Известны устройства для шагово-имлульсной системы .позиционного программного управления координатными столами с фиксацией набранной координаты жесткими упорами.
Предлагаемое устройство позиционного программного управления повышает точность позиционирования и упрощает структуру системы управления.
Существенно новым в устройстве является реализация принципа нониуса измерительной парой гребенка - фиксаторы, причем шаг фиксаторов больше (меньше) шага упоров измерительной гребенки на величину задаваемой разрешающей способности этой измерительной лары.
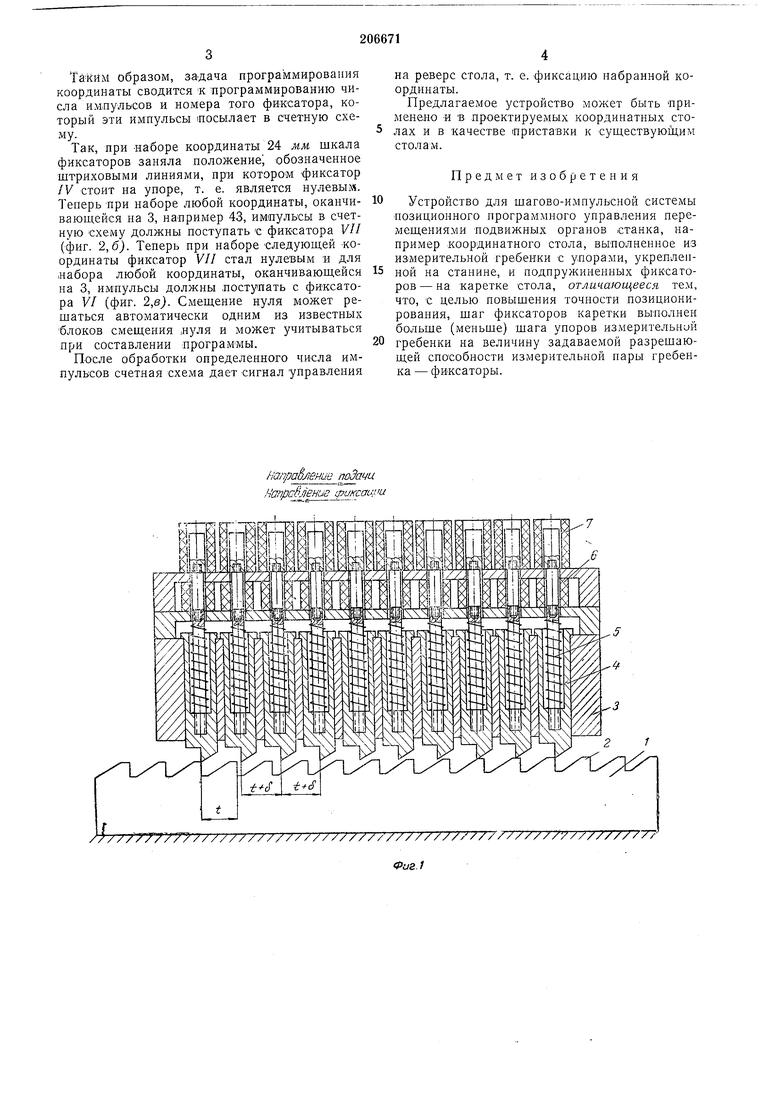
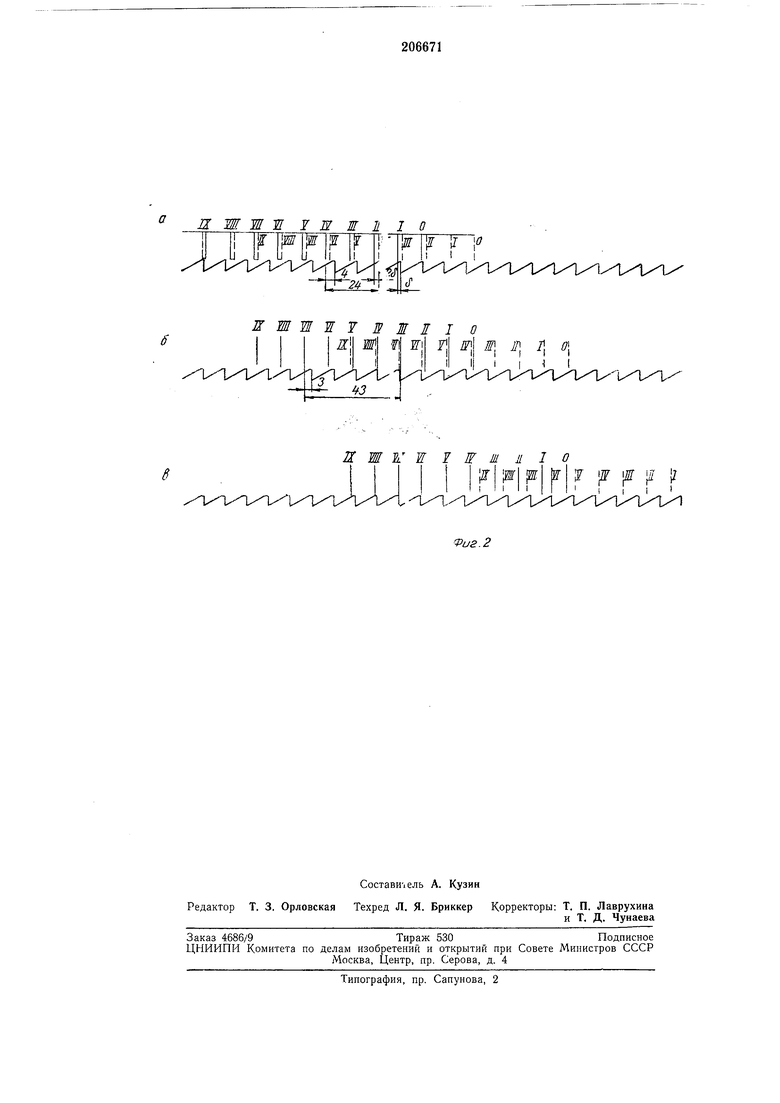
На фиг. I Представлена измерительная пара гребенка - фиксаторы; на фиг. 2-схема набора ;координат.
