(54) ХОДОВАЯ ПЛАТФОРМА, НАПРИМЕР, ШАГАЮЩЕГО ЭКСКАВАТОРА
| название | год | авторы | номер документа |
|---|---|---|---|
| ХОДОВАЯ ПЛАТФОРМА, НАПРИМЕР, ШАГАЮЩЕГО ЭКСКАВАТОРА | 1967 |
|
SU195983A1 |
| Ходовой механизм щагающего типа | 1976 |
|
SU659695A1 |
| Колесно-шагающий движитель транспортного средства | 1982 |
|
SU1110708A1 |
| ШАГАЮЩИЙ ХОДОВОЙ МЕХАНИЗМ ДЛЯ ТЯЖЕЛЫХ МАШИН | 1966 |
|
SU222981A1 |
| Ходовая часть транспортного средства | 1977 |
|
SU709453A2 |
| Разгрузочная консоль роторного экскаватора | 1976 |
|
SU1229283A1 |
| ШАГАЮЩЕЕ ХОДОВОЕ ОБОРУДОВАНИЕ | 1993 |
|
RU2034963C1 |
| Гидропривод шагающего ходового оборудования экскаватора | 1987 |
|
SU1460142A1 |
| Управляемая гусеничная тележка многогусеничной машины | 1976 |
|
SU708026A1 |
| Шагающий движитель | 1978 |
|
SU823212A1 |
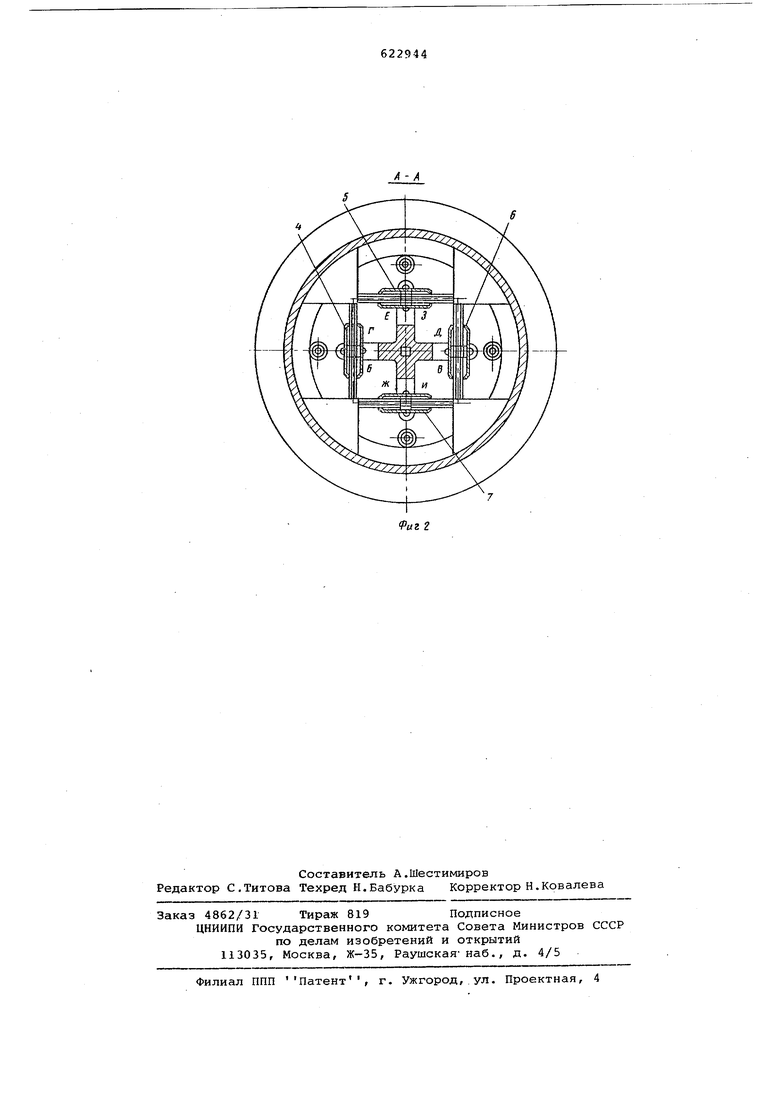
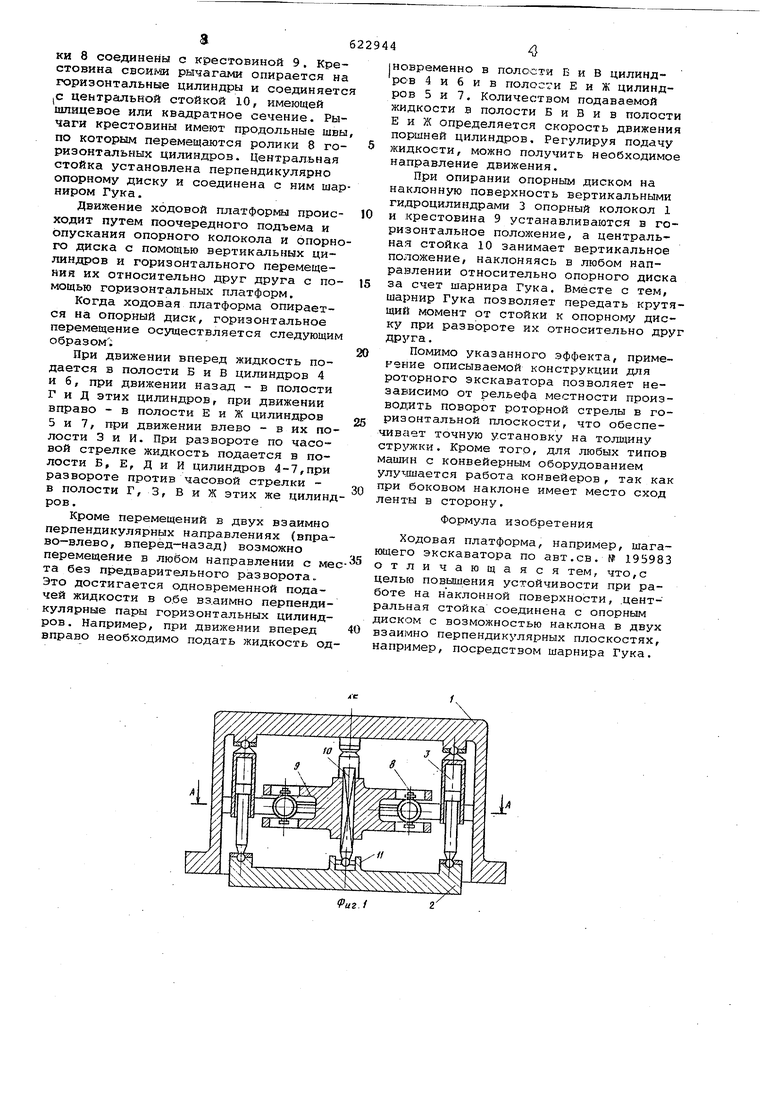
Изобретение относится к горной технике и может быть использовано в тяжелых горных машинах, например в шагающем экскаваторе. По основному авт.св. № 195983 известна ходовая платформа, включающая опорный колокол, опорный диск с цент ральной стойкой, вертикальные и горизонтальные цилиндры. К опорному ко локолу ходовой платформы жестко присоединены штоки горизонтальных цилиндров, на гильзах которых смонтиро ваны ролики, перемещающиеся по крестовине, установленной на центральной стойке. Недостатком известной конструкции является то, что при опирании машины ла наклонную поверхность опорным диском ввиду жесткого соединения с ним центральной стойки вся платформа при подъеме, опускании и работе машины наклонена к горизонту. Это сниЛает устойчивость машины, так как центр .