- чика постоянного сигнала 16 на двигатели отработки 11 и 12 соответственно через ключ 27 и суммирующие устройства 19 и 20, а также через ключ 27 на первый вход блока 15 определения отклонения системы от направления на Север 15. запоминается сигнал YO (см. фиг.4), а двигатели отработки 11
5 0 5 0 5
0
5
0 5
0
5
и 12 осуществляют поворот гироплатформ 1 и 2 на угол (-10 )°. Затем осуществляется разворот двигателей отработки (импульс 2 управляющего сигнала (см. фиг.5). В момент реверса под действием второго импульса управляющего сигнала в блоке 15 осуществляется измерение сигнала YI (см.фиг.4), формирование сигнала.
Ai Yi-Yo
и запоминание сигналов YI и А1. Двигатели отработки 11 и 12 возвращают гироплатформы 1 и 2 в исходное положение и в момент поступления с источника управляемого сигнала 17 через четвертый ключ 27 на первый вход блока 15 импульса 3(см.фиг,5) управляющего сигнала в блоке 15 осуществляете1 измерение сигнала Ya (см.фиг. 4), формирование сигнала A2 Y2-Yi
После этого сигнал на втором выходе блока 18 исчезает, при этом ключ 27 срабатывает (см. фиг.З) и сигнал с выхода задат- чика постоянного сигнала 16 не поступает на входы блока 15 и на входы первого 19 и второго 20 суммирующих устройств. В блоке 15 по запомненным значениям AI и.Д.2 по алгоритму (22) осуществляется вычислением угла, образованного биссектрисой угла между осями гироплатформ 1 и 2, развернутых между собой на угол 90 градусов, и направлением на Север. Сигнал с выхода блока 15 поступает на вторые входы первого 19 и второго 20 суммирующих устройств, с выходов этих суммирующих устройств сигнал поступает на входы соответственно первого 11 и второго 12 двигателей отработки, которые вызывают разворот соответственно первой 1 и второй 2 гироплатформы в азимуте, что приводит к появлению сигналов на выходах соответственно первого 22 и второго 23 датчиков положения. Сигналы обратной связи с выходов первого 22, второго 23 датчиков положения поступают на первые входы соответственно первого 19 и второго 20 суммирующих устройств В результате обработки сигнала с выхода блока 15 осуществляется точное приведение биссектрисы угла между осями гироплатформ 1 и 2 к направлению на Север. На этом заканчивается режим точной выставки. Формула изобретения 1. Способ автоматической выставки по курсу инерциальной навигационной системы, включающий в себя разгон гиромоторов гироскопов, горизонтирование платформ, грубую выставку обеих гироплатформ в направлении на Север, перевод курсовых гироскопов обеих гироплатформ в режим датчиков угловых скоростей, отличающии с я тем. что, с целью повышения точности автоматической выставки по курсу инерци- альной навигационной системы, дополнительно до перевода курсовых гироскопов обеих гироплатформ в режим датчиков угло- вых скоростей, осуществляют разворот первой гироплатформы до положения, при котором вектор кинетического момента первого курсового гироскопа образует угол 90° с направлением на Север, определенным при грубой выставке после перевода курсовых гироскопов обеих гироплатформ в режим датчиков угловых скоростей, производят совместный поворот первой и второй гироплатформ на угол -10°, реверс и возвращение в исходное положение, формируют сигналы, пропорциональные сумме гироскопических моментов курсовых гироскопов первой и второй гироплатформ, в начале и конце движения гироплатформ и в момент реверса формируют сигнал, пропорциональный углу между направлением на Север и биссектрисой угла, образованного векторами кинетических моментов курсовых гироскопов, осуществляют точное при- ведение в азимуте биссектрисы угла между векторами кинетических моментов курсовых гироскопов путем подачи сигнала, пропорционального углу между направлением на Север и биссектрисой угла, образованно- го векторами кинетических моментов курсовых гироскопов, на двигатели отработки первой и второй гироплатформ.
&
Фиг.2.
фиг.1
ФиъЗ
5(х
С(г,Уг)
Управл. Сигнал
Время
| Авторское свидетельство СССР №1655191,601 С21/12.-Т991. |
