Известен шагающий ходовой механизм для тяжелых машин, например экскаваторов, содержащий нижнюю раму, опорные плиты, горизонтальные и вертикальные гидроцилиндры.
В предложенном механизме опорные плиты соединены между собой, штоками горизонтальных гидроцилиндров, на корпусах которых смонтированы ролики, перемещающиеся вдоль пазов кронштейнов, шарнирно укрепленных на нижней раме.
Это повышает эффективность и обеспечивает синхронизацию перемещения опорных плит.
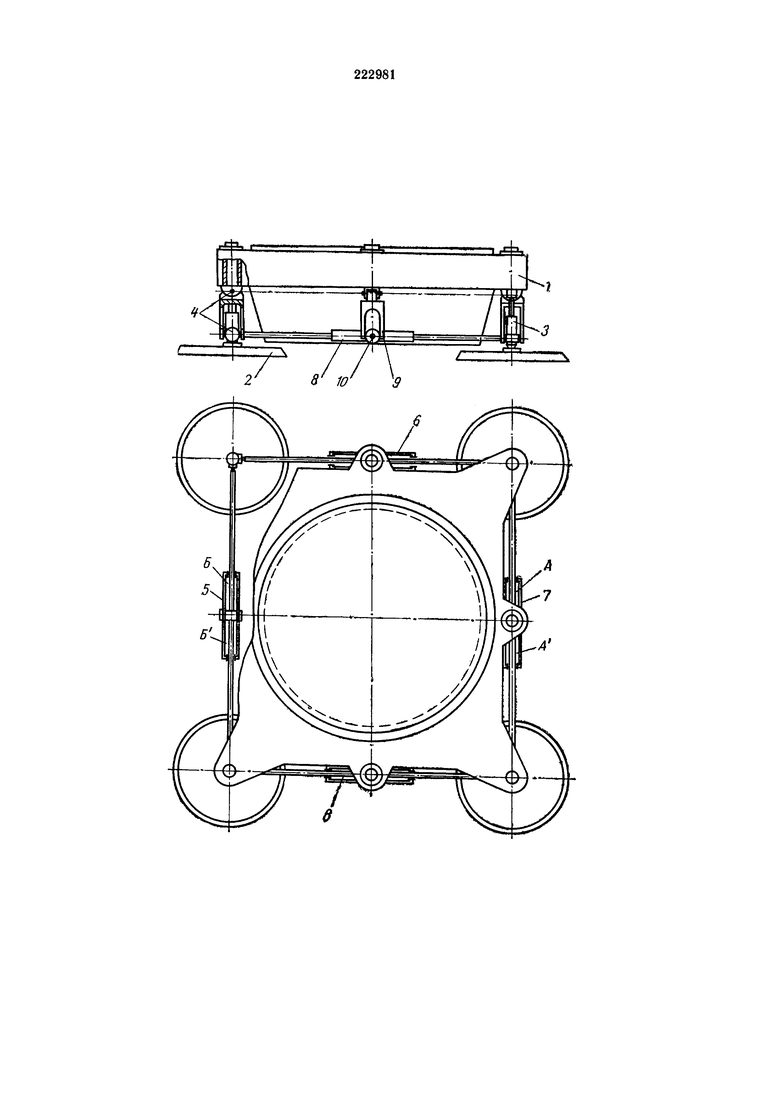
На чертеже показан описываемый механизм в двух проекциях.
Шагающий ходовой механизм содержит нижнюю раму 1, имеющую опорную плоскость, опорные плиты 2, соединенные с нижней рамой вертикальными гидроцилиндрами 3, имеющими шарнирные соединения 4 с нижней рамой и опорными плитами. Гидроцилиндры 3 соединены шаровыми шарнирами со штоками горизонтальных гидроцилиндров 5, 6, 7, 8, причем каждый из последних соединяют два вертикальных гидроцилиндра. Горизонтальные гидроцилиндры связаны с нижней рамой с помощью закрепленных на раме кронштейнов 9. Кроме того, кронштейны поворачиваются относительно своей вертикальной оси и изгибаются в шарнире перпендикулярно к горизонтальным гидроцилиндрам. Относительно кронштейнов 9 горизонтальные гидроцилиндры перемещаются вертикально благодаря наличию в кронштейнах продольных пазов, в которых размещены ролики 10, закрепленные на корпусах горизонтальных гидроцилиндров.
Движение машины происходит при поочередном подъеме и опускании нижней рамы и опорных плит и горизонтальном их перемещении относительно друг друга. Подъем и опускание нижней рамы и опорных плит осуществляют вертикальными гидроцилиндрами 3, а горизонтальное перемещение - горизонтальными гидроцилиндрами 5, 6, 7, 8. При движении машины вперед, когда нижняя рама поднята, жидкость подают в полости и цилиндров 5 и 7.
Рычаги гидроцилиндров 6 и 8 изгибаются при этом в шарнирах, а ролики 10 этих же цилиндров перемещаются по пазам.
Для движения в любом направлении с места без предварительного разворота необходимо подать жидкость в обе взаимно перпендикулярные пары гидроцилиндров. Регулируя подачу жидкости, можно получить необходимое направление движения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Опорно-ходовая часть тяжелых машин | 1983 |
|
SU1129298A1 |
| Гидропривод шагающего ходового оборудования экскаватора | 1987 |
|
SU1460142A1 |
| ШАГАЮЩЕЕ ХОДОВОЕ ОБОРУДОВАНИЕ | 1993 |
|
RU2034963C1 |
| Шагающий ходовой механизм | 1981 |
|
SU1032124A1 |
| Опорное устройство шагающей машины | 1973 |
|
SU620555A1 |
| Шагающее устройство землеройной машины | 1983 |
|
SU1121365A1 |
| Ходовая платформа, например, шагающего экскаватора | 1976 |
|
SU622944A2 |
| ОПОРНОЕ УСТРОЙСТВО ШАГАЮЩЕГО ХОДОВОГО МЕХАНИЗМА | 1969 |
|
SU251484A1 |
| Шагающее ходовое оборудование | 1973 |
|
SU702129A1 |
| Шагающее ходовое оборудование | 1979 |
|
SU899801A1 |
Шагающий ходовой механизм для тяжелых машин, например экскаваторов, содержащей нижнюю раму, опорные плиты, горизонтальные и вертикальные гидроцилиндры, отличающийся тем, что, с целью повышения эффективности и обеспечения синхронизации перемещения опорных плит, последние соединены между собой штоками горизонтальных гидроцилиндров, на корпусах которых смонтированы ролики, имеющие возможность перемещения вдоль пазов кронштейнов, шарнирно укрепленных на нижней раме.