тяжести машины смещается относительно центра опорного ди ка. Кроме того, работа на наклонной поверхности вредно сказывается на процессе работы оборудования, например конвейеров. Целью изобретения является повЕлшение устойчивости при работе на наклонной поверхности. Поставленная цель достигается тем, что центральная стойка соединена с опорным диском с возможностью наклона в двух взаимно перпендикулярных плоскостях, например, посредством шарнира Гука. На фиг.1 изображена описываемая ходовая платформа; на фиг.2 - разрез А-А фи г.1. Ходовая платформа включает опорный колокол 1, опорный диск 2, вертикальные цилиндры 3, четыре горизонтальных цилиндра 4--7 с роликами 8, крестовину 9, центральную стойку 10 и шарнир Гука 11. Опорный колокол 1 соединен с опорным диском 2 вертикальными гидроцилиндрами 3, количество которых может быть любое, но не менее трех. Соединение вертикальных гидроцилиндров с опорным колоколом и опорным диском осуществляется через сферичес.кие штыри или шарниры Гука. Четыре горизонтальных цилиндра неподвижно связаны штоками с опорным колоколом. В плане четыре гидроцилиндра образуют квадрат. Гильзы цилиндров через ролики 8 соединены с крестовиной 9, Крестовина своими рычагаг ш опирается на горизонтальные цилиндры и соединяетс jC центральной стойкой 10, имеющей шлицевое или квадратное сечение. Рычаги крестовины имеют продольные швы по которым перемещаются ролики 8 горизонтальных цилиндров. Центральная стойка установлена перпендикулярно опорному диску и соединена с ним шарниром Гука.
Движение ходовой платформы происходит путем поочередного подъема и опускания опорного колокола и опорного диска с помощью вертикальных цилиндров и горизонтального перемещения их относительно друг друга с помощью горизонтальных платформ.
Когда ходовая платформа опирается на опорный диск, горизонтальное перемещение осуществляется следующим образом;
При движении вперед жидкость подается в полости В и В цилиндров 4 и б, при движении назад - в полости Г и Д этих цилиндров, при движении вправо - в полости Е и Ж цилиндров 5 и 7, при движении влево - в их полости 3 и И. При развороте по часовой стрелке жидкость подается в полости Б, Е, Д и И цилиндров 4-7,при развороте против часовой стрелки в полости Г, 3, В и Ж этих же цилиндров.
