Известны системы автоматического программного управления стреловидным исполнительным органом комбайна, включающие гидроцилиндры горизонтального и вертикального перемещения, маслостанцию, гидромагистрали, золотники и профилированные кулачки.
С целью повышения производительности комбайна предлагается система, снабл :енная сервоцилиндрами-приемниками, управляемыми профилированными кулачками и соединенными гидромагистралью с сервоцилиндрамидатчиками, кинематически связанными с гидроцилиндрами горизонтального и вертикального перемещения.
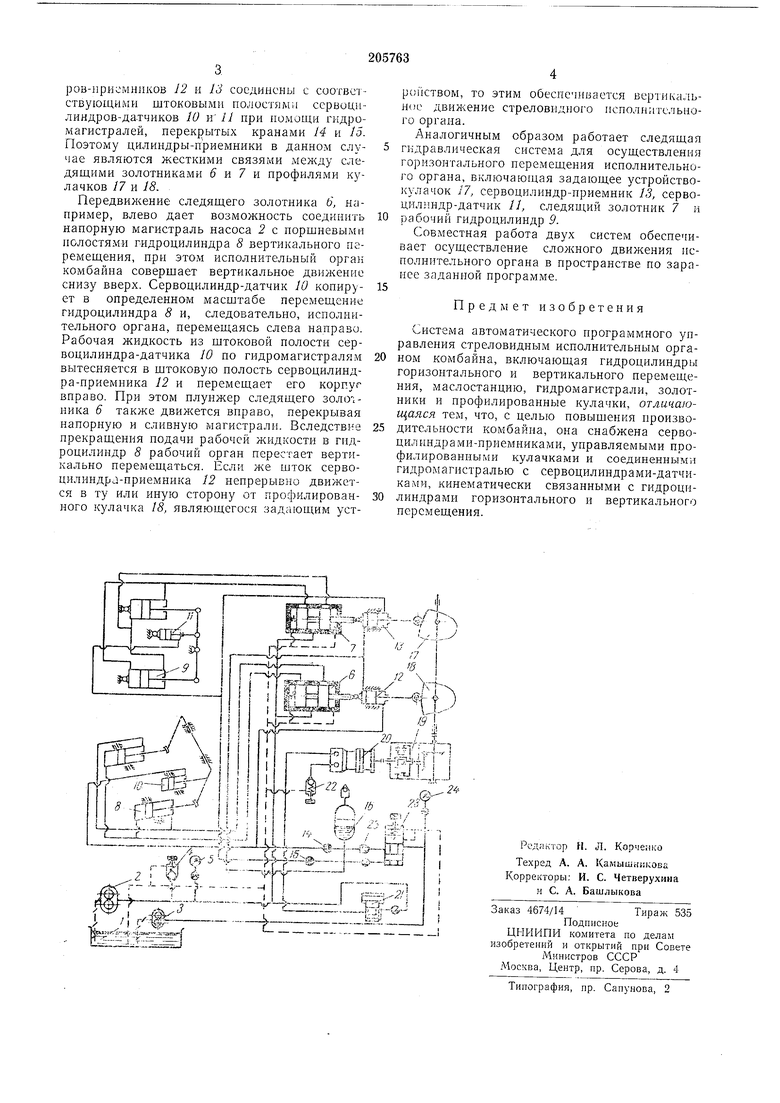
На чертеже показана предлагаемая система.
Она включает маслобак /, насос 2, вспомогательный насос 3, предохранительный клапан 4, манометр 5, следящие четырехкромочные золотники 6 и 7, корпуса которых закреплены неподвижно, гидроцилиндр 8 вертикального перемещения, гидроцилиндр 9 горизонтального перемещения, сервоцилиндры-датчики 10 и 11, сервоцилиндры-приемники 12 и 13, краны 14 и 15, пневмогидравлический аккумулятор 16, профилированные кулачки 17 и 18, планетарный редуктор 19, гидравлический сервомотор 20, регулируемый дроссель 21, подпорный клапан 22, золотник 23, ограничивающий величину давления в системе управления, манометр 24 и обратный клапан 25 (сплошными линиями показана напорная магистраль основного и вспомогательного насосов, а пунктиром - сливная магистраль).
Гидравлическая система работает следующим образом.
При работающих насосах гидросистемы часть потока рабочей жидкости от насоса 2 Проходит через регулируемый дроссель 21 и
поступает в сервомотор 20, вращая его с определенной скоростью, обусловленной расходом жидкости. Сервомотор через планетарный редуктор 19 поворачивает профилированные кулачки 17 и 18 вокруг общей оси. Время
одного оборота кулачков равно времени обработки поверхности забоя стреловидным исполнительным органом с заданной скоростью. При повороте профилированных кулачков на определенный угол штоки сервоцилиндров-приемников 12 и 13, находящиеся в постоянном контакте с кулачками при помощи пружин, установленных в корпусе следящих золотников 6 я 7, совершают поступательное движение в ту или иную сторону. При этом
штоки сервоцилиндров-приемников передвигаются не относительно корпусов, а вместе с ними как одно целое благодаря тому, что их поршневые полости связаны с пневмогидроаккумулятором 16 и находятся под постоянным
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРОХОДЧЕСКИЙ КОЛ1БАЙН | 1966 |
|
SU179717A1 |
| ВСЕСОЮЗНАЯ I | 1969 |
|
SU245490A1 |
| УНИВЕРСАЛЬНАЯ ГИДР&СИСТЕМ.4 СЕЛЬСКОХОЗЯЙСТВЕННОГО ТРАКТОРА | 1971 |
|
SU307755A1 |
| ГИДРАВЛИЧЕСКИЙ СЕРВОПРИВОД УПРАВЛЕНИЯ ГУСЕНИЧНЫХ МАШИН | 1966 |
|
SU188311A1 |
| ЛЕНТОЧНОШЛИФОВАЛЬНЫЙ СТАНОК ДЛЯ ОБРАБОТКИ НАРУЖНОЙ ПОВЕРХНОСТИ ДЛИННОМЕРНЫХ ИЗДЕЛИИ | 1973 |
|
SU395239A1 |
| СТЕНД ДЛЯ ИСПЫТАНИЯ МЕХАНИЗМОВ ПОВОРОТА И ОПОРНО-ПОВОРОТНЫХ КРУГОВ ЭКСКАВАТОРОВИ КРАНОВ | 1968 |
|
SU219831A1 |
| Гидравлический привод судовой рулевой машины | 1984 |
|
SU1197939A1 |
| Программное устройство системы программного управления стреловидным рабочим органом горной машины | 1976 |
|
SU638721A1 |
| УСТРОЙСТВО для ПЕРЕМЕЩЕНИЯ РАБОЧЕГО ОРГАНА ПРОХОДЧЕСКОГО КОМБАЙНА | 1973 |
|
SU362140A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ЗАГРУЗКИ САМОХОДНОГО ЗЕРНОУБОРОЧНОГО КОМБАЙНА | 1968 |
|
SU221409A1 |
