Изобретение относится к области управления электроприводами подъема и тяги мощных драглайнов с защитой от ударов ковша по стреле.
Известен способ управления электро-5 приводгили подъема и тяги драглайна с защитой от удара ковша по стреле, при котором осуществляй)т управление Щ5ИВОДОМ тяги в функции суммы длин подъеиетого и тягового канатов,уставку Ю срабатывания защиты изменяют в функции алге(аическсй суммы скоростей приводов подъема и тяги и в области движения ковша у вершины и основания стрелы дополнительно вводят сигнал, про- 15 псчрциональный уменьшению длины подъемяого или тяговог6 - канатов ij .
Недостатком известного способа явялется недостаточная надежность и сложность реализации и эксплуатации, 20 вызываемле необходимостью установки механических датчиков длин подъемного и тягового канатов на лебедках механизмов подъема и тяги и необходимостью переналадки при та- 25 ком способе управления .после каждой замены канатов и при их вытягивании 3 тфоцессе эксплуатации.
Наиболее близким к предложенному по технической сущности и по дос- 30
тигаемому результату является известный способ взаимосвязанного управления электроприводами подъема и тяги драглайна с защитой от ударов ковша по стреле путем определения усилий в подъемном и тяговом канатах, фикСсщии скоростей электроприводов подъема, и тяги, изменения уставки срабатывания защиты в зависимости от алгебраической суммы измерения скоростей электроприводов, сравнение величины усилий в подъемном канате с заданной уставкой срабатывания защиты и фс мированни дополнительного управляющего сигнала приводом тяги при превышении величины заданной уставки срабатывания защиты указанной величины усилия 2 .
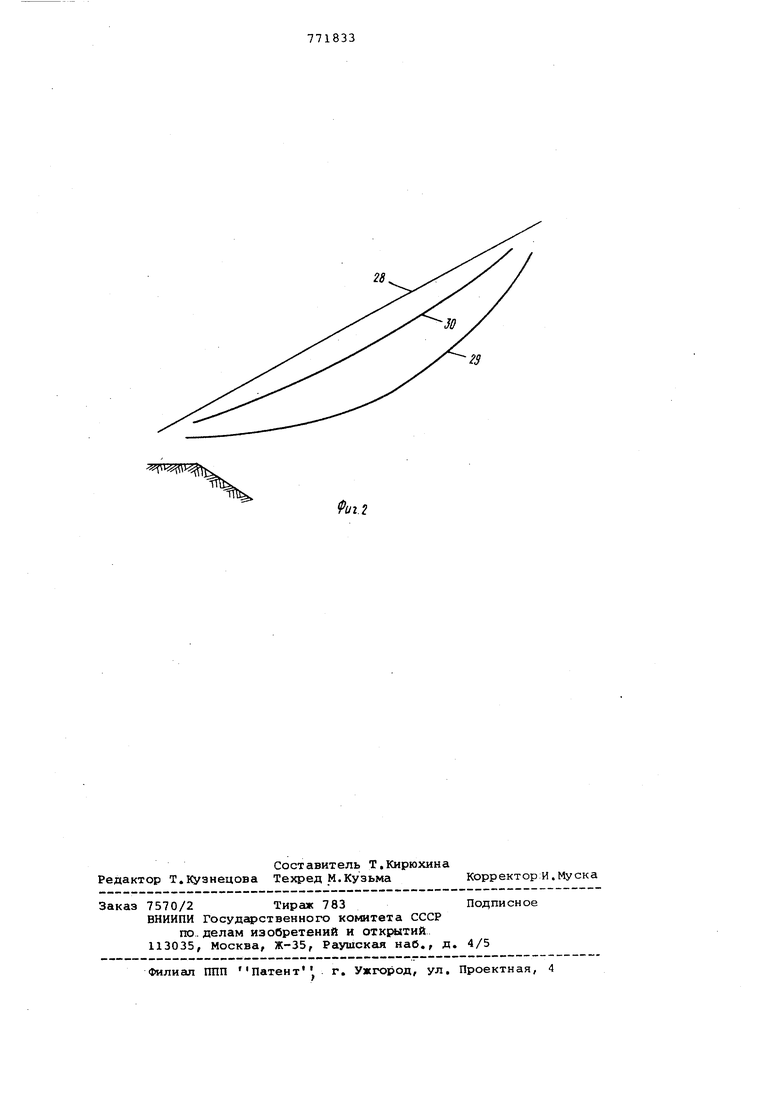
Недостатком этого известного способа управления является недостаточная точность и Нбщежность, .определяемая прежде всего сложностью, недостаточней точностью и надежностью определения и функционального преобразования производной усилия в подъемном канате по сумме длин подъемного и тягового канатов, а также возможностью появления ложных сигналов управления в. процессе копания, |согда большие значения усилия в тяговом канате и существенные значения производной усилия в подъемном канате по сумме длин подъемного и тягового канатов могут привести к превышению уставки срабатывания защиты. Цель изобретения - повышение точное . и и надежности управления. Цель достигается тем, что умножают величины усилий в тяговом и подъемном канатах на коэффициенты веса, сравнивают полученные сигналы и при превышении умноженным на коэффициент веса усилием в тяговом канате величины умноженного на коэффициент вес усилия в подъемном канате уменьшают уставку срабатывания защиты, при этом отношение коэффициента веса при усилии в тяговом канате к коэффицие ту веса при усилии в подъемном канате выбирают равным отношению усилия в подъемном канате к усилию в тяговом канате при загруженном ковше на границе зоны защиты. На фиг. 1 приведен вариант устройства, реализующего предложенный способ; на фиг. 2 показано расположение относительно стрелы границы зоны защиты. Электропривод тяги содержит элек родвигатель 1, подключенный к его якорной цепи генератор 2 и возбудит 3 генератора тяги. Электропривод : подъема содержит