Устройства для автоматической стереометрической манипуляции микроэлектродов в эксперименте, содержащие установку для закрепления исследуемого животного и микроэлектрод с фиксирующим механизмом, известны.
Предлагаемое устройство отличается от известных тем, что в нем установлен ортогональный манипулятор, выполненный в виде трех последовательно соединенных исполнительных элементов, например, исполнительных гидравлических цилиндров. При этом каждый послел1ующий цилиндр жестко закреплен на штоке поршня предыдущего, а электрод жестко закреплен на штоке поршня последнего, третьего, цилиндра. Благодаря этому микроэлектрод автоматически неремещается по поверхности мозга исследуемого животного и в глубине его.
Устройство снабжено также программирующей электромеханической системой, выполненной, например, в виде ведущих гидравлических цилиндров различного диаметра, штоки поршней которых опираются на кулачки переменного радиуса. Кулачки жестко связаны с системой дискретного заценления, перемещающейся группами выдвижных штырей, расположенных в определенной последовательности на барабане. Это обеспечивает длительное программированное перемещение микроэлектрода по поверхности и в глубине мозга исследуемого животного.
Для индикации положения микроэлектрода в исследуемом сечении в предлагаемом устройстве установлено световое индикаторное табло.
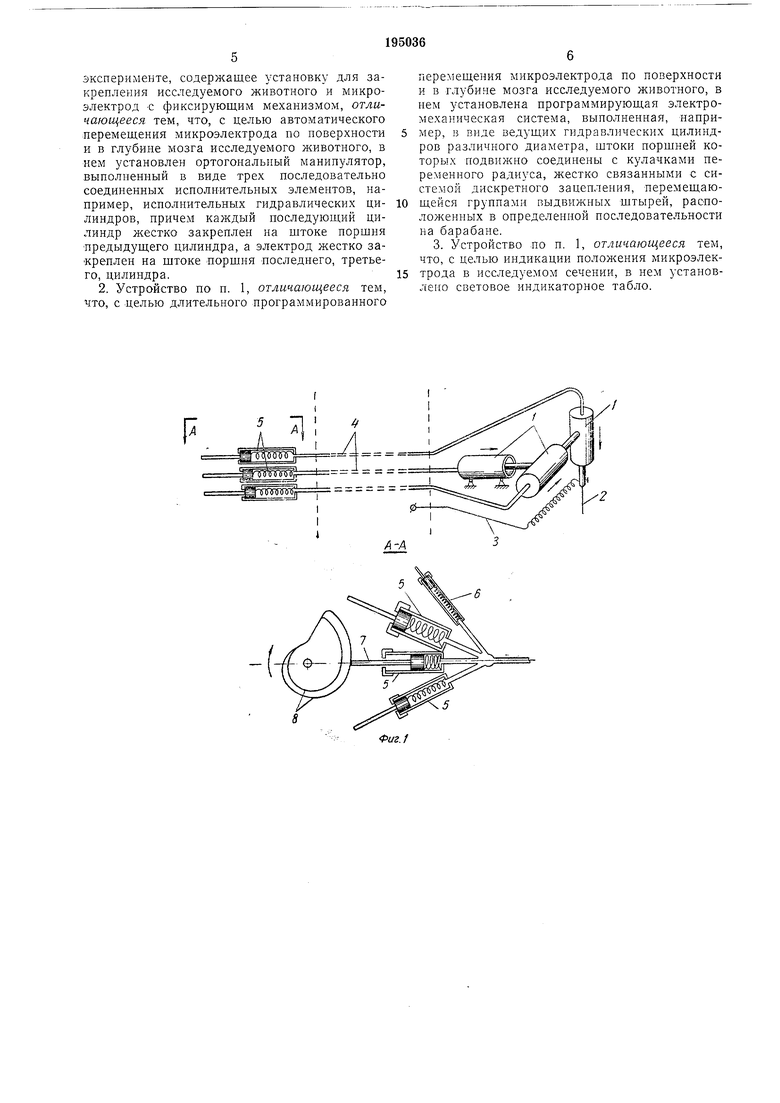
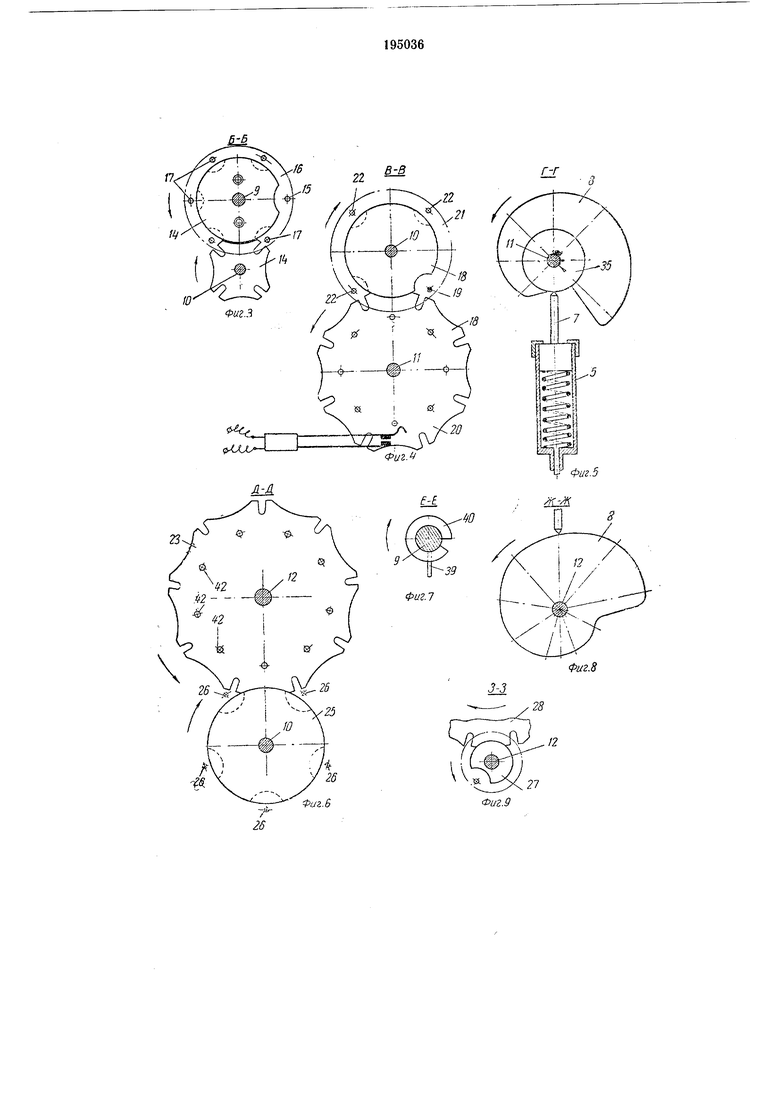
На фиг. I изображен ортогональный манипулятор предлагаемого устройства; на фиг. 2- его программирующая электромеханическая
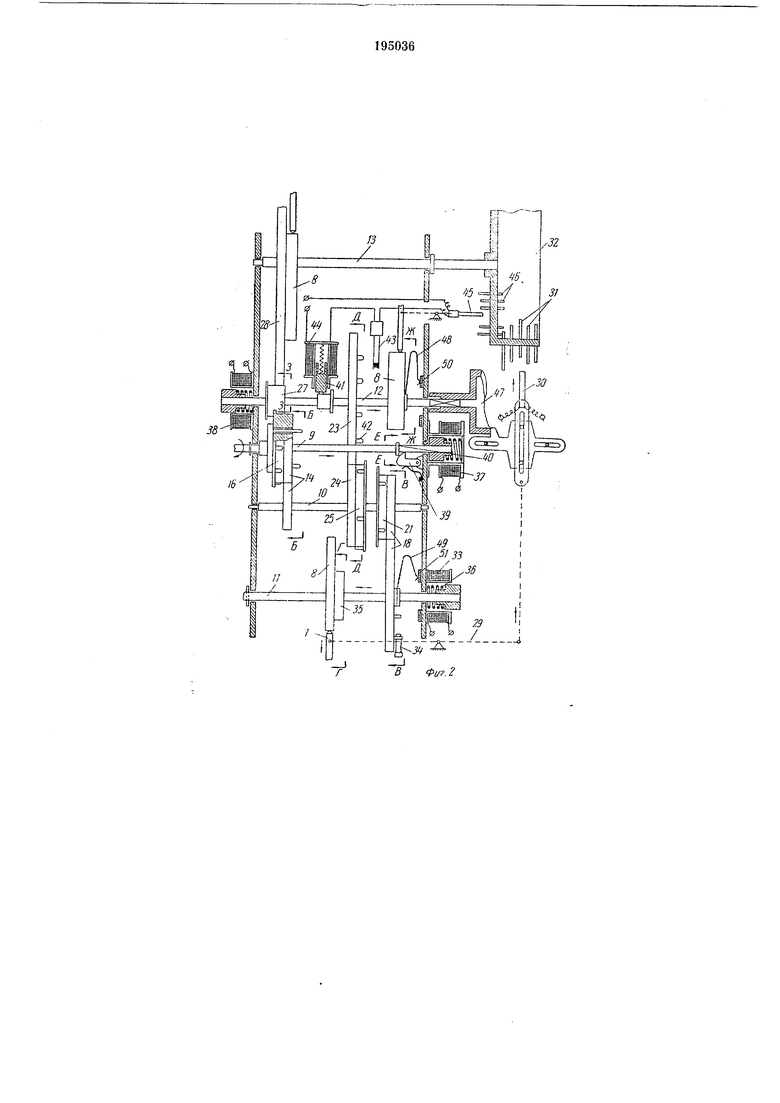
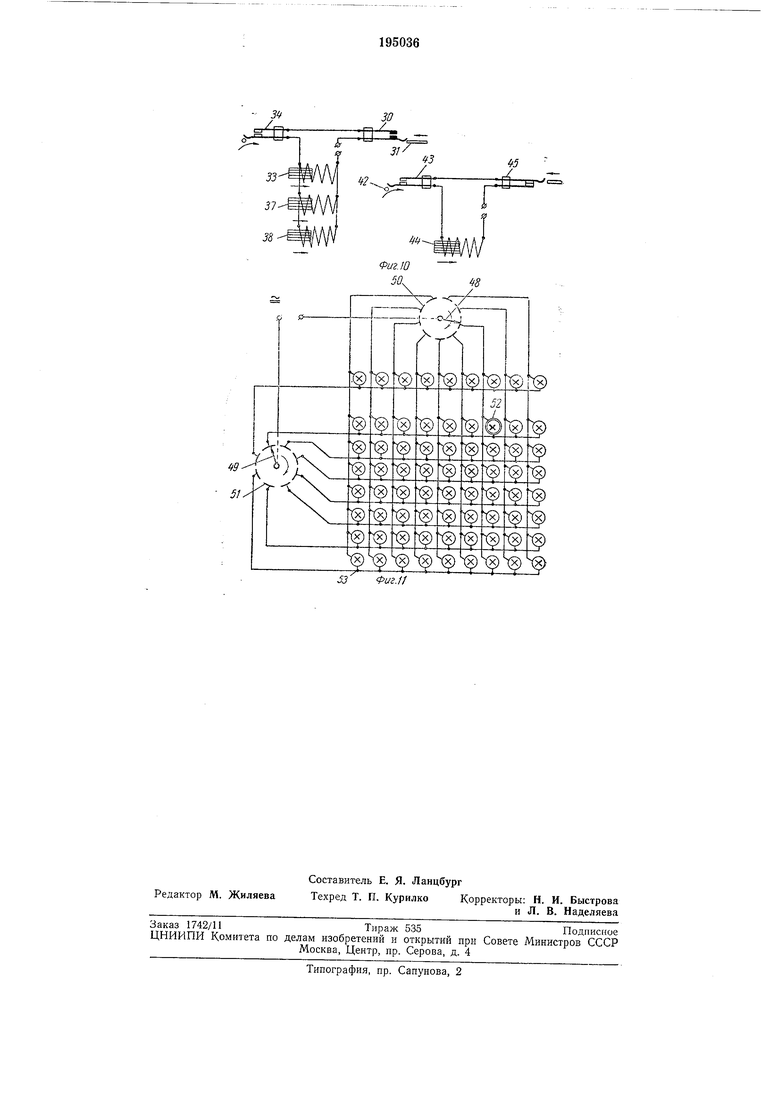
система, вид сверху, в разрезе; на фиг. 3-9- то же, сечения по Б-Б, В-В, Г-Г, Д-Д, Е-Е, Ж-Ж и 3-3 на фиг. 2; на фиг. 10- электрические схемы нрограммирующей системы; на фиг. 11-электрическая схема индикаторного табло.
