Известны пневматические или гидравлические манипуляторы, состоящие из следящей системы типа сопло-заслонка и обратной связи, механической или электрической.
Предлагаемый микроманипулятор с пневмоприводом применяется при изготовлении полупроводниковых элементов. От известных он отличается тем, что для небольщих микрометрических перемещений пьезоэлектрический преобразователь наклеен на деформируемую пластину заслонки, а рычаг механической обратной связи фиксируется с подвижным органом посредством электромагнита.
При необходимости больших перемещений рычаг механической связи фиксируется неподвижно посредством другого электромагнита, закрепленного неподвижно.
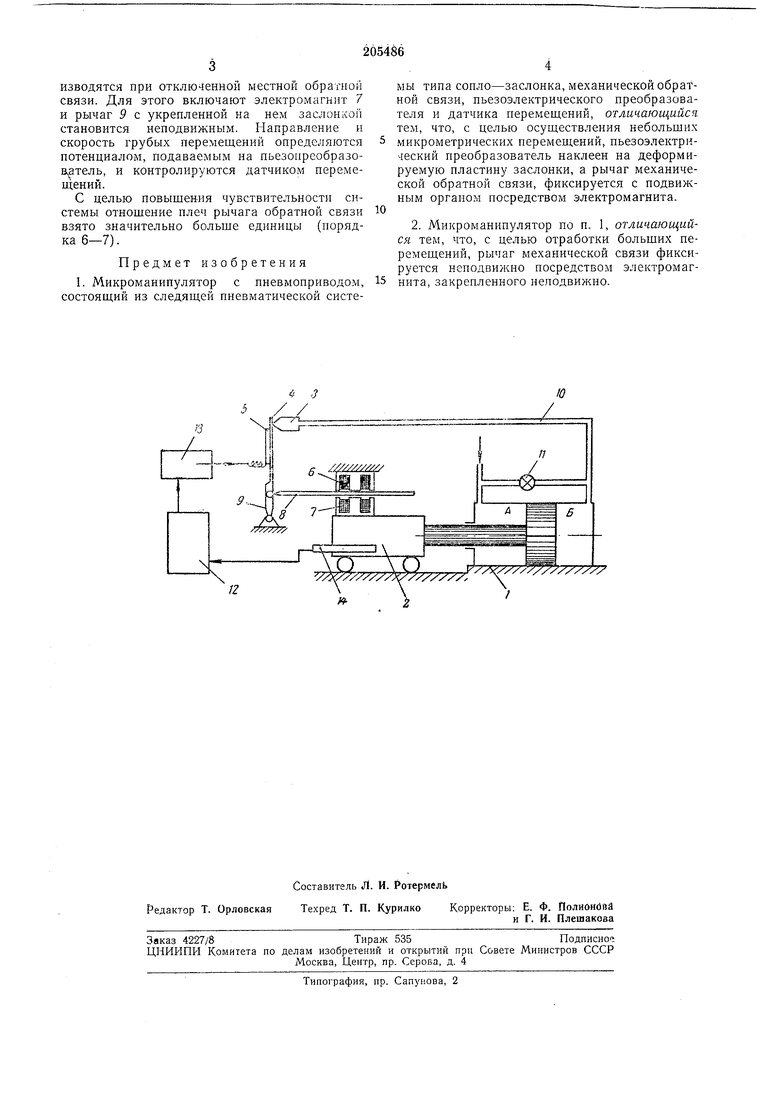
На чертеже приведена принаипиальная схема привода микроманипулятора.
Привод состоит из рабочего цилиндра /, стола 2, соединенного со щтоком цилиндра, пневмоусилителя типа сопло 3 - заслонка 4, пьезоэлектрического преобразователя 5, наклеенного на металлическую пластину заслонки, управляющих электромагнитов 6 н 7 и якоря 8, соединенного с рычагом 9 механической обратной связи.
Воздух из сети поступает под давлением по трубопроводу 10 в щ токовую полость А цилиндра. Бесщтоковая полость Б цилиндра через жиклер 11 соединена со щтоковой полостью и имеет выход в атмосферу через
щель между соплом и заслонкой. Величина щели определяет давление воздуха в полости Б. При увеличении щели давление в бесщтоковой полости падает и поршень передвигается вправо, при уменьщении щели давление в полости Б возрастает и за счет разности площадей полостей цилиндра возникает усилие, перемещающее порщень влево.
При включении магнита 6 положение заслонки зависит от поотожения стола (включается обратная связь).
При необходимости производится точная перестановка стола на заданное расстояние. Из системы управления 12 посылается сигнал
на интегрирующее устройство 13. Последнее вырабатывает потенциал, подаваемый на пьезопреобразователь, который, изменяя свои линейные размеры, изгибает металлическую пластинку и тем самым изменяет расстояние
между соплом и заслонкой, что вызывает перемещение стола.
Движение стола контролируется датчиком перемещения 14, передающим информацию в систему управления. При достижении заданной координаты сигнал, подаваемый на интегрирующее устройство, снимается, и стол удерживается в заданном положении за счет местной обратной связи: электромагнит 6 - якорь - заслонка - сопло. При включенной
местной обратной связи осуществляются также малые и точные иеремещения стола. Более грубые и большие перемещения производятся при отключенной местной обратной связи. Для этого включают электромагнит 7 и рычаг 9 с укрепленной на нем заслонкой становится неподвижным. Направление и скорость грубых перемещений определяются потенциалом, подаваемым на пьезоиреобразоБ атель, и контролируются датчиком перемещений.
С целью повышения чувствительности системы отношение плеч рычага обратной связи взято значительно больше единицы (порядка 6-7).
Предмет изобретения
1. Микроманипулятор с пневмоприводом, состоящий из следящей пневматической системы типа сопло-заслонка, механической обратной связи, пьезоэлектрического преобразователя и датчика перемещений, отличающийся тем, что, с целью осуществления небольщих микрометрических перемещений, пьезоэлектрический преобразователь наклеен на деформируемую пластину заслонки, а рычаг механической обратной связи, фиксируется с подвижным органом посредством электромагнита.
2. Микроманипулятор по п. 1, отличающийся тем, что, с целью отработки больших перемещений, рычаг механической связи фиксируется неподвижно посредством электромагнита, закрепленного неподвижно.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ПРИВОД МИКРОМАНИПУЛЯТОРА | 2004 |
|
RU2266808C1 |
| РОТАЦИОННЫЙ ПРИВОД МИКРОМАНИПУЛЯТОРА | 2004 |
|
RU2266811C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СЛЕДЯЩАЯ СИСТЕМА | 1973 |
|
SU377729A1 |
| ДВУХСТОРОННИЙ ПЬЕЗОЭЛЕКТРОМЕХАНИЧЕСКИЙ МИКРОПРИВОД | 2004 |
|
RU2259913C1 |
| Ленточно-отрезной станок | 1972 |
|
SU440234A1 |
| Установка для прецизионных работ с микрообъектами | 1980 |
|
SU1008688A1 |
| ПРИВОД МИКРОМАНИПУЛЯТОРА | 2000 |
|
RU2175601C2 |
| Автоматический прибор для измерения твердости изделий в виде полых полусфер | 1967 |
|
SU1841226A1 |
| УСТРОЙСТВО ДЛЯ ВВЕДЕНИЯ МИКРОЭЛЕКТРОДА В НЕРВНЫЕ КЛЕТКИ | 1968 |
|
SU211026A1 |
| СЛЕДЯЩИЙ ГИДРОПРИВОД СИСТЕМЫ УПРАВЛЕНИЯ САМОЛЕТА | 1984 |
|
SU1228395A1 |