электродвигатель 4 подключенный к его якорной цепи генератор 5 с возбудителем (последний на схеме не показан). Устройство со держит датчик б скорости электропри вода тяги, датчик 7 скорости электропривода подъема, два суммирующих усилителя 8 и 9 (например, однотакт ные магнитные усилители),датчики 10 и 11 усилий в тяговом и подъемном канатах. Датчик 10 усилия в тяговом канате выполнен в виде подключенного к обмоткам 12 и 13 допол нительных полюсов генератора 2 и электродвигателя 1 электропривода тяги резистора 14 и подключенного к якорю электродвигателя 1 конденсатора 15. Общая точка между якорем электродвигателя 1 и его обмоткой 1 дополнительных полюсов, а также общая точка везистора 14 и конденсато ра 15 подключены к выходу датчика 10 усилия в тяговом канате. Аналогично датчик 11 усилия в подъемном канате выполнен в виде подключенного к обмоткам 1б и 17 дополнитель ных полюсов генератора 5 и электродвигателя 4 электропривода подъема резистора 18 и подключенного к якорю электродвигателя 4 конденсатора Общая точка между якорем электродви гателя 4 и его обмотксй5 17 дополнит ных полюсов, а также общая точка ре зистсфа 18 и конденсатора 19 подклю чены к выходу датчика il усилия в подъемном канате. Выход суммирующего усилителя 8 одключен к управляющей обмотке 20 озбудителя 3 генератора тяги 2, Входы суммирующего усилителя 8 подключены к источнику постоянного напряжения 21, пропорционального стопорному усилию в подъемном канате РПСГ выходу 22 датчика 11 усилия. Р„ в подъемном канате, к выходам 23, 24датчиков 7 и 6 скоростей V и VT приводов подъема и тяги и к выходу 25второго суммирующего усилителя 9. Два входа 26 и 27 второго суммирующего усилителя 9 подключены к выходам датчиков 10 и 11 усилий в тяговом FT и в подъемном Р„ канатах. На фиг, 2 показано положение относительно стрелы 28 границы 29 зоны защиты, соответствующей стопорному усилию .f в подъемном канате при загруженном ковше, а также положение кривой 30, соответствующей стопорному усилию в подъемном канате при порожнем ковше, С помощью датчиков 6 и 7 измеряют скорости электроприводов тяги и подъема, а с помощью датчиков 10 и 11 определяют усилия в тяговом и подъемном канатах. Выходные сигналы датчиков 10 и 11, пропорциональные усилиям :в тяговом F и в подъемном F канатах, поступают на входы второго сумг 1ирующего усилителя 9 с противоположными знаками. При этом коэффициенты усиления второго суммирующего усилителя 9 по каждому из его входов обеспечивают умножение сигнала, пропорционального усилию в тяговом канате F . на коэффициент веса В, а сигнала, пропорционального усилию Fj, в подъемном канате - на коэффициент веса А, С помощью второго суммирующего усилителя 9 сравнивают полученные сигналы AFj и BF, а выходной сигнал второго суммирующего усилителя 9, пропорциональный их разности ., подают на один из входов первого суммирующего усилителя 8. Отношение коэффициента веса В при усилии FY в тяговом канате к коэффициенту веса А при усилии Fj, в подъемном канате выбирают равным отношению усилия в подъемном канате к усилию в тяговом канате при загруженном ковше на границе 29 (фиг. 2) зоны защиты, Благодаря такому выбору отношения коэффициентов веса при загруженном ковше, выходной сигнал второго суммируюв|его