Известны трехкоординатные микроманипуляторы, состоящие из двух последовательно включаемых электромагнитов, стола, винтового механизма вертикальных перемещений, расположенных в одном корпусе, и мехаиизма горизонтальных перемещений пантографного типа с рукояткой управления. Управление такими манипуляторами не сосредоточено в одной рукоятке, что снижает точность вертикальных перемещений.
В предложенном манипуляторе рукоятка управления соединена гибким тросом через эксцентриковый механизм с обоими электромагнитами. Это повышает точность вертикальных перемещений и позволяет сосредоточить управление в одной рукоятке.
Для устранения поворота гайки относительно корпуса последний снабжен роликами, взаимодействующими с плапками, установленными на гайке.
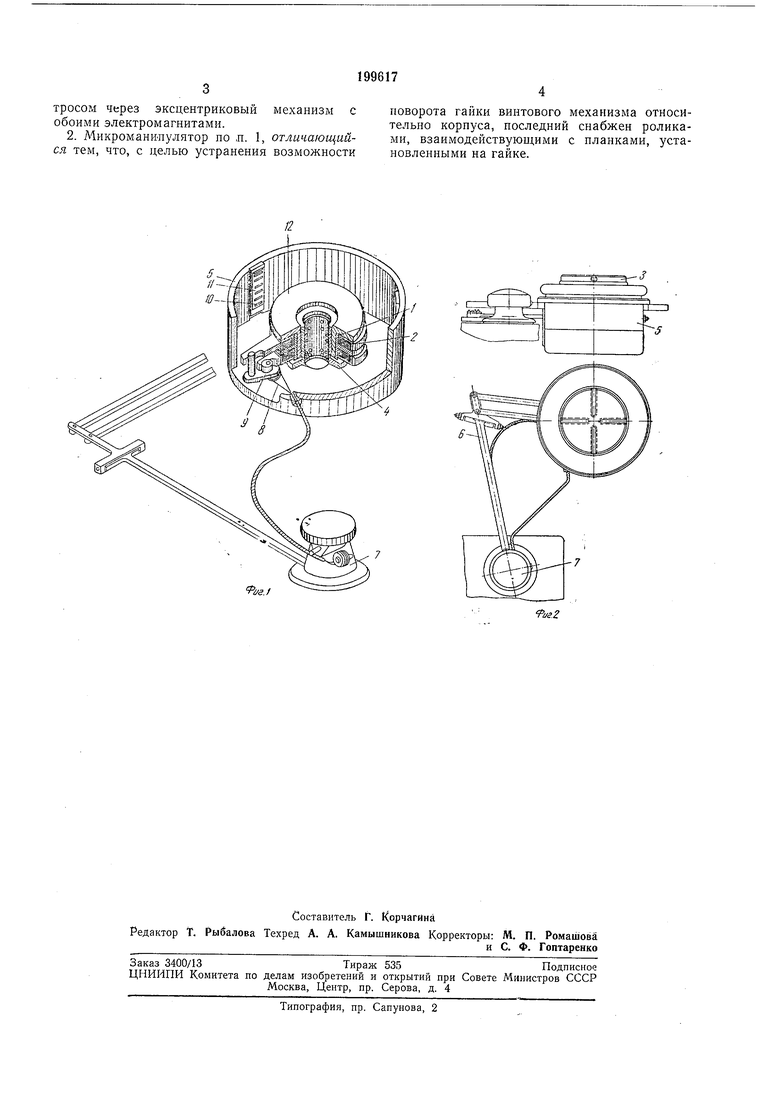
На фиг. 1 изображен описываемый манипулятор с частичным разрезом; на фиг. 2 - то же, в двух проекциях.
Манипулятор содержит два последовательно включаемых электромагнита 7 и 2, стол 3, винтовой механизм 4 вертикальных перемещений, размещенные в одном корпусе 5, и механизм 6 горизонтальных перемещений ,пантографного типа с рукояткой 7 управления. Рукоятка соединена гибким тросом 8 через
эксцентриковый механизм 9 с обоими электромагнитами. Корпус 5 снабл ен роликами 10, взаимодействующими с планками //, установленными на гайке 12.
Манипулятор работает следующим образом, Перемещением стола 3 в горизонтальной и вертикальной плоскостях управляют рукояткой 7. При повороте рукоятки трос 8 через механизм 9 поворачивает или электромагнит J или электромагнит 2. При этом происходит или подъем или опускание гайки 12, передаваемое столу.
Точные вертикальные перемещения осуществляются при включении электромагнита 2 и выключении электромагнита /, грубые перемещения - при обратном порядке включения электромагнитов.
Предмет изобретения
1. Трехкоордииатпый микроманипулятор, состоящий из двух последовательно включаемых электромагнитов, стола, винтового механизма вертикальных перемещений, размещенных в одном корпусе, и механизма горизонтальных перемещений пантографного типа с рукояткой управления, отличающийся тем, что, с целью повышения точности вертикальных перемещений и сосредоточения управления в одной рукоятке, последняя соединена гибким
тросом через эксцентриковый механизм с обоими электромагнитами.
2. МикроманИПулятор по п. 1, отличающийся тем, что, с целью устранения возможности
поворота гайки винтового механизма относительно корпуса, последний снабжен роликами, взаимодействующими с планками, установленными на гайке.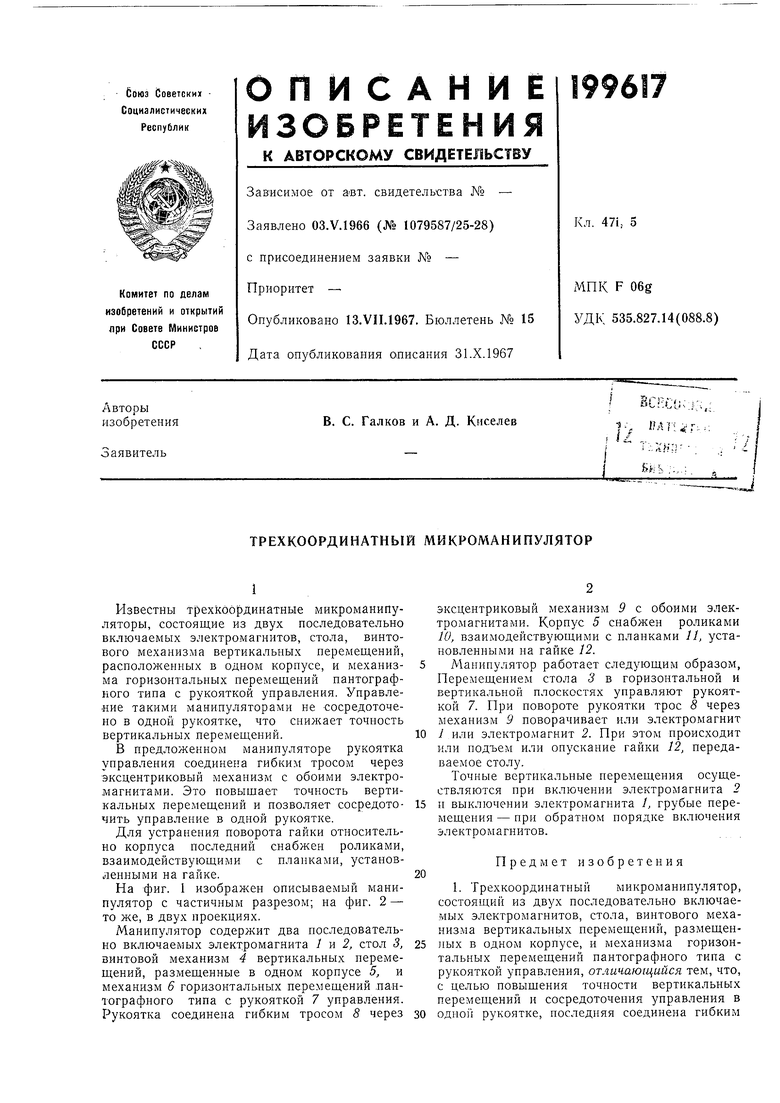
| название | год | авторы | номер документа |
|---|---|---|---|
| ОДТГНТНО- .;j^ I'^ Г^Х!:ЙМР(;КДЯ ^^^ IRVi!; "iHOTFk'i | 1966 |
|
SU179586A1 |
| ОБЛИЦОВОЧНЫЙ МАНИПУЛЯТОР | 1990 |
|
RU2023582C1 |
| МИКРОМАМ И П,УЛЯТОР | 1968 |
|
SU206980A1 |
| МИКРОМАНИПУЛЯТОР | 1972 |
|
SU428933A1 |
| Микроманипулятор | 1978 |
|
SU749658A1 |
| Сверлильный станок | 1982 |
|
SU1105283A1 |
| МЙКРОМАНИПУЛЯТОРПАЯЙ^ЙО-ИШ^-'Й'Г0010С»иЯ!_)О—>&-''-"БИВ лис 'tKA | 1970 |
|
SU282028A1 |
| ОРУЖЕЙНАЯ УСТАНОВКА | 2009 |
|
RU2419056C1 |
| УСТРОЙСТВО ДЛЯ ПОЗИЦИОНИРОВАНИЯ ИЗДЕЛИЕМ В ПРОЦЕССЕ СВАРКИ | 1990 |
|
SU1743112A1 |
| МИКРОМАНИПУЛЯТОР | 1970 |
|
SU277515A1 |
./
