Известны захваты для грузоподъемных кранов, работающие на принципе использования силы ветра, угоняющего кран, содержащие механическую передачу с приводом от ходового колеса, связанную посредством рычажной системы с электрогидротолкателем, и рычажные захватные органы.
Предложенный захват отличается тем, что на ведущем валу механической передачи захвата вмонтированы кривощипно-шатунный механизм, который приводит в движение рычажную систему захватных органов, выполненных подпружиненными, и полумуфта, управляемая рычажной системой толкателя. Эта нолумуфта взаимодействует с полумуфтой, закрепленной на зубчатом элементе передачи.
Благодаря такому выполнению повышается надежность работы захвата и унрощается процесс унравления им за счет реверсивности и автоматического раскрытия после срабатывания.
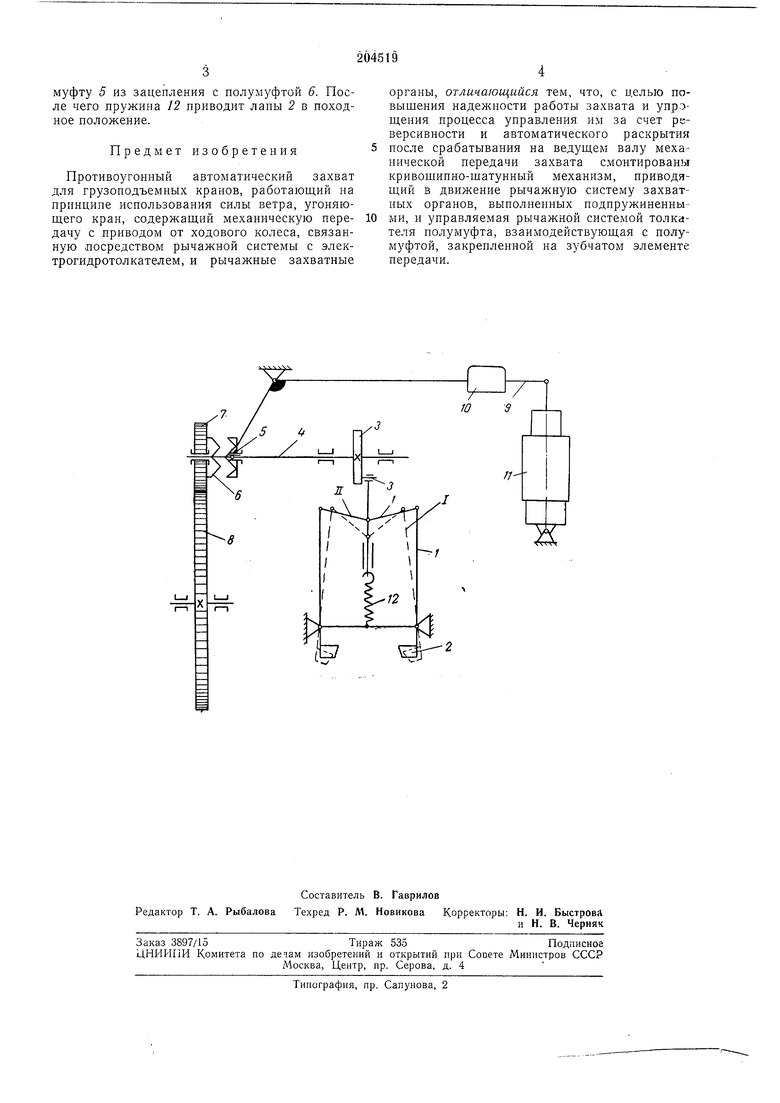
На чертеже изображена кинематическая схема описываемого захвата.
Противоугонный захват содержит подпружиненную рычажную систему / захватных органов - лап 2. Рычажпая система управляется посредством кривощипно-шатунного механизма 3, смонтированного на приводном валу 4. Па этом валу закреплена подвижная
полу муфта 5, взаимодействующая с полумуфтой 6, установленной на щестерне 7. Шестерня находится в постоянном зацеплении с зубчатым венцом 8 иеприводного ходового колеса крапа. Полумуфта 5 управляется с помощью двуплечего рычага 9, несущего груз 10, соединенного с толкателем 7/.
При работе крана щестерня 7 свободно проворачивается, вал 4 неподвижен, рычаги /
и лапы 2 захвата находятся в разведенно.м положепии I. Такое положение рычажной системы захвата обеспечивается пружиной 12. При появлении ветра, скорость которого превыщает допустимую рабочую, ветроизмерительный прибор отключает механизм передвижения крана и дает сигнал на захват.
Толкатель // (электрогидравлический) обесточивается и груз 10 вводит посредством двуплечего рычага 9 полумуфту 5 в зацепление с полумуфтой 6.
При угоне крана ходовое колесо через щестерню 7 и полумуфты проворачивает кривошипно-щатунный механизм 3, который (при любом направлении угона крана) приводит в
движение рычаги / захватных лап 2. Лапы с рычагами занимают положение И, обеспечивающее остановку крана.
муфту 5 из зацепления с полумуфтой 6. После чего пружина 12 приводит лапы 2 в походное положение.
Предмет изобретения
Противоугонный автоматический захват для грузоподъемных кранов, работающий на принципе использования силы ветра, угоняющего кран, содержащий механическую передачу с приводом от ходового колеса, связанную посредством рычажной системы с электрогидротолкателем, и рычажные захватные
органы, отличающийся тем, что, с целью повыщения надежности работы захвата и упрзщения процесса управления им за счет реверсивности и автоматического раскрытия
после срабатывания на ведущем валу механической передачи захвата смонтированы кривощнпно-шатунный механизм, приводящий в движение рычажную систему захватных органов, выполненных подпружиненными, и управляемая рычажной системой толкателя полумуфта, взаимодействующая с полумуфтой, закрепленной на зубчатом элементе передачи.
| название | год | авторы | номер документа |
|---|---|---|---|
| Противоугонный захват для грузоподъемных кранов | 1972 |
|
SU462794A1 |
| Противоугонное устройство крана | 1981 |
|
SU965956A1 |
| Противоугонный захват для кранов | 1972 |
|
SU446462A1 |
| Противоугонное устройство дляКРАНА | 1979 |
|
SU839996A1 |
| АВТОМАТИЧЕСКОЕ ПРОТИВОУГОННОЕ УСТРОЙСТВО | 1970 |
|
SU265402A1 |
| ЙАТЕЙТЙС- -inизобретения П. Н. Наливайко, В. Г. Бескоровайный, В. Н. Ивон, Л. Ф! Щт«вве^|1!^-'^(д51 '*' В. Я. Рудик, Н. С. Проценко, А. А. Афанасьев, И. Б.!Хандрос',Г. Д. Кочмала и А. А. Скворцовj | 1970 |
|
SU278089A1 |
| Устройство для резки глиняного бруса | 1979 |
|
SU827301A1 |
| Захват-кантователь тяжеловесных изделий | 1976 |
|
SU602465A1 |
| Устройство подачи пробниц-датчиков в зону разливки | 1975 |
|
SU520529A1 |
| Захватная балка для подъема и опускания затворов гидротехнических сооружений | 1960 |
|
SU140373A1 |