усилителя 9 на границе 29 зоны защиты равен нулю. В случае уменьшения загрузки ковша при его положении на границе 29 зоны защиты выходной сигнал второго суммирующего усилителя 9, пропорциональный разности AF/- BF, не равен кулю, причем этот сигнгш возрастает по мере уменьшения загрузки ковша и достигает максимального значения при порожнем ковше,. Подключенный к одному из входов 21 первого суммирующего усилителя 8 источник постоянного напряжения обе печивает задание уставки срабатывания защиты, пропорциональной стопор ному усилию FIICT подъемном канат и соответствующей положению загруже ного ковша на границе 29 зоны защит Подключенные ко входам 23 и 24 первого суммирующего усилителя 8 выход ные сигналы датчиков 6 и 7, пропорциональные скоростям приводов тяги V и подъема V,, обеспечивают изменение уставки срабатывания защиты в зависимости от алгебраической суммы этих скоростей V + V, а выходной сигнсш второго суммирующего усилителя 9, подаваемый на вход первого суммирующего усилителя 8, обеспечивает изменение уставки срабатывания защиты в функции разности AFj, BF . При этом дополнительный управляющий сигнал привода тяги, поступающий с выхода первого суммирующего усилителя 8 на управляющую обмотку 20 возбудителя 3, характеризуется зависимостью: К()Uy - Kp-Fn ,(. K,(RF, - BF где Кр, Ку - коэффициенты пропорцио нальности. При приближении ковша к стреле увеличивается усилие F в подъемном канате, причем, при загруженном ковше это усилие достигает стопорно го значения Ff,. , соответствующего заданной уставке срабатывания защиты на границе 29 зоны защиты, а раз ность AFp-BF на указанной границе в этом случае равна нулю. С помощью первого суммирующего усилителя 8 выходной сигнал датчика 11, пропорциональный усилию Fj, в подъемном канате, сравнившот с уставкой срабатывания защиты, а при превышении величиной усилия в подъемном канате уставки срабатывания защиты на привод тяги подают дополнительный управляющий сигнал, прекращгиощий приближение загруженно го кошиа к стреле на границе 29 зоны защиты. В случае уменьшения загрузки ковша кривая .положений этого ковша, на которой усилие F в подъемном ка нате., достигает стопорного значения приближается к стреле и при порожнем ковше соответствует кривой 30 на фиг. 2, при которой не обеспечивается защита от ударов конца по стреле. Однако мере уменьшения зги рузки ковша увеличивается величина .поступгиощего на вход первого суммирующего усилителя 8 с выхода второго суммирующего усилителя 9 сигнал пропорционального разности AF,-BFкоторый уменьшает уставку срабатыBaiHfH защиты, благодаря чему независимо от загрузки ковша дополните.пмилч управляющий сигнал Uy, o6oc:nc4iii ain iuu защиту от ударов ковша по стреле, Судет поступать с выхода первого CVMNUIрующего усилителя 9 на управляющий вход электропривода тяги при положении ковша на границе 29 зоны заи1иты, т.