Защита от ударов ковша по стреле в известных драглайнах осуществляется в функции суммы длин канатов при неизменной уставке срабатывания защиты и со ступенчатым изменением скоростей приводов при срабатывании защиты. Введение ступенчатого изменения скорости приводов в процессе защиты неизбежно оказывает влияние на производительность экскаватора. Неизменная уставка срабатывания при таком выполнении защиты выбирается из условия безопасности работы при максимальных скоростях приводов. При величинах скоростей приводов, меньше максимальных значений, защита останавливает ковш в зоне возможных рабочих траекторий, что отрицательно сказывается на маиевреиности экскаватора. Кроме того эллиптическая кривая защиты, соответствующая постояиной сумме длин канатов, равной уставке срабатывания системы защиты, у головы и у основания стрелы проходит в зоне возможных рабочих траекторий ковша, что ограничивает движение ковша при копании, уменьшает возможную высоту разгрузки ковша, увеличивает опасность входа ковша в зону самопроизвольной разгрузки, т. е. ухудшает рабочие характеристики экскаватора, затрудняя для машиниста маневровые операции у головы и у основания стрелы.
Существующая система защиты требует регулярной переналадки после перепасовки канатов и при вытяжке канатов в процессе работы. Точность этой системы защиты и ее надежность определяются точностью изготовления громоздких и протяженных механических передач, наличие которых затрудняет производство и эксплуатацию системы защиты.
Предложеи способ управления приводами, при котором управление приводом тяги осуществляют в функции суммы статических моментов нагрузки двигателей приводов, а уставку срабатывания защиты регулируют в функции алгебраической суммы скоростей приводов. Для повышения надежности работы приводов уставку защиты регулируют в функции загрузки ковша.
Благодаря введению такого регулирования уставка срабатывания защиты, иропорциональная сумме статических нагрузочных моментов, автоматически изменяется в зависимости от скорости движения ковша по направлению к стреле, таким образом, что независимо от величин скоростей приводов в момент начала действия защиты ковш в результате ее действия плавно, без перерегулирования подходит к кривой минимально допустимого приближения к стреле и продолжает двигаться вдоль этой кривой в направлении, зараиее заданном машинистом. Нормальный ход рабочего процесса не нарушается, и исключается отрицательное влияние защиты на маневренность экскаватора.
Для уменьшения динамических нагрузок в рабочем оборудовании экскаватора кривая минимально допустимого приближения ковша к стреле располагается в непосредственной близости к кривой стопорного статического момента привода подъема для груженого ковша.
Поскольку динамические нагрузки в рабочем оборудовании определяются загрузкой ковша и траекторией его движения относительно оси стрелы, то при всех значениях загрузки ковша, меньше максимальной, динамические нагрузки в рабочем оборудовании экскаватора, соответствуюш,ие расположению ковша на указанной кривой минимально допустимого приближения, будут меньше, чем при груженом ковше.
Ввиду того, что при подъеме мало загруженного или порожнего ковша уставка срабатывания системы защиты, пропорциональная сумме токов главных цепей приводов (или сумме статических нагрузочных моментов), может быть достигнута только при существенном приближении ковша к стреле, для обеспечения защиты от захода ковша любой загрузки, включая и порожний ковш, в зону у стрелы, ограниченную кривой минимальнодопустимого приближения, в систему вводится регулирование уставки срабатывания защиты в функции загрузки ковша. Судить о степени загрузки ковша по изменению тока главной цепи привода подъема нельзя, поскольку величина тока главной цепи привода подъема или усилия в канатах подъема зависит не только от веса ковша, но и от пространственного расположения траектории его движения относительно оси стрелы.
Существует однозначная зависимость, определяемая весом ковша, между усилием F в канате подъема и производной этого усилия по сумме длин канатов подъема и тяги
1 Г
Для одного и того же значения
V й /
этой производной величина усилия в канатах подъема, полученная из этой зависимости, определяется только весом ковша.
