Изобретение относится к усовершенствованию электромеханических исполнительных органов системы ориентации космических аппаратов (КА) с использованием двигателей-маховиков.
Двигатель-маховик является одним из основных элементов систем ориентации. С помощью его генерируются управляющие моменты для получения требуемой ориентации КА. Известные в настоящее время электромеханические исполнительные органы на основе двигателей--маховиков состоят из 3-х двигателей, установленных на жестком основании. Оси вращения их образуют ортогональную систему координат и совпадают с главными осевыми моментами инерции КА (см., например Раушенбах Б.В., Токарь Е.Н. Управление ориентацией космических аппаратов. Наука, 1974 г., Л.И.Каргу. Системы угловой стабилизации космических аппаратов. М.: Машиностроение, 1973).
Все известные электромеханические исполнительные органы на основе двигателей-маховиков имеют общий недостаток: для использования в 3-хосной системе ориентации необходимо (при отсутствии дублирования) иметь 3 двигателя-маховика.
Целью предлагаемого изобретения является устранение вышеуказанного недостатка. Указанная цель достигается за счет установки на корпусе двигателя-маховика электромеханического исполнительного органа датчиков момента, оси которых перпендикулярны оси вращения маховой массы, при этом двигатель-маховик помещен в сферический корпус с фиксаторами, расположенными по ортогональный осям корпуса электромеханического исполнительного органа, а двигатель-маховик установлен с возможностью перемещения и может располагаться по трем взаимно перпендикулярным направлениям.
Сущность изобретения поясняется чертежами, где:
- на фиг.1 показан общий вид предлагаемого трехосного электромеханического исполнительного органа на базе одного двигателя-маховика;
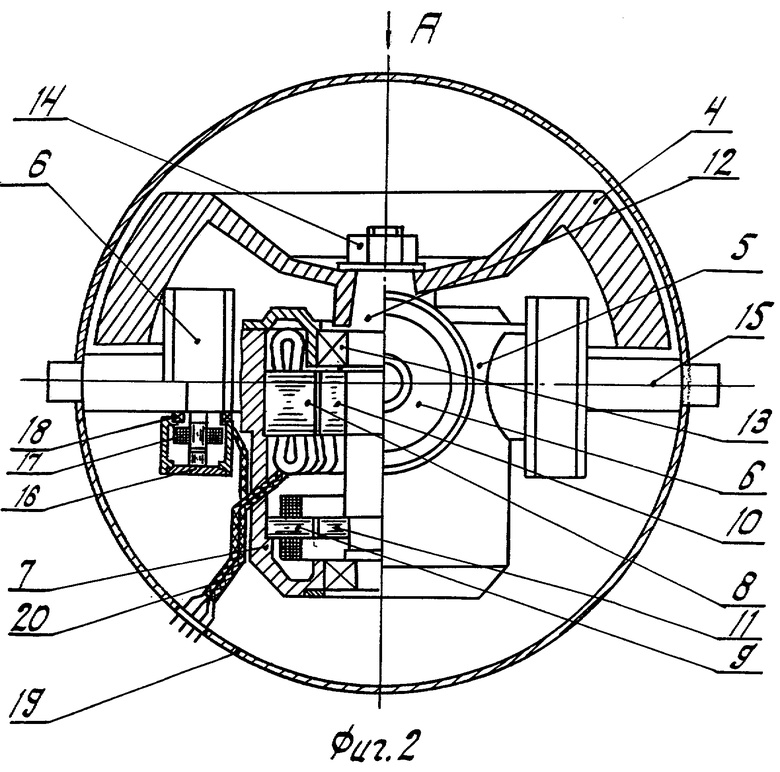
- на фиг.2 показана конструкция двигателя-маховика;
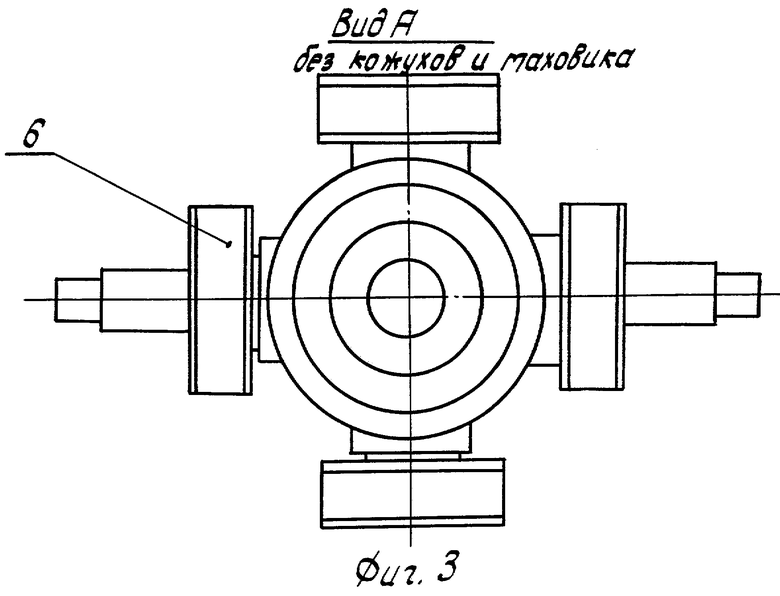
