Известны устройства приводов проводоводителей статорообмоточных станков с механизмом для продольного хода и механизмом для качательного движения проводоводителя.
Предложенное устройство отличается тем, что содержит планетарную зубчатую передачу с эксцентрично закрепленным на сателлите пальцем и две взаимно перпендикулярные, связанные с эксцентричным пальцем кулисы.
Это обеспечивает увеличение производительности, упрощение конструкции и уменьшение габаритов статорообмоточного станка.
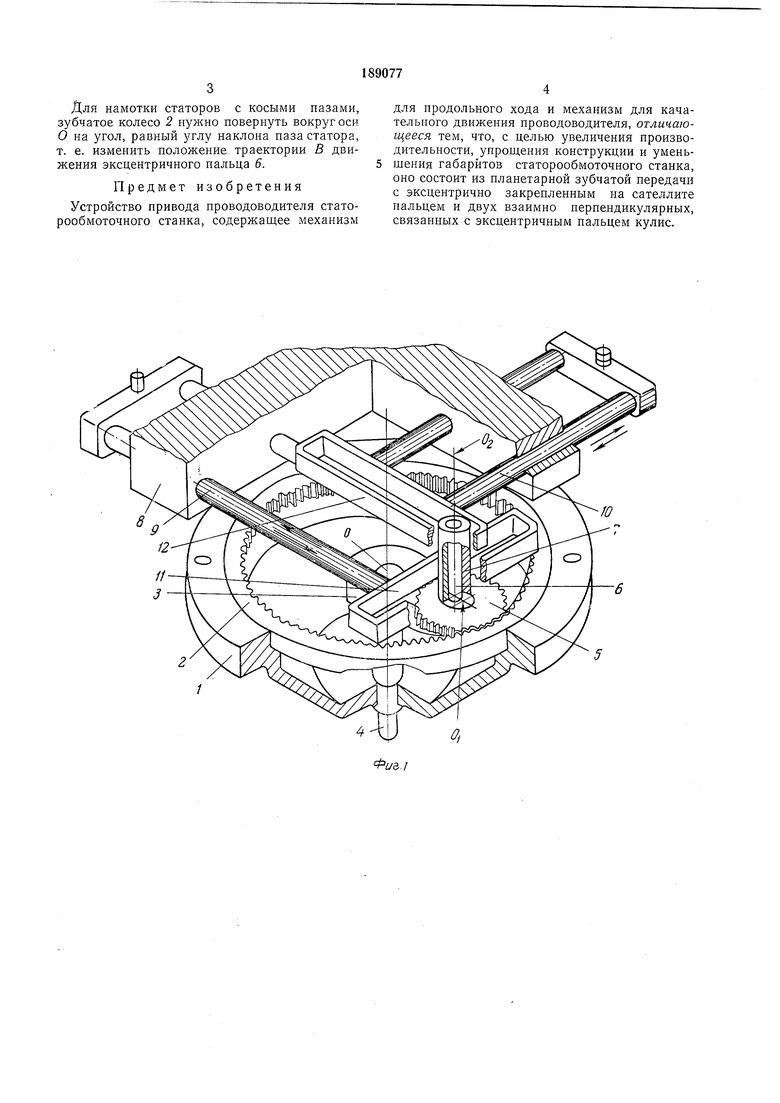
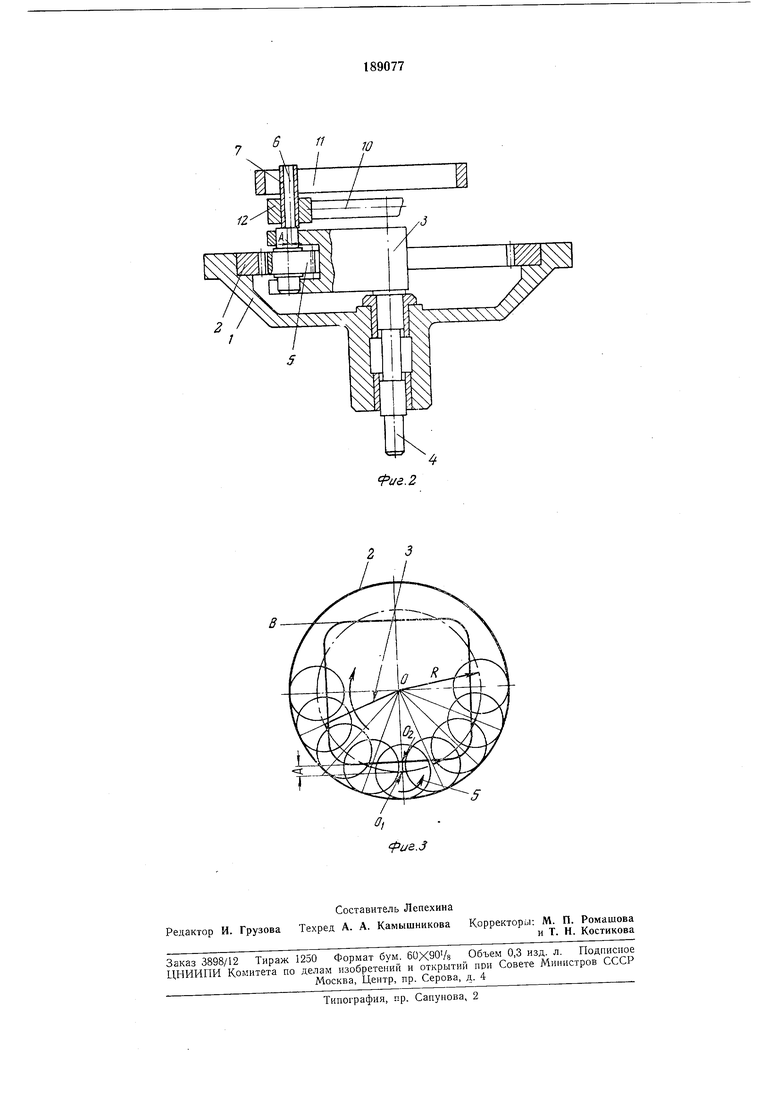
На фиг. 1 и 2, изображено планетарно-кривошипное устройство привода проводоводителя статорообмоточного станка, работающего по способу непосредственной намотки в паз; на фиг. 3 - траектория движения В, которую описывает эксцентричный палец.