Поскольку кривая минимально допустимого приближения ковша к стреле определяется уставкой срабатывания защиты для случая подъема груженого ковша, для защиты от захода легкого ковша за пределы этой кривой уставка срабатывания системы регулируется в функции загрузки ковша по величине разности усилий в подъемных канатах при подъеме груженого ковша (Р„ гр) и при подъеме ковша действительно загрузки (/пд ), вычисленной для каждого значения производной dFn
Таким образом, уставка срабатывания за щиты по предлагаемому способу может быть выражена следующим образом:
У Ку (тлет + Ттст ) + К, ( 1/л + ) + (лгр + ),
где У - уставка срабатывания защиты;
- коэффициент зависимости уставки срабатывания защиты от суммы статических составляющих токов главных цепей приводов подъема 1пст и
тяги ITCT . пропорциональных загрузке приводов;
/С.,, - коэффициент зависимости уставки в функции суммы скоростей приводов подъема „ и тяги VT ;
Кр - коэффициент регулирования уставки срабатывания в функции загрузки ковша;
пгр -значение усилия в канатах подъема при подъеме груженого ковша, определяемое действительной загрузкой ковша для того же значения указанной производной , что и /игрЛ S
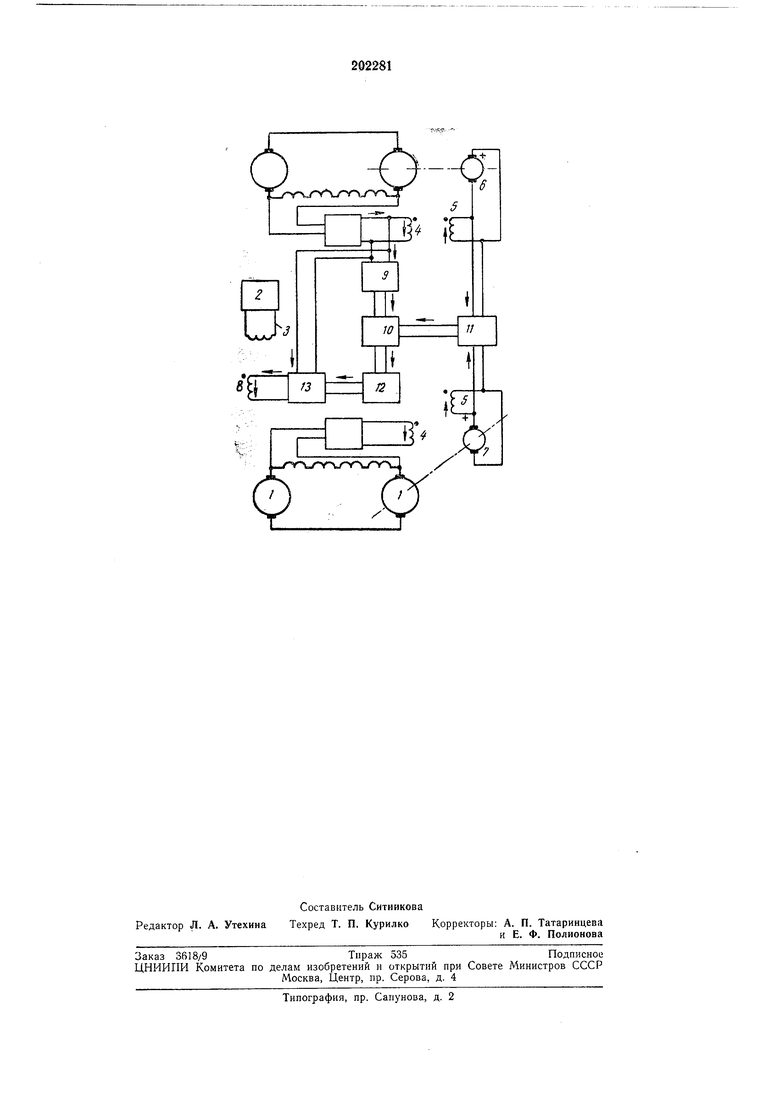
На чертеже показана структурная схема устройства для осуществления предлагаемого способа.
Управление приводом тяги 1 в устройстве осуществляется с помощью однотактного магнитного усилителя 2, в нагрузочную цепь которого включена обмотка задания скорости привода тяги 3. Токи управления обмоток 4 пропорциональны статическим составляющим загрузки приводов соответственно и определяют уставку срабатывания защиты, пропорциональную загрузке приводов, для случая подъема груженого ковша с минимальными скоростями приводов, то есть кривую минимально-допустимого приближения ковша к
стреле.
Регулирование уставки срабатывания защиты в функции алгебраической суммы скоростей приводов осуществляется суммарным действием ампервитков управления обмоток 5
магнитного усилителя. Цепи этих обмоток управления питаются выходными напряжениями тахогенераторов приводов подъема 6 и тяги 7, пропорциональными скорости соответствующего привода.