На станине станка крепится измерительная гребенка / с упорами 2 и точно выполненным шагом t.
На каретке стола (на чертеже не показана), перемещающегося на станине, монтируется блок фиксаторов 3, в котором расточены отверстия под подпружиненные фиксаторы 4 с шагом t + д, где б - разрешающая способность Предлагаемого устройства.
ки, приподнимаются, а при дальнейшем движении кареткИ опускаются под действием пружин 5. Прл реверсе каретки один из подпружиненных фиксаторов, упираясь в один из упоров измерительной гребенки, зафиксирует положение каретки.
Совершая колебательные двилсения при перемещении измерительной гребенки, фиксаторы посылают импульсы в установленные над
ними индукционные датчики 6. Число посылаемых импульсов равно числу шагов измерительной гребенки, пройденных измерительными фиксаторами. Подпружиненные фиксаторы 4, не участвующие в наборе координат, могут
выводиться из Контакта с измерительной гребенкой соленоидами 7,
Работу устройства можно пояснить следующим примером. При шаге измерительной гребенки 10 мм и щаге фиксаторов 11 мм разрешающая способность устройства 8 1 мм.
Когда фиксатор с индексом О (фиг. 2, а) стоит на упоре измерительной гребенки, кромка фиксатора / смещена от кромки упора на величину б, кромка фиксатора // - на величину 26, кромка фиксатора /// - на 3 б и т. д., следовательно, для отработки координаты 46 при нулевом фиксаторе, стоящем на упоре, на упор должен стать фиксатор IV, пройдя при этом расстояние 46 и став нулевым для набоТаким образом, задача программирования координаты сводится К программированию числа импульсов и номера того фиксатора, который эти импульсы посылает в счетную схему.
Так, при -наборе координаты 24 мм, шкала фиксаторов заняла положение; обозначенное штриховыми линиями, при котором -фиксатор /1/ стоит на упоре, т. е. является нулевыд5. Теперь при наборе любой координаты, оканчивающейся на 3, например 43, импульсы в счетную схему должны поступать с фиксатора У// (фиг. 2, б). Теперь при наборе следующей координаты фиксатор VII стал нулевым и для набора любой координаты, оканчиваюпдейся на 3, импульсы должны поступать с фиксатора У/ (фиг. 2,8). Смещение нуля может рещаться автоматически одним из известных блоков смещения нуля и может учитываться при составлении лрограм-мы.
После обработки определенного числа импульсов счетная схема дает сигнал управления
на реверс стола, т. е. фиксацию набранной координаты.
Предлагаемое устройство может быть применено -и в проектируе.мых координатных столах и в качестве приставки к cyщecтвyюii, столам.
Предмет изобретения
Устройство для шагово-импульсной системы позиционного программного управления перемещениями подвижных органов станка, например координатного стола, выполненное из измерительной гребенки с упорами, укрепленной на станине, и подпружиненных фиксаторов- на каретке стола, отличающееся тем, что, с целью повышения точности позиционирования, щаг фиксаторов каретки выполнен больше (меньше) шага упоров измерительной гребенки на величину задаваемой разрешающей способности измерительной пары гребенка - фиксаторы.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для клеймения | 1978 |
|
SU845946A1 |
| Устройство для сборки герметичного реле | 1984 |
|
SU1229854A1 |
| Счетная машина | 1934 |
|
SU49498A1 |
| Печатающий аппарат, например, к автоматической машине для измерения площади и толщины кож | 1961 |
|
SU151042A1 |
| Установка для сборки резинотехнических изделий | 1984 |
|
SU1148797A2 |
| Система программного управления станком | 1978 |
|
SU867531A1 |
| Устройство для укладки ампул в кассету | 1981 |
|
SU962110A1 |
| Линия для сборки под сварку и сварки плоских каркасов из продольных и поперечных стержней | 1981 |
|
SU979060A1 |
| УСТРОЙСТВО для ПРОГРАММИРОВАНИЯ КООРДИНАТ | 1967 |
|
SU204097A1 |
| Устройство для определения геометрических погрешностей траектории движения стола фрезерных станков с ЧПУ | 2016 |
|
RU2641939C2 |
Шпраёмени-з поЗти Hanpat,JeHus гриксти« П W Ж Ж Y N Ж Л I О гтг
л т
W ж 7 Ж й- |г;Г I 1
ж Е I о
5 71, 0 | I
fe IF |Ж |Ж 2
/г W ш
ийif/|f лЦ.
I i I I I