- на фиг.3 показан вид А (конструкция дана без кожуха и маховика);
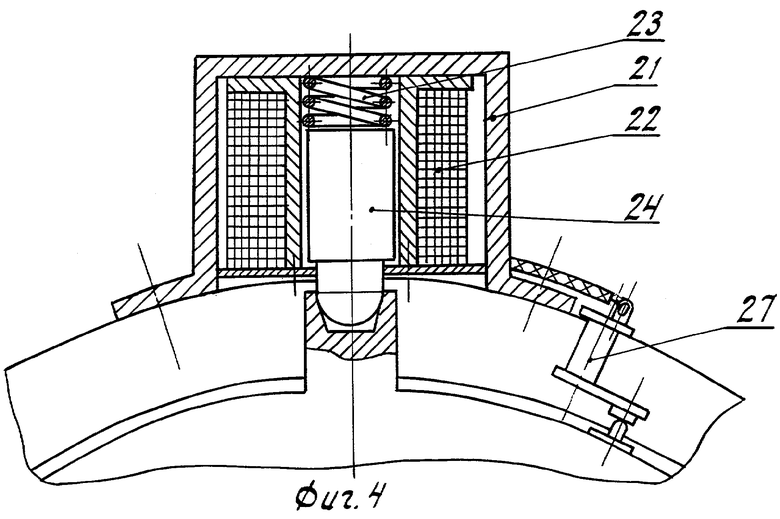
- на фиг.4 показана конструкция фиксаторов;
- на фиг.5 структурная схема электромеханического исполнительного органа.
Показанный на фиг.1 предлагаемый трехосный электромеханический исполнительный орган состоит из двигателя-маховика 1, сферического корпуса 2 и фиксаторов 3.
Конструкция двигателя-маховика (фиг.2) состоит из маховика 4, электродвигателя 5 и датчика момента 6.
Электродвигатель 5 состоит из корпуса 7, в котором расположены статоры электродвигателя 8 и тахогенератора 9. Пакет ротора электродвигателя 10 и пакет ротора тахогенератора 11 размещены на валу 12, установленном в корпусе 7, в подшипниках 13.
Маховик 4 жестко связан с валом 12 посредством посадки этого маховика на конусную часть вала с затяжной гайкой 14.
На цапфах 15 корпуса 7 установлены четыре датчика момента 6. Датчики момента 6 состоят из ротора 16 и статора 17. Ротор датчика момента установлен на подшипниках 18, статор закреплен неподвижно на цапфе 15.
Датчики момента 6 расположены симметрично относительно осей двигатели для обеспечения статической балансировки.
Конструкция двигателя-маховика закрыта герметичным кожухом 19. Цапфы 15 двигателя-маховика 1 входят в кольцевые пазы 25 корпуса 2 (см. сечение А-А, фиг.1), которые определяют направление прецессионного движения двигателя-маховика 1.
Сферический корпус 2 электромеханического исполнительного органа имеет три кольцевых паза 25 (фиг.1), оси которых образуют ортогональную систему координат, жестко связанную через посадочные плоскости корпуса электромеханического исполнительного устройства 26 и корпусом космического аппарата (не показан).
На корпусе 2 расположены три пары фиксаторов 3. Конструкция фиксатора (фиг.4) состоит из корпуса фиксатора 21, катушки 22, пружины 23, штока фиксатора 24 и контактной пары 27.
