Предлагаемое изобретение относится преимущественно к пневматическим системам автоматического управления.
Известны пневматические системы управления механическими устройствами, например "Унифицированная пневматическая система программного управления" 000-6836, выпускаемая московским заводом "Тизприбор".
Эта система содержит блоки универсальной логики, блоки обегания, блоки функциональных усилителей, блок задержки, устройство согласования с элементами адаптации, блок элементов сравнения, блок задатчиков и наборное поле. Набрав программу на наборном поле, можно осуществить управление достаточно сложными устройствами, содержащими пневмоцилиндры. Однако эта система сложна, громоздка и в качестве системы управления станком намотки имеет функциональную избыточность. Кроме того, эта система не имеет электрических средств управления.
Известна также система управления станком намотки.
Эта система содержит исполнительные механизмы в виде пневмоцилиндров, связанные с ними распределители, датчики исходных положений штоков пневмоцилиндров, датчики рабочих положений штоков пневмоцилиндров, четыре элемента И, четыре элемента ИЛИ, пусковые элементы ручного управления, муфту сцепления, электропневмопреобразователь, пневмоэлектропреобразователи, электромагнитное реле с двумя нормально замкнутыми и двумя нормально разомкнутыми контактами, счетчик импульсов, фотоизлучатель, фотоприемник, усилители, схему Отрицания И, элемент Отрицания, три элемента Запрет, два триггера.
Однако эта система сложна, и в результате эксплуатации выявилась ее низкая надежность. И как следствие реальная производительность ее оказалась ниже ожидаемой.
Целью предлагаемого изобретения является повышение производительности системы управления путем ее упрощения и сокращения числа тактов.
Это достигается следующим образом.
В систему автоматического управления станком намотки, содержащую исполнительные механизмы в виде пневмоцилиндров, связанные с ними распределители, датчики исходных положений штоков пневмоцилиндров, датчика рабочих положений штоков пневмоцилиндров, четыре элемента И, четыре элемента ИЛИ, два пусковых элемента ручного управления, муфту сцепления, электропневмопреобразователь, пневмоэлектропреобразователь, электромагнитное реле с двумя нормально замкнутыми и двумя нормально разомкнутыми контактами, счетчик импульсов, соединенный с фотоприемником и через один из нормально разомкнутых контактов с фотоизлучателем, причем фотоприемник и фотоизлучатель имеют оптическую связь через перфорированный, вращающийся на валу диск, параллельно электрическому контакту пневмоэлектропреоразователя подключен второй нормально разомкнутый контакт электромагнитного реле, выход пневмоэлектропреобразователя соединен через нормально замкнутый выходной контакт счетчика импульсов с катушкой электромагнитного реле, первый нормально замкнутый контакт электромагнитного реле соединен со входом электропневмопреобразователя, входы первого элемента И соединены с датчиками рабочих положений штоков пневмоцилиндров