Известны способы определения передаточной функции динамического звена или систе 1ы путем лодачи пробного единичного сигнала на вход системы с последующим определением коэффициентов полиномов передаточной функции. Предложенный снособ отличается от известных тем, что подают на вход динамического звена последовательность время - степенных пробных сигналов р,азличных масштабов и одновременно сравнивают пробный сигнал и сигнал с выхода динамического звена, изменяют масштаб сигналов и поддерживают нулевое значение разностного сигнала, а но значениям масштабов составляющих сигналов судят о значениях коэффициентов полиномов числителя и знаменателя передаточной функции. Это позволяет определять передаточные функции систем или звеньев произвольного порядка и имеет достаточно простую схемную реализацию. Способ заключается в следующем. Предположим, имеется устройство, вырабатывающее сигнал вида /(p) fo(p)«o + - + +...+ Сигнал 1(р) подается на вход исследуемой реальной системы, передаточную функцию которой надо определить. Выходной сигнал с системы подается на элемент сравнения, куда