При работе приводов в сторону уменьшения длин канатов ампервитки обмоток 5 направлены согласно с ампервитками обмоток 4, благодаря чему уставка срабатывания защиты увеличивается тем больше, чем больше
абсолютная величина скорости уменьшения суммы длин канатов подъема и тяги. По окончании переходного процесса после срабатывания защиты независимо от момента ее срабатывания ковш выходит на кривую минимально допустимого приближения и движется по ней вдоль стрелы в направлении, заданном машинистом.
вая ее стаоилизацию и хорошее качество регулирования.
Регулирование уставки срабатывания защиты в функции загрузки ковша осушествляется с помошью обмотки управления 8. Ампервитки этой обмотки действуют согласно с ампервитками обмоток 4, уменьшая уставку срабатывания заш,иты при подъеме недогруженного или порол иего ковша.
Величина тока в обмотке управления 8 определяется разностью усилий /„гр -РПЛ в подъемных канатах при подъеме полностью загруженного ковша н при подъеме ковша действительной загрузки, вычисленных для
одного значения производной - .
del
Усилие /лд в подъемных канатах, определяемое действительной загрузкой ковша, пропорционально статической составляюш,ей тока главной цепи привода подъема. Усилие fnr в подъемных канатах может быть вычислено с помошью заданной зависимости
.
если известно значение произd l
dFn
водной
del
dF
Выражение для производной d.L представить в следуюш,ем виде: rffn1 dt F. + Vn Исходя из него, определение производной может быть сведено к дифференцированию во времени усилия F в канатах подъема, пропорционального статической составляюшей нагрузке привода подъема, с последуюш,им делением полученной произна сумму скоростей приводов подъема и тяги. Для вычисления производной служат дифференциатор 9, делитель 10 и сумматор //.
Напряжение, пропорциональное усилию в канатах подъема, дифференцируется по времени в дифференциаторе, с выхода которого
сигнал, пропорциональный производной -- , dt
подается на вход делителя. На другой вход делителя подается напряжение с сумматора, пропорциональное сумме скоростей приводов подъема и тяги. Выходное напряжение делителя, пропорdF
циональное искомой производной
дается на вход нелинейного блока 12, формируюшего заданную зависимость
dBl для случая подъема груженого ковша.
Полученное в этом блоке значение усилия в подъемных канатах при подъеме груженого
ковша Fnrp сравнивается с /„д , определяемым действительным весом поднимаемого ковша, в блоке сравнения 13, выходное напряжение которого, пропорциональное искомой разности усилий , определяет величину тока в обмотке управления 8.
Нредмет изобретения
МОЖНО 35 Q ., 1.Способ взаимосвязанного управления электроприводами подъема и тяги драглайна с зашитой от ударов ковша по стреле, отличающийся тем, что, с целью повышения маневренности и производительности драглайна, а также упрощения эксплуатации, управление приводом тяги осуществляют в функции суммы статических моментов нагрузки двигателей приводов, а уставку срабатывания защиты регулируют в функции алгебраической суммы скоростей приводов. 2.Способ управления по п. 1, отличающийся тем, что, с целью повышения надежности работы приводов, уставку срабатывания зашиты регулируют дополнительно в функции загрузки ковша.
rYXrv-4,rvv3r
I id
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления механизмами подъема и тяги драглайна | 1978 |
|
SU874893A1 |
| Способ взаимосвязанного управления электроприводами подъема и тяги драглайна | 1971 |
|
SU771833A1 |
| Способ оптимального управления электроприводами драглайна | 1979 |
|
SU926163A1 |
| Устройство защиты стрелы от растяжки ковша экскаватора-драглайна | 1977 |
|
SU777157A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ КОВША ОТНОСИТЕЛЬНО СТРЕЛЫ И БЛОКОВДРАГЛАЙНА | 1967 |
|
SU195077A1 |
| Способ защиты стрелы экскаваторадраглайна | 1977 |
|
SU717239A1 |
| Способ защиты драглайна от аварийных режимов при транспортировке ковша и устройство для его осуществления | 1978 |
|
SU744076A1 |
| Устройство защиты стрелы экскаваторадраглайна от растяжки | 1977 |
|
SU737576A1 |
| Устройство управления электроприводом тяги экскаватора-драглайна | 1981 |
|
SU956697A1 |
| Устройство для защиты стрелы экскаватора-драглайна | 1983 |
|
SU1194972A2 |