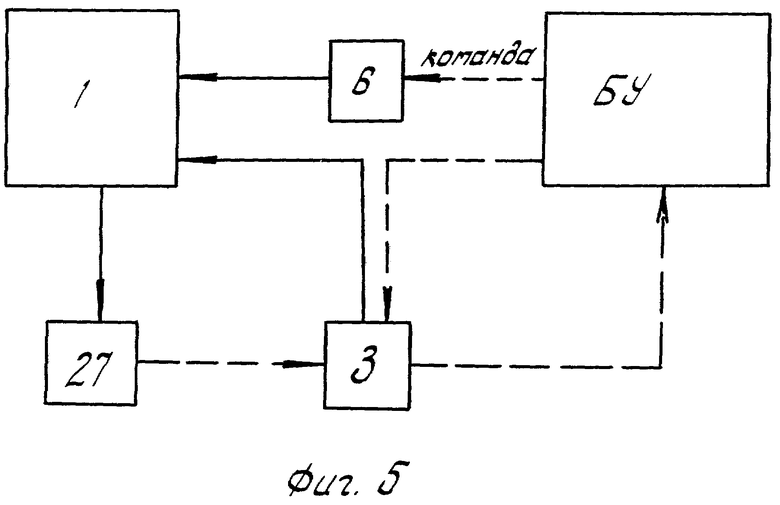
На структурной схеме электромеханического исполнительного органа, приведенной на фиг.5, показаны двигатель-маховик 1, датчики моментов 6, фиксатор 3, контактная пара 27 и блок управления БУ.
Цифровые обозначения, приведенные на структурной схеме, соответствуют цифровым обозначениям на фиг.1, 2, 3 и 4. Сплошной линией на чертеже показаны механические связи, штриховой линией - электрические связи.
Генерирование управляющего момента относительно оси вращения двигателя-маховика 1 осуществляется по общеизвестному принципу.
Трехосная ориентация обеспечивается за счет поочередной установки двигателя-маховика 1 в сферическом корпусе 2 по трем ортогональным положениям. В соответствии с прецессионной теорией при наличии момента в направлении, перпендикулярном оси вращения маховика, двигатель-маховик 1 займет новое положение

Наличие момента М в формуле (1) обеспечивается при подаче питания на датчики моментов, установленные на цапфы 15 корпуса двигателя-маховика 1.
При срабатывании фиксатора 3 двигатель-маховик 1 получает свободу углового перемещения и прецессирует в новое положение (на <90°), где происходит его фиксация как показано на фиг.4. Работа фиксаторов регламентируется контактными парами 27, один контакт которой установлен на двигателе-маховике №1, а другой крепится к корпусу.
Направление прецессионного движения двигателя-маховика определяется соответствующими командами логическо-преобразующего блока системы ориентации космического аппарата.
Питание двигателя-маховика 1 и датчика моментов 6 осуществляется через жгут 20 (см.фиг.2).
Работа исполнительного органа поясняется структурной схемой, приведенной на фиг.5.
По команде с блока управления (БУ) фиксатор 3 разарретирует двигатель-маховик (1), а датчик момента (6) создает момент, в результате чего в соответствии с формулой (1) разарретированный двигатель-маховик (1) начинает прецессировать по пазу сферического корпуса до замыкания контактной пары 27. При повороте двигателя-маховика на 90° срабатывают контактные пары 27 и электрический сигнал поступает на фиксаторы (3), которые сразу арретируют этот двигатель-маховик (1). При поступлении очередной команды процесс переориентации двигателя-маховика повторяется и он может занимать любое из трех положений, при этом конструкция корпуса с пазами не регламентирует порядок переориентации.
По мнению авторов в предлагаемом исполнительном органе оригинальным является:
1. Создание трехосной системы ориентации на базе одного двигателя-маховика, т.е. использование одного двигателя-маховика вместо трех и, как результат, сокращение массы и габаритов исполнительного органа не менее чем на 50%.
2. Отпадает необходимость во втором контуре разгрузочных реактивных двигателей, т.к. при насыщении двигателя-маховика (достижение максимальной угловой скорости) имеется возможность с помощью тех же датчиков моментов изменить направление вектора кинетического момента на противоположное.