заправочного валика, прижимного валика позиции намотки, прижимного валика позиции домотки и перемещения центров, второй нормально замкнутый контакт электромагнитного реле соединен с муфтой сцепления, согласно изобретению, в эту систему дополнительно введен элемент памяти. При этом датчик исходного положения штока цилиндра перемещения ножа соединен со входом рабочего положения распределителя пневмоцилиндра съема изделий и выходом пневмоэлектропреобразователя. Датчик рабочего положения штока пневмоцилиндра съема изделий соединен с входом исходного положения распределителя пневмоцилиндра съема изделий, с входом "Запись" элемента памяти и через первый элемент ИЛИ - с входом рабочего положения распределителя пневмоцилиндра перемещения ножа. Входы второго элемента И связаны с датчиком рабочего положения штока пневмоцилиндра управления пневмомуфтой и с датчиком рабочего положения штока пневмоцилиндра фиксации карусели, а его выход - с входом рабочего положения распределителя пневмоцилиндра поворота карусели, вход исходного положения которого соединен с датчиком исходного положения штока пневмоцилиндра заправочного валика. Датчик рабочего положения штока пневмоцилиндра фиксации карусели соединен также и с входом "Сброс" элемента памяти. Выход электропневмопреобразователя соединен с входом "Считывание" элемента памяти. Входы третьего элемента И соединены с выходом элемента памяти и с датчиком исходного положения штока пневмоцилиндра съема изделий, а его выход - с входом рабочего положения распределителя пневмоцилиндров прижима центров и прижимного валика на позиции домотки и через второй элемент ИЛИ - с входом рабочего положения распределителя пневмоцилиндров заправочного валика и прижимного валика на позиции намотки, вход исходного положения которого соединен с выходом третьего элемента ИЛИ. Выход первого пускового элемента соединен с одним из входов первого и второго элементов ИЛИ. Датчик рабочего положения штока пневмоцилиндра поворота карусели соединен с входом исходного положения распределителя пневмоцилиндров подачи центров и прижимного валика на позиции домотки, с одним из входов третьего и четвертого элементов ИЛИ и с входом исходного положения штока пневмоцилиндра управления пневмомуфтой. Второй пусковой элемент соединен с одним из входов третьего и четвертого элементов ИЛИ. Выход четвертого элемента ИЛИ соединен с входом исходного положения распределителя пневмоцилиндра перемещения ножа. Выход первого элемента И соединен с входом рабочего положения распределителя пневмоцилиндра управления пневмомуфтой и одним из входов четвертого элемента И, другой вход которого соединен с датчиком исходного положения штока пневмоцилиндра поворота карусели, а его выход соединен с управляющим входом распределителя пневмоцилиндра фиксации карусели.
Такое решение позволяет достичь поставленной цели.
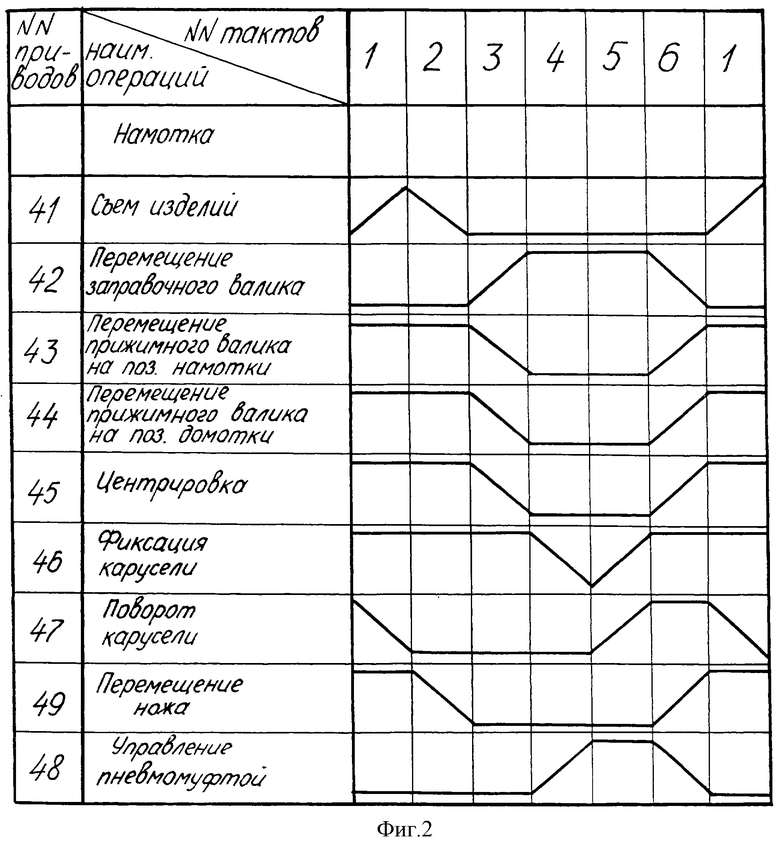
На фиг.1 приведена функциональная схема, на фиг.2 - циклограмма работы пневмоцилиндров системы автоматического управления станком намотки.