Кроме перемещений в двух взаимно перпендикулярных направлениях (вправо-влево, вперед-назад) возможно перемещение в любом направлении с мета без предварительного разворота. Это достигается одновременной подачей жидкости в о.бе вз.аимно перпендикулярные пары горизонтальных цилиндров. Например, при движении вперед вправо необходимо подать жидкость одШ
(новременно в полости Б и В цилинд™ ров 4 и 6 и в полосги Е и Ж цилиндров 5 и 7. Количеством подаваемой жидкости в полости Б и в и в полости Е и ж определяется скорость движения поршней цилиндров. Регулируя подачу жидкости, можно получить необходимое направление движения.
При опирании опорным диском на нaклoннs поверхность вертикальными гидроцилиндрами 3 опорный колокол 1 и крестовина 9 устанавливаются в горизонтальное положение, а центральная стойка 10 занимает вертикальное положение, наклоняясь в любом направлении относительно опорного диска за счет шарнира Гука. Вместе с тем, шарнир Гука позволяет передать крутящий момент от стойки к опорному диску при развороте их относительно дру друга.
Помимо указанного эффекта, применение описываемой конструкции для роторного экскаватора позволяет независимо от рельефа местности производить поворот роторной стрелы в горизонтальной плоскости, что обеспечивает точную установку на толщину стружки. Кроме того, для любых типов машин с конвейерным оборудованием улучшается работа конвейеров , так как при боковом наклоне имеет место сход ленты в сторону.
Формула изобретения
Ходовая платформа, например, шагающего экскаватора по авт.св. № 195983 отличающаяся тем, что,с целью повышения устойчивости при работе на наклонной поверхности, .центральная стойка соединена с опорным диском с возможностью наклона в двух взаимно перпендикулярных плоскостях, например, посредством шарнира Гука.
Риг.1