В корпусе / неподвижно крепится колесо 2 с внутренними зубьями. Водило 3, жестко связанное с валом 4, вращаясь вокруг оси О, расноложенной соосно с колесом 2, несет щестерню 5 с закрепленными в ней эксцентричным нальцем 6 и роликом 7. Шестерня 5, во время вращения водила 3, катится без скольжения по внутренней стороне ненодвижного зубчатого колеса 2, вращаясь вокруг оси Oi. Ось 0-2 эксцентричного пальца 6 при этом описывает траекторию В (см. фиг. 3), представляющую собой квадрат с закругленными
верщинами. В корпусе 8, соединенном жестко с корпусом 1, номещены перпендикулярно друг другу ползуны 9 и 10. Ползуны жестко связаны с кулисами 11 и 12.
Эксцентричный палец 6 с роликом 7 одновременно находится в назах обеих кулис, а так как пазы кулис перпендикулярны друг другу, то налец 6, двигаясь но траектории В, сообщает кулисам возвратно-поступательное движение.
Движение от ползунов 9 и 10 сообщается проводоводителю статорообмоточного станка, чем достигается замкнутый цикл продольноноперечных движений проводоводителя при обмотке статоров.
Такой закон двнжения обеспечивается устройством при следующих условиях:
1.Величина передаточного отнощения зубчатой пары 2-5 равна .
2.Величина эксцентриситета пальца 6 равна
1 - cos а
Г 1 - cos а 1
A R ((г -l)aj
мм,
1- COS (i
где R - радиус водила 5;
радиус водила
а - половина угла новорота водила 3, в пределах которого ось Оа эксцентричного пальца 6 описывает прямолинейный участок траектории
Для намотки статоров с косыми пазами, зубчатое колесо 2 нужно повернуть вокруг оси О на угол, равный углу наклона паза статора, т. е. изменить положение траектории В движения эксцентричного пальца 6.
Предмет изобретения
Устройство привода проводоводителя статорообмоточного станка, содержащее механизм
для продольного хода и механизм для качательного движения проводоводителя, отличающееся тем, что, с целью увеличения производительности, упрощения конструкции и уменьшения габаритов статорообмоточного станка, оно состоит из планетарной зубчатой передачи с эксцентрично закрепленным на сателлите пальцем и двух взаимно перпендикулярных, связанных с эксцентричным пальцем кулис.
| название | год | авторы | номер документа |
|---|---|---|---|
| Станок для намотки статоров электрических машин | 1977 |
|
SU989688A1 |
| МЕХАНИЗМ ПРОВОДОВОДИТЕЛЯ К СТАТОРООБМОТОЧНОМУ | 1973 |
|
SU373820A1 |
| УСТРОЙСТВО для ПЕРЕКЛЮЧЕНИЯ ШАГА ОБМОТКИ СТАТОРООБМОТОЧНОГО СТАНКА | 1970 |
|
SU278835A1 |
| Устройство для захвата и подачи плоских изделий | 1986 |
|
SU1375548A1 |
| Станок для намотки статоров электрических машин | 1976 |
|
SU652657A1 |
| Станок для намотки статоров | 1983 |
|
SU1156200A1 |
| Устройство для перемешивания | 2022 |
|
RU2788075C1 |
| Станок для намотки статора электрической машины | 1978 |
|
SU765941A1 |
| Станок для намотки статоров электрических машин | 1990 |
|
SU1757030A1 |
| Станок для намотки статоров электрических машин | 1979 |
|
SU790077A2 |
2 3