Система автоматического управления станком намотки содержит датчики исходных положений штоков пневмоцилиндров съема изделий 1, перемещения ножа 2, заправочного валика 3, поворота карусели 4, датчики рабочих положений штоков пневмоцилиндров съема изделий 5, управления пневмомуфтой 6, фиксации карусели 7, поворота карусели 8, подачи центров 9, прижимного валика на позиции домотки 10, прижимного валика на позиции намотки 11, заправочного валика 12, фотоприемника 13, счетчик импульсов 14, фотоизлучатель 15, обмотку электромагнитного реле 16, первый нормально разомкнутый контакт электромагнитного реле 17, второй нормально разомкнутый контакт электромагнитного реле 18, первый 19 и второй 20 нормально замкнутые контакты электромагнитного реле, пневмоэлектропреобразователь 21, элемент памяти 22, электропневмопреобразователь 23, первый элемент ИЛИ 24, второй элемент ИЛИ 25, третий элемент ИЛИ 26, четвертый элемент ИЛИ 27, первый элемент И 28, второй элемент И 29, третий элемент И 30, четвертый элемент И 31, первый пусковой элемент 32, второй пусковой элемент 33, распределитель пневмоцилиндра съема изделий 34, распределитель пневмоцилиндров заправочного валика и прижимного валика на позиции намотки 35, распределитель пневмоцилиндров подачи центров и прижимного валика на позиции домотки 36, распределитель пневмоцилиндра фиксации карусели 37, распределитель пневмоцилиндра поворота карусели 38, распределитель пневмоцилиндра управления пневмомуфтой 39, распределитель пневмоцилиндра перемещения ножа 40, пневмоцилиндр съема изделий 41, пневмоцилиндр заправочного валика 42, два пневмоцилиндра прижимного валика на позиции намотки 43 (показан один), два пневмоцилиндра перемещения центров 44 (показан один), два пневмоцилиндра прижимного валика на позиции домотки 45 (показан один), пневмоцилиндр фиксации карусели 46, пневмоцилиндр поворота карусели 47, пневмоцилиндр управления пневмомуфтой 48, пневмоцилиндр перемещения ножа 49, муфту сцепления 50.
Система автоматического управления станком намотки работает следующим образом. Перед началом работы систему переводят в наладочный режим (элемент управления на схеме не показан). Затем включают первый пусковой элемент 32. В результате чего штоки пневмоцилиндров 42, 43, 47 меняют свое положение, обеспечивая заправку полотна. После заправки полотна включают второй пусковой элемент 33 - штоки пневмоцилиндров 42, 43, 47 приходят в исходное положение. Подают электропитание на систему управления и электродвигатель (на схеме не показан). Переводят систему управления в автоматический режим работы. При этом сигнал с датчика 2 поступает одновременно на вход рабочего положения распределителя 34 и на пневмоэлектропреобразователь 21. Распределитель 34, переключаясь, переводит шток пневмоцилиндра в рабочее положение, в результате чего удаляется изделие от предыдущего цикла, и датчик 5 выдает сигнал на вход "Запись" элемента памяти 22, на вход исходного положения распределителя 34 и через первый элемент ИЛИ 24 на вход рабочего положения распределителя 40. Пневмоэлектропреобразователь 21 своим электрическим контактом через нормально замкнутый контакт счетчика 14 подает напряжение на обмотку электромагнитного реле 16. При этом нормально разомкнутые контакты электромагнитного реле 17, 18 замыкаются, а нормально замкнутое 19, 20 - размыкаются. В результате чего оказывается шунтированным электрический контакт пневмоэлектропреобразователя 21, муфта сцепления 50 передает вращение от двигателя к валикам, начинается намотка и отсчет счетчиком 14 числа оборотов валиков. На этом первый такт завершается, исключая намотку, которая продолжается и во втором такте.