е. при любой загрузке ковша предложенный способ обеспечивает oi-раничение приближения ковша границей 29 зоны за1диты и тем самым обеспечивают Защиту от удара ковша по стреле как при загруженном ковше, так и при порожнем ковше. Изменение уставки срабатывания защиты в зависимости от алгебраической cyMivbii скоростей электроприводов подъема и тяги обеспечивает срабатывание защиты на тем большем расстоянии от стрелы, чем больше скорость приближения ковша к стреле, благодаря чему исключаются перерегулирования и колебания в процессе защиты, обеспечивается практически монотонный переходный процесс, исключающий возможность возникновения дополнительных динамических нагрузок ё стреле и рабочем оборудовании драглайна. Таким образом, в отличие от известного способа управления, предложенный способ управления требует выполнения простых операций, выполнение которых с требуемой точностью не-вызывает, трудностей, что, в свою очередь, повышает надежность управления. Кроме того, при предложенном способе управления, в отличие от известного способа, исключаются ложные срабатывания зеициты в процессе копания, когда отсутствует о-пасность удара ковша по стреле, что также повышает надежность управления. Формула изобретения Способ взаимосвязанного управления электроприводами подъема и тяги драглб1йна с защитой от ударов ковша по стреле путем определения усилий в .подъемном и тягоаом канатах, фиксации скоростей электроприводов подъема и тяги, изменения уставки срабатывания защиты в зависимости от алгебраической суммы измеренных скоростей электроприводов, сравнения величины усилий в подъемном канате С заданной уставкой срабатывания заэдиты и формирование дополнительного управляющего сигнала приводом тяги при превышении величины заданной уставки срабатывания, защиты указанной величиной.усилия, отличающийся тем, что, с целью повышения точности и надежности управления, умножают величины усилий в тяговом и подъемном канатах на коэффициент веса, сравнивают полученные сигналы и при превышении умноженным на коэффициент веса усилием в тяговом канате величины умноженного на коэффициент веса усилия в подъемном канат те уменьшают уставку срабатывания защиты, при этом отношение коэффициента веса при усилии в тяговом канате к коэффициенту: веса при усилии в подъемном канате выбирают равным отношению усилия в подъемном канате к усилию в тяговом канате при
загруженном ковше на границе зоны защиты.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР 186551, кл. G 05 В 11/00, 1965.
2,Авторское свидетельство СССР 202281, кл. Н 02 Р 5/00, 1966 (прототип).
.2

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ защиты драглайна от аварийных режимов при транспортировке ковша и устройство для его осуществления | 1978 |
|
SU744076A1 |
| Способ управления электрическими приводами драглайна и устройство для его осуществления | 1978 |
|
SU742542A1 |
| СПОСОБ ВЗАИМОСВЯЗАННОГО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДАМИ ПОДЪЕМА И ТЯГИ ДРАГЛАЙНА | 1967 |
|
SU202281A1 |
| Устройство для управления механизмами подъема и тяги драглайна | 1978 |
|
SU874893A1 |
| Способ оптимального управления электроприводами драглайна | 1979 |
|
SU926163A1 |
| Устройство для управления электрическим приводом тяги драглайна | 1975 |
|
SU717228A1 |
| Способ защиты стрелы экскаваторадраглайна | 1977 |
|
SU717239A1 |
| Устройство управления электроприводом тяги экскаватора-драглайна | 1981 |
|
SU956697A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ КОВША ОТНОСИТЕЛЬНО СТРЕЛЫ И БЛОКОВДРАГЛАЙНА | 1967 |
|
SU195077A1 |
| Устройство защиты стрелы экскаваторадраглайна от растяжки | 1977 |
|
SU737576A1 |