Известна ходовая платформа, например, шагающего экскаватора, включающая опорный колокол, опорный диск с центральной стойкой, вертикальные и горизонтальные цилиндры.
В предлагаемой ходовой платформе к опорному колоколу ее жестко присоединены штоки горизонтальных цилиндров, на гильзах которых смонтированы ролики. Последние перемещаются ;по крестовине, установленной на центральной стойке.
Это позволяет упростить конструкцию илатформы и повысить надежность работы экскаватора.
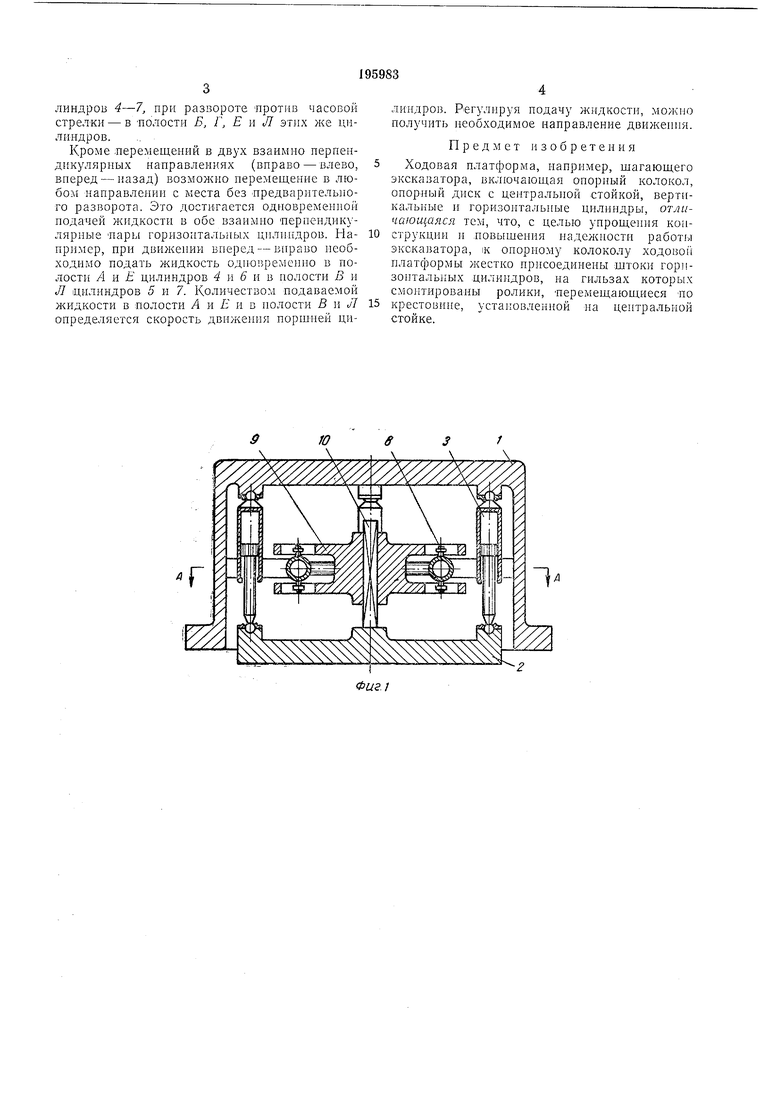
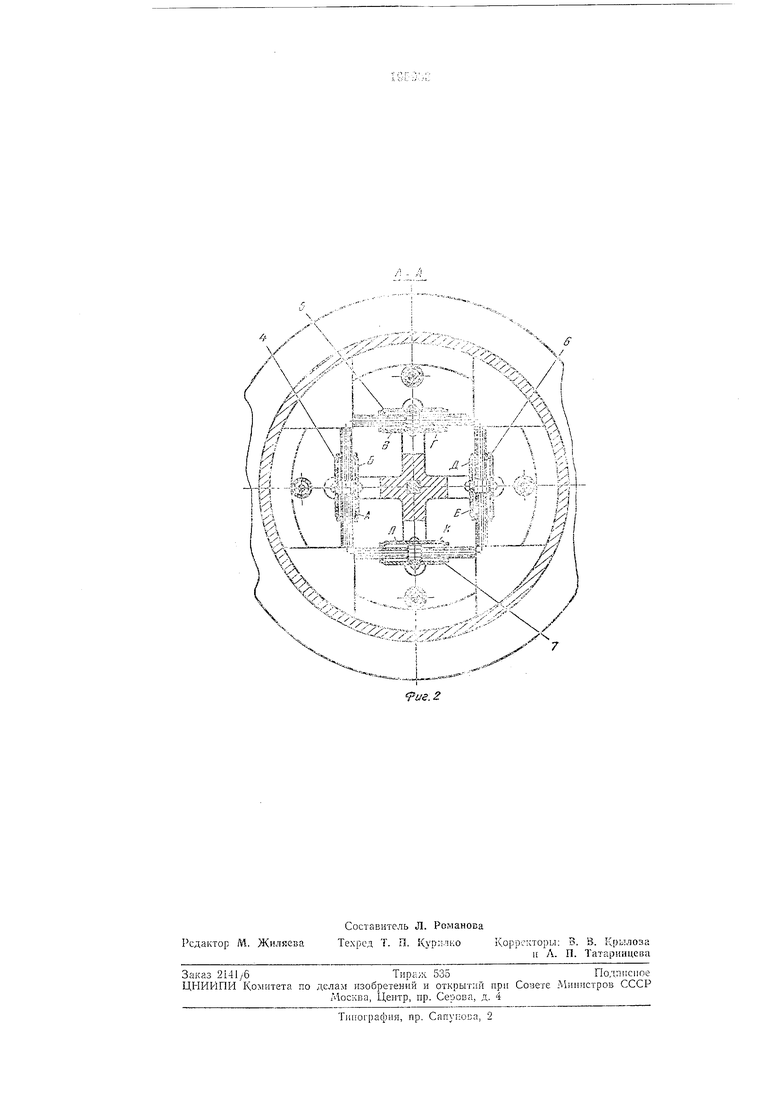
Па фиг. 1 изображеиа описываемая ходовая платформа в положении, когда опорный колокол поднят; на фиг. 2 - то же, разрез по Л-Л на фиг. 1.