Во втором такте сигнал с датчика 5 переводит шток пневмоцилиндра 41 в исходное положение, шток пневмоцилиндра 47 - в рабочее положение, осуществляя (начиная со второго цикла) обрезку полотна и запись в элементе памяти 22. В результате перемещения штока пневмоцилиндра 41 в исходное положение датчик 1 выдает сигнал на элемент И 30, сигнал с датчика 5 исчезает. В результате перемещения штока пневмоцилиндра 47 исчезает сигнал с датчика 2. Счетчик 14, отсчитав заданное число оборотов, размыкает свой нормально замкнутый контакт. При этом снимается напряжение с обмотки электромагнитного реле 16, размыкаются контакты 17, 18 и замыкаются контакты 19, 20. В результате переключения контактов 17, 18, 19, 20 счетчик прекращает отсчет, расшунтируется электрический контакт пневмоэлектропреобразователя 21, муфта сцепления 50 разрывает передачу вращения с электродвигателя на валики, электропневмопреобразователь 23 выдает сигнал на вход "Считывание" элемента памяти 22. Элемент памяти 22 выдает сигнал на элемент И 30. Элемент И 30 выдает сигнал на вход рабочего положения распределителя 36 и через элемент ИЛИ 25 на вход рабочего положения распределителя 35. На этом второй такт завершается. В третьем такте в результате переключения распределителей 35, 36 и перемещения штоков пневмоцилиндров 42, 43, 44, 45 в рабочее положение происходит отвод заправочного валика, прижимного валика на позиции намотки; центров и прижимного валика на позиции домотки, кроме того, датчики 9, 10, 11, 12 выдают сигналы на элемент И 28, а сигнал с датчика 3 исчезает. Сигнал с элемента И 28 поступает на вход рабочего положения распределителя 39 и через элемент И 31 (на который в это время поступает сигнал и с датчика 4) на вход рабочего положения распределителя 37. На этом третий такт завершается. В четвертом такте в результате переключения распределителей 37, 39 и перемещения штоков пневмоцилиндров 46, 48 происходит расфиксация карусели и включение пневмомуфты, которая осуществляет торможение карусели при ее повороте, кроме того, датчик 7 выдает сигнал, который поступает на вход "Сброс" элемента памяти 22 и на вход элемента И 29, на другой вход которого поступает сигнал с датчика 6, что является также результатом перемещения штока пневмоцилиндра 48. Элемент И 29 выдает сигнал на вход рабочего положения распределителя 38. На этом четвертый такт завершается. В пятом такте в результате переключения распределителя 38 и выдвижения штока пневмоцилиндра 47 пропадает сигнал с датчика 4, с элементов И 24 и с входа распределителя 37, распределитель 37 переключается, шток пневмоцилиндра 46 возвращается в исходное положение, поворачивается карусель, изделия меняют позиции и появляется сигнал на выходе датчика 8. Сигнал с датчика 8 поступает на входы исходных положений распределителей 36, 39, через элемент ИЛИ 26 - на вход исходного положения распределителя 35, и через элемент ИЛИ 27 - на вход исходного положения распределителя 40. На этом пятый такт завершается.
В шестом такте, в результате переключения распределителей 35, 36, 39, 40, возвращаются в исходное положение штоки пневмоцилиндров 42, 43, 44, 45, 48, 49, при этом пропадают сигналы с датчиков 6, 9, 10, 11, 12 и появляются сигналы с датчиков 2, 3. На этом первый цикл работ системы завершается. Возвращение штока пневмоцилиндра 47 в исходное положение происходит в первом такте второго и последующих циклов.
Использование предлагаемого изобретения позволяет упростить систему управления, повысить ее надежность, за счет снижения числа тактов в цикле с 7 до 6, повысить ее производительность.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для дозирования жидких химикатов | 1980 |
|
SU954960A2 |
| ПОЛУАВТОМАТ ДЛЯ ПОДГОТОВКИ МЕСТА КЛЕЙМЕНИЯ НА | 1973 |
|
SU384515A1 |
| Устройство для автоматического управления процессом приготовления и раздачи смеси | 1976 |
|
SU788080A2 |
| СТАНОК ДЛЯ НАКАТКИ ПОЛОТНА В РУЛОН | 1972 |
|
SU348469A1 |
| УСТРОЙСТВО ДЛЯ ИЗГОТОВЛЕНИЯ ДЕТАЛЕЙ ИЗ ПРУТКОВОГО МАТЕРИАЛА | 1991 |
|
RU2009792C1 |
| Система дистанционного управления двигателем | 1974 |
|
SU631670A1 |
| Пневматическое устройство сигнализации состояния двухпозиционного исполнительного механизма | 1981 |
|
SU972540A1 |
| Система связи электронно-вычислительной машины с пневматическими регуляторами | 1985 |
|
SU1341617A1 |
| Способ контроля герметичности изделия и устройство для осуществления способа | 2016 |
|
RU2623188C1 |
| Устройство для получения фасонной нити | 1986 |
|
SU1481287A1 |
Система относится к пневматическим системам автоматического управления. В систему входят исполнительные механизмы в виде пневмоцилиндров, связанные с ними распределители, датчики исходных положений штоков пневмоцилиндров, четыре элемента И, четыре элемента ИЛИ, два пусковых элемента ручного управления, муфта сцепления, электропневмопреобразователь, пневмоэлектропреобразователь, электромагнитное реле с двумя нормально замкнутыми и двумя нормально разомкнутыми контактами, счетчик импульсов, соединенный с фотоприемником и через один из нормально разомкнутых контактов с фотоизлучателем. Фотоприемник и фотоизлучатель имеют оптическую связь. В систему дополнительно введен элемент памяти. Система отличается повышенной производительностью. 2 ил.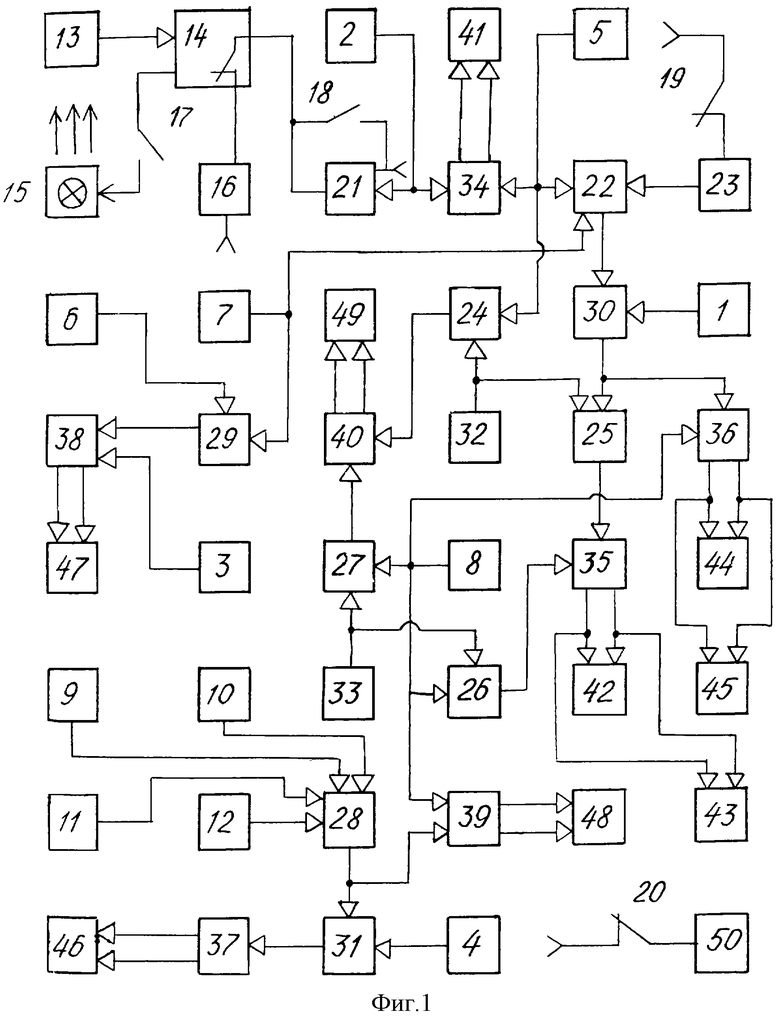
Система автоматического управления станкомнамотки, содержащая исполнительные механизмы в виде пневмоцилиндров, связанные с ними распределители, датчики исходных положений штоков пневмоцилиндров, датчики рабочих положений штоков пневмоцилиндров, четыре элемента И, четыре элемента ИЛИ, два пусковых элемента ручного управления, муфту сцепления, электропневмопреобразователь, пневмоэлектропреобразователь, электромагнитное реле с двумя нормально замкнутыми и двумя нормально разомкнутыми контактами счетчик импульсов, связанный с фотоприемником и через один из нормально разомкнутых контактов с фотоизлучателем, фотоприемник и фотоизлучатель с оптической связью, параллельно электрическому контакту пневмоэлектропреобразователя подключен второй нормально разомкнутый контакт электромагнитного реле, выход пневмоэлектропреобразователя соединен через нормально замкнутый выходной контакт счетчика импульсов с обмоткой электромагнитного реле, первый нормально замкнутый контакт электромагнитного реле соединен со входом электропневмопреобразователя, входы первого элемента И соединены с датчиками рабочих положений штоков пневмоцилиндров заправочного валика прижимного валика позиций намотки, прижимного валика позиции домотки и перемещения центров, второй нормально замкнутый контакт электромагнитного реле соединен с муфтой сцепления, отличающаяся тем, что, с целью повышения надежности и производительности, в нее дополнительно введен элемент памяти, причем датчик исходного положения штока пневмоцилиндра перемещения ножа соединен со входом рабочего положения распределителя пневмоцилиндра съема изделий и входом пневмоэлектропреобразователя, датчик рабочего положения штока пневмоцилиндра съема изделий соединен с входом исходного положения распределителя пневмоцилиндра съема изделий, с входом "Запись" элемента памяти и через первый элемент ИЛИ с входом рабочего положения распределителя пневмоцилиндра перемещения ножа, входы второго элемента И связаны с датчиком рабочего положения штока пневмоцилиндра управления пневмомуфтой и с датчиком рабочего положения штока пневмоцилиндра фиксации карусели, а его выход - с входом рабочего положения распределителя пневмоцилиндра поворота карусели, вход исходного положения которого соединен с датчиком исходного положения штока пневмоцилиндра заправочного валика датчик рабочего положения штока пневмоцилиндра фиксации карусели соединен также и с входом "Сброс" элемента памяти, выход электропневмопреобразователя соединен с входом "Считывания" элемента памяти, входы третьего элемента И соединены с выходом элемента памяти и датчиком исходного положения штока пневмоцилиндра съема изделий, а его выход - с входом рабочего положения распределителя пневмоцилиндров прижима центров и прижимного валика на позицию домотки и через второй элемент ИЛИ с входом рабочего положения распределителя пневмоцилиндров заправочного валика и прижимного валика на позиции намотки, вход исходного положения которого соединен с выходом третьего элемента ИЛИ, выход первого пускового элемента соединен с одним из входов первого и второго элемента ИЛИ, датчик рабочего положения штока пневмоцилиндра поворота карусели соединен с входом исходного положения распределителя пневмоцилиндров подачи центров и прижимного валика на позиции домотки с одним из входов третьего и четвертого элементов ИЛИ и с входом исходного положения штока пневмоцилиндра управления пневмомуфтой, второй пусковой элемент соединен с одним из входов третьего и четвертого элементов ИЛИ, выход четвертого элемента ИЛИ соединен с входом исходного положения распределителя пневмоцилиндра перемещения ножа, выход первого элемента И соединен с входом рабочего положения распределителя пневмоцилиндра управления пневмомуфтой и одним из входов четвертого элемента И, другой вход которого соединен с датчиком исходного положения штока пневмоцилиндра поворота карусели, а его выход соединен с управляющим входом распределителя пневмоцилиндра фиксации карусели.
| Пневматическое распределительное и управляющее устройство для намоточных машин | 1978 |
|
SU929522A1 |