3. Увеличение ресурса системы ориентации, который лимитируется объемом рабочего тела (газа, горючего) реактивных двигателей.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ИСПОЛНИТЕЛЬНЫЙ ОРГАН КОСМИЧЕСКОГО АППАРАТА | 1979 |
|
SU1839918A1 |
| Способ разгрузки инерциальных исполнительных органов космического аппарата и устройство для реализации способа | 2023 |
|
RU2829196C1 |
| Способ трехосной стабилизации экранированного космического аппарата с центрально-симметричным распределением заряда электростатической защиты и устройство для его реализации | 2024 |
|
RU2841573C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ИСПОЛНИТЕЛЬНЫЙ ОРГАН | 1982 |
|
SU1839925A1 |
| СИЛОВОЙ ДВУХСТЕПЕННЫЙ УПРАВЛЯЮЩИЙ ГИРОСКОП | 1984 |
|
SU1839931A1 |
| Способ ориентации околоземного орбитального космического аппарата | 2021 |
|
RU2779658C1 |
| Способ разгрузки инерциальных исполнительных органов космического аппарата и устройство для реализации способа | 2024 |
|
RU2834705C1 |
| Способ ориентации космического аппарата и устройство для реализации способа | 2016 |
|
RU2618664C1 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОСМИЧЕСКОГО АППАРАТА С УПРАВЛЯЕМОЙ ОРИЕНТАЦИЕЙ | 2017 |
|
RU2669481C1 |
| ГИРОСТАБИЛИЗАТОР | 1978 |
|
SU1840380A1 |
Изобретение относится к области оборудования космических аппаратов. Исполнительный орган содержит корпус, электродвигатель с маховиком, тахогенератор и блок управления прецессионным движением двигателя-маховика, связанный с датчиками моментов. Корпус выполнен сферической формы с тремя пересекающимися кольцевыми пазами. Двигатель-маховик установлен в корпусе посредством цапф. Датчики моментов установлены на цапфах. В местах пересечения пазов корпуса установлены фиксаторы, электрически связанные с блоком управления. Технический результат - уменьшение массы и габаритов. 5 ил.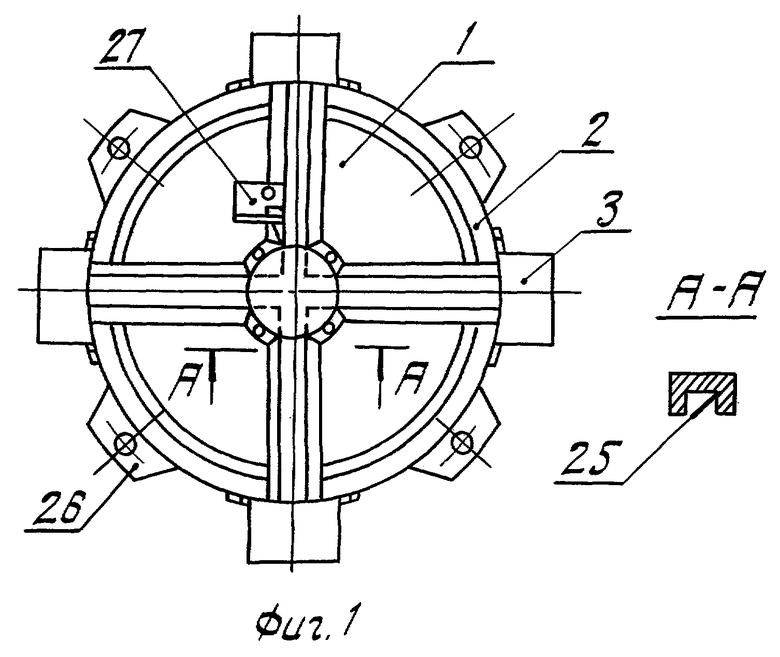
Электромеханический исполнительный орган системы ориентации и стабилизации космического аппарата, содержащий связанный с корпусом электродвигатель с установленным на его валу маковиком, тахогенератор и датчики моментов, связанные с блоком управления прецессионного движения двигателя-маховика, отличающийся тем, что, с целью уменьшения массы и габаритов устройства путем обеспечения трехосной ориентации при помощи одного двигателя-маховика, в нем корпус выполнен сферической формы с тремя пересекающимися кольцевыми пазами, лежащими во взаимно перпендикулярных плоскостях, а двигатель-маховик установлен в корпусе посредством цапф, взаимодействующих с пазами корпуса, при этом датчики моментов установлены на цапфах с осью вращения, перпендикулярной оси вращения маховика, а исполнительный орган снабжен фиксаторами, установленными на корпусе в местах пересечения пазов и электрически связанными с блоком управления прецессионного движения двигателя-маховика.
| Л.И.Каргу | |||
| Системы угловой стабилизации космических аппаратов, М.: Машиностроение, 1973 год, стр.62-63. |