Устройство ортогональный манилулятор, выполненный в виде трех последовательно соединенных исполнительных элементов, в качестве которых могут быть гидравлические цилиндры /. При этом каждый последуюш,ий цилиндр жестко закреплен на штоке .предыдущего. На штоке последнего, третьего, п линдра жестко закреплен микроэлектрод 2, соединенный проводником 5 с регистрирую.
щим или раздражающим прибором. Манипулятор размещают над установкой для закрепления черепа исследуемого животного.
исследуемого объекта (например, вне экранирующей камеры), чем обеспечивается защита от помех.
К каждому из трех шлангов 4 в ведущей системе присоединено несколько ведущих цилиндров 5 различного диаметра, в том числе цилиндр 6 «децимасштаба с площадью порщця, составляющей Vio площади порщней ведомых цилиндров /.
Подпружиненный щток 7 какого-либо одного из цилиндров 5 или 6 находится в контакте с кулачком 8 переменного радиуса. При этом каждому из цилиндров / соответствует свой кулачок. При вращении кулачка шток 7 перемещает поршень, и жидкость поступает в соответствующий исполнительный цилиндр / или вытесняется из него. В результате микроэлектрод 2 определенным образом перемещается в пространстве: погружается в мозг экспериментального животного или извлекается оттуда, двигаясь по поверхности мозга и в глубине его. Смена масштаба перемещения производится одновременным пакетным переключением цилиндров 5 и 6 на всех трех щлангах. Комбинациями смен этих цилиндров и кулачков обеспечивается необходимый набор масштабов.
В предлагаемом устройстве перемещение микроэлектрода по поверхности « в глубине мозга осуществляется по программе, что обеспечивается специальной программирующей электромеханической системой . Программирующая система содержит пять валов 9, 10, 11, 12 и 13, соединенных собой шестернями дискретного зацепления (мальтийскими Крестами).
Валы 9 и 10 соединены парой щестерен 14 с одним штырем 15 (фиг. 3). При смещении вала 9 по стрелке (фиг. 2) в зацепление вводится шестерня 16 с щестью штырями 17 (ускоренный ход). Валы 10 И // соединены парой шестерен 18 с одним штырем 19 (фиг. 4). При смещении вала // по стрелке (фиг. 2) шестерня 20 зацепляется с шестерней 21, имеющей четыре штыря 19 и 22 (фиг. 4).
Валы 10 и 12 соединены шестерней 23 и диском 24 холостого хода без штырей.
При смещении вала 12 по стрелке (фиг. 2) шестерня 23 приходит в зацепление с шестерней 25 с пятью штырями 26 (фиг. 6). Валы 12 и 13 имеют постоянное зацепление с шестернями 27 и 28 (фиг. 2 и 9).
Вся система приводится в движение постоянно работающим электродвигателем с редуктором (на чертежах не показаны), выходной вал которого соединен с валом 9. Вращение вала 9 передается системой зацепления на вал 11, что приводит к повороту кулачка 8. Шток 7 поршня ведущего цилиндра 5, например, вертикального хода электрода при этом отжимается (фиг. 2,5) и электрод совершает вертикальное перемещение.
го барабана 32. Величиной выступающей части штыря 31 программного барабана задается предельное погружение микроэлектрода. Контакт 30, замыкаемый 31, подго5 тавлнвает цепь соленоида 33, которая окончательно замыкается контактом 34 при начале врашения шестерни 23 до зацепления и поворота ее с парой шестерен 18.
Кратковременное срабатывание соленоида
10 33 смещает вал 11 по стрелке (ф«г. 2), и щток 7 соскакивает с торца кулачка 8 на диск 35 с радиусом, соответствующим нулевой позиции штока (фиг. 5). От обратного смещения под воздействием
15 пружины 36 внутри соленоида 33 вал удерл ивается штоком 7 за боковую поверхность кулачка. Одновременно с соленоидом 33 срабатывают соленоиды 37 « 38, которыми смещаются валы 9 и 12 по стрелкам (фиг. 2). От
20 обратного смещения вал 9 здерживается захватом защелки 39 за бортик 40 на валу, а вал 12 удерживается защелкой 41.
Подключением шестерни 16 ускоренного хода ликвидируются ненужные выдержки .в точках поворота микроэлектрода, а при срабатывании соленоида 33 обеспечивается быстрый перевод кулачка в нулевую позицию. При этом освобождается зацепление вала //, и он возвращается в рабочее положение. Вал .9
30 возвращается в рабочее положение .при совмещении прорези бортика 40 вала 9 с защелкой 41.
