Известны гидроцилиндры грузоподъемника погрузчика, имеющие направляющий ролик, несомый плунжером и огибаемой грузовой цепью, ветви которой расположены параллельно по обе стороны ролика.
В предложенаом гидроцил.индре точка опоры основания цилиндра смещена от его оси на расстояние, равное расстоянию между осью цилвЕдра и осью грузовой цепи, а гильза кнлиНдра выполнена .подпружиианной.
Такая конструкция устраняет боковые изгибающие усилия во втулке гидроцилиндра, соз дает условия равновесия системы сил, действующих на цилиндр, без учета веса гильзы цилиндра и ко.мпенсирует вес гильзы.
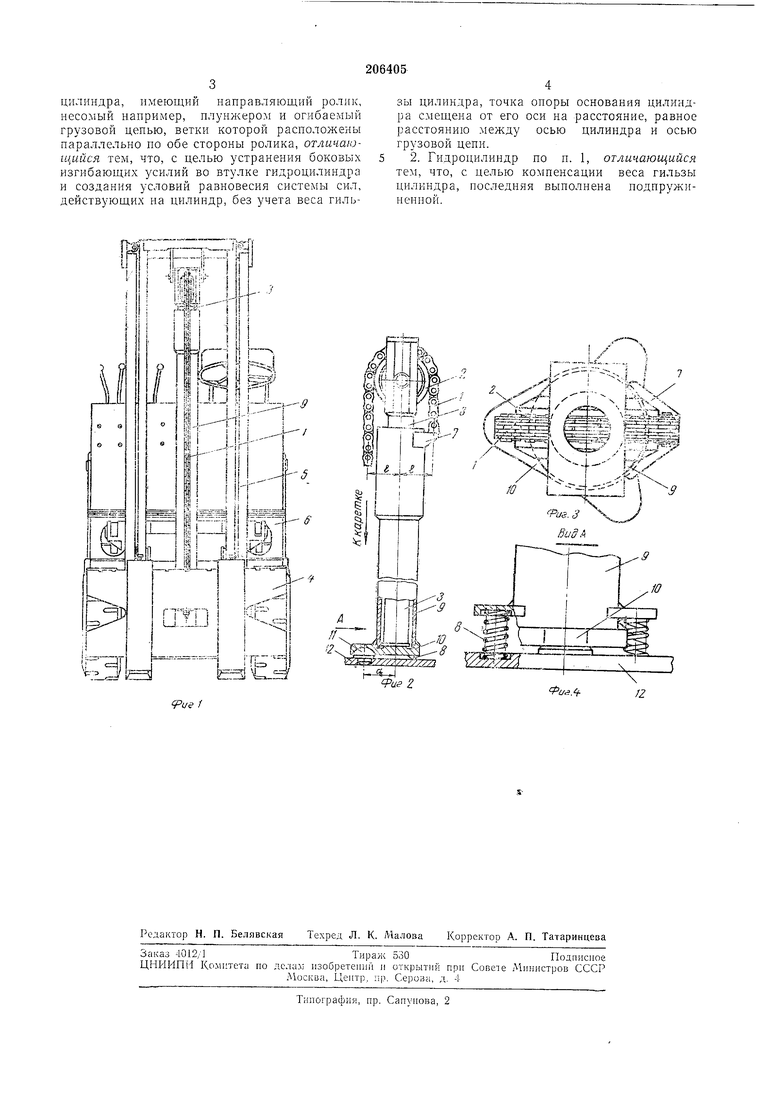
На фиг. 1 изображен погрузчик с гидроцилиндром, вид спереди; на фиг. 2 - гидроцилиндр, вид сбоку; на фиг. 3 - то же, вид сверху; на фиг. 4 - вид по стрелке А на фиг. 2 (нижняя часть цилиндра с компенсирующими пружинами).
Один конец грузовой цепи /, огибающий направляющий ролик 2, несомый плунжером 3 гидроцилиндра, крепится к каретке 4 грузоподъемника 5 погрузчика 6. Другой конец через кронщтейн 7 крепится к опирающейся на пружины 5 гильзе цилиндра 9, основание }0 которой через щаровой подпятник 11 укреплено на нижней полеречине 12 рамы грузоподъемника 5. Шаровой подпятник смещен от оси гидроцилиндра на расстояние а, равное
расстоянию / между осью цилиндра и осью грузовой цепи /. При выдвижении плупжера 3 гильза цилиндра 9 остается неподвижной. Грузовая цепь 1 перекатывается через наиравляющий ролик 2 и поднимает каретку 4. В точке крепления цепи за гильзу цнл11ндра i действует направленная вертикально вверх сила Р, равная весу каретки 4 с грузом. Ыа основание 10 гильзы цилиндра через плунжер
3 и рабочую жидкость действует сила, ианравленная вертикально вниз вдоль оси гидроцилнндра и вследствие полиспастности, образуемой грузовой цепью и направляющим роликом 2, равная 2Р. Рассматривая действие
этих сил относительно точки опоры щарового подпятника 11 и при , получаем, что Р()2Ра или Р(), т. е. данная система сил без учета веса гильзы цилиндра 9 находнтся в равновесии, а вес гильзы компенсируется иружинамн 8. Способ установки этих пружин может быть различным. Подбором усилия пружин 8 можно добиться наивыгоднейших условий работы гидроцплиндра нри наклонном назад грузоподъемнике 5.
цилиндра, имеющий иаправляющий ролик, несомый например, плунжером и огибаемый грузовой цепью, ветки которой расположены параллельно по обе стороны ролика, отличающийся тем, что, с целью устранения боковых изгибающих усилий во втулке гидроцилиндра и создания условий равновесия системы сил, действующих на цилиндр, без учета веса гильзы цилиндра, точка оноры основания цилиндра смещена от его оси на расстояние, равное расстоянию между осью цилиндра и осью грузовой цепи.
2. Гидроцилиндр по п. 1, отличающийся тем, что, с целью компенсации веса гильзы цилиндра, последняя выполнена подпружиненной.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГРУЗОПОДЪЕМНИК ПРОМЫШЛЕННОГО ПОГРУЗЧИКА | 1970 |
|
SU268256A1 |
| Грузоподъемник погрузчика | 1985 |
|
SU1296507A1 |
| ГРУЗОПОДЪЕМНИК ПРОМЫШЛЕННОГО ПОГРУЗЧИКА | 1970 |
|
SU268257A1 |
| ГРУЗОПОДЪЕМНИК ПОГРУЗЧИКА | 2005 |
|
RU2297383C2 |
| ГРУЗОПОДЪЕМНИК ПОГРУЗЧИКА (ВАРИАНТЫ) | 2011 |
|
RU2474530C2 |
| Погрузчик | 1975 |
|
SU652107A1 |
| ТЕЛЕСКОПИЧЕСКИЙ ГРУЗОПОДЪЕМНИК ПОГРУЗЧИКА | 1968 |
|
SU221565A1 |
| ГРУЗОПОДЪЕМНИК ПОГРУЗЧИКА | 2010 |
|
RU2442744C1 |
| МАЛОГАБАРИТНЫЙ ЭЛЕКТРОПОГРУЗЧИК | 2012 |
|
RU2539442C2 |
| Телескопический грузоподъемник погрузчика | 1975 |
|
SU543615A1 |