Ходовая платформа включает опорный колокол /, опорный диск 2, вертикальные цилиндры 3j четыре горизонтальных цилиндра 4, 5, 6, 7 с роликамии 8, крестовину 9 и центральную стойку 10.
Опорный колокол / соединен с опорным диском 2 вертикальными гидроцилиндрамн сЗ, количество которых может быть любое, но не менее трех.
линдра неподвижно связаны щтоками с опорным колоколом. В плане четыре гидроцилиндра образуют квадрат. Гильзы цилиндров через ролики 8 соединены с крестовиной 9. Крестовина своими рычагами опирается на горизонтальные цилиндры и соединяется с центральной стойкой 10, имеющей шлицевое или квадратное сечение. Рычаги крестовины имеют продольные пазы, по которым перемещаются ролики 8 горизонтальных цилиндров. Центральная стойка установлена перпендикулярно опорному диску и скреплена с ним.
Движение ходовой платформы происходнт путем поочередного подъема и опускания опорного колокола и опорного диска с помощью вертикальных цилиндров и горизонтального перемещення их относительно друг друга с помощью горизонтальных цилиндров.
Для случая, изображенного па фиг. 1, когда ходовая платформа опирается на опорный диск, горизонтальное перемещение осуществляется следующим образом.
При движении вперед жндкость подается в полости А и Е цилиндров 4 и 6, при движении назад - в полости Б и Д этих цилиндров; при движеини вправо - в полости В и Л цилиндров 5 и 7, при движении влево - в их полости Г и К. При развороте по часовой стрелке жидкость подается в полости А, В, Д и /( цнлиндров 4-7, при развороте против часовой стрелки - в ПОЛОСТИ Б, Г, Е и Л этих же цнлиндров.
Кроме леремещеиий в взаимио перпендикулярных направлениях (вправо - влево, внеред - назад) возможно перемещение в любом направлеиин с места без предварительного разворота. Это достигается одновремепной подачей жидкости в обе взаимио перпендикулярные нары горизонтальных цилиндров. Нанример, при движении вперед - вправо иеобходимо подать жидкость одиовременно в нолости А и Е цилиндров 4 и 6 и в нолости В и Л цилиндров 5 и 7. Количеством подаваемой жидкости в полости А и Е и в иолости В и с/7 оиределяется скорость движения норшией цилиидров. Регулируя подачу жидкости, можно получить необходимое направление движепня.
Предмет изобретения
Ходовая платформа, иапрнмер, шагающего экскаватора, включающая Опорный колокол, опорный диск с центральной стойкой, вертикальные и горизоитальиые цилиндры, от ичающаяся тем, что, с целью упрощепня конструкцнн н ловышення надежности работы экскаватора, IK опорному колоколу ходовоГ платформы жестко присоединены щтоки горизонтальных цилиндров, на гильзах которых смонтированы ролики, перемещающиеся по крестовине, устаиовленной ца центральной стойке.
| название | год | авторы | номер документа |
|---|---|---|---|
| Ходовая платформа, например, шагающего экскаватора | 1976 |
|
SU622944A2 |
| Шагающий движитель | 1978 |
|
SU823212A1 |
| ШАГАЮЩИЙ ХОДОВОЙ МЕХАНИЗМ ДЛЯ ТЯЖЕЛЫХ МАШИН | 1966 |
|
SU222981A1 |
| Гидропривод шагающего ходового оборудования экскаватора | 1987 |
|
SU1460142A1 |
| Колесно-шагающий движитель транспортного средства | 1982 |
|
SU1110708A1 |
| ШАГАЮЩЕЕ УСТРОЙСТВО | 1969 |
|
SU247863A1 |
| Устройство для предотвращения налипания и намерзания горной массы к днищу опорной базы и лыжам шагающего экскаватора | 2024 |
|
RU2828513C1 |
| Шагающее ходовое оборудование | 1980 |
|
SU962480A2 |
| ШАГАЮЩЕЕ ХОДОВОЕ ОБОРУДОВАНИЕ | 1993 |
|
RU2034963C1 |
| Самоходная буровая установка | 1980 |
|
SU899908A1 |
, /X
- -
.:.