Одновременно кулачок 8 переводится в следующую позицию. Штырьки 42 на щестерне
35 23 пр-и каждом проходе мимо контакта 43 замыкают цепь соленоида 44 (нормальное положение контакта 45 - замкнутое), который оттягивает защелку 41, и вал 12 возвращается в исходное полол ение. Таким образом, шестерня 23 и кулачок, сидящий на валу 12, поворачиваются на одну по зицию, электрод переходит на следующую вертикаль.
Программа поперечного движен-ия микроэлектрода задается боковыми штырями 46
45 программного барабана 32, которые размыкают контакт 45; в этом случае вал 12 продолжает вращаться, и микроэлектрод лроносится в начальную позицию над вертикалями. Винтовая поверхность детали 47 переводит
50 контакт 30 -к новому программному щтырю.
При полном обороте вала 12 переводятся в следующую позицию шестерня 28 и кулачок 5, сидящий на валу 13. Микроэлектрод переходит на следующее сечение.
55 На валах 11 и 12 укреплены контакты 48 и 49, которые скользят соответственно по коллекторам 50, 51. При этом на пересечении подключенных проводников зажигается лампочка 52, отмечающая положение микроэлектрода
60 на Индикаторном табло 53.
эксперименте, содержащее установку для закрепления исследуемого животного и микроэлектрод -с фиксирующим механизмом, отличающееся тем, что, с целью автоматического перемещения микроэлектрода по поверхности и в глубине мозга исследуемого животного, в нем установлен ортогональный манипулятор, выполненный в виде трех последовательно соединенных исполнительных элементов, например, исполнительных гидравлических цилиндров, причем каждый последующий цилиндр жестко закреплен на штоке поршня предыдущего цилиндра, а электрод жестко закреплен на штоке лоршня последнего, третьего, цилиндра.
2. Устройство по п. 1, отличающееся тем, что, с целью длительного программированного
перемещения микроэлектрода по поверхности и в глубине мозга исследуемого животного, в нем установлена программирующая электромеханическая система, выполненная, например, в виде ведущих гидравлических цилиндров различного диаметра, штоки норщней которых подвижно соединены с кулачками переменного радиуса, жестко связанными с системой дискретного зацепления, перемещающейся группами выдвижных штырей, расположенных в определенной последовательности на барабане.
3. Устройство по п. 1, отличающееся тем, что, с целью индикации положения микроэлектрода в исследуемом сечении, в нем установлено световое индикаторное табло.
| название | год | авторы | номер документа |
|---|---|---|---|
| Микроманипулятор для биологических исследований головного мозга животного | 1976 |
|
SU582089A1 |
| Автоматическая линия для изготовления стержней | 1990 |
|
SU1759533A1 |
| ПНЕВМАТИЧЕСКИЙ ПРИВОД САЯПИНА И ЭЛЕКТРОПНЕВМАТИЧЕСКОЕ УПРАВЛЯЮЩЕЕ УСТРОЙСТВО | 1998 |
|
RU2131065C1 |
| Устройство для вытирания недомолоченных остатков в зерноуборочном комбайне | 1983 |
|
SU1436924A1 |
| Захватная головка манипулятора | 1986 |
|
SU1342727A1 |
| УСТРОЙСТВО ОБРАЗУЮЩЕЕ И РАССЕИВАЮЩЕЕ АЭРОЗОЛЬ | 2006 |
|
RU2318609C1 |
| УСТРОЙСТВО ДЛЯ ИССЛЕДОВАНИЯ СКОЛЬЗЯЩЕГОКОНТАКТА Л1 | 1966 |
|
SU177447A1 |
| МАТРИЦЕНЕСУЩЕЕ УСТРОЙСТВО БУКВООТ НАБОРНЫХ МАШИН | 1966 |
|
SU182740A1 |
| Исполнительный механизмМЕХАНичЕСКОгО ТОРМОзА | 1978 |
|
SU799678A3 |
| ПАТЕНТНО-ТЕХ}{Г€~НАЯБЧБЛИО~еКАИ. П. Терешин | 1971 |
|
SU292689A1 |
32
31
®
Xx)f(x)
;® ;®
))
Фиг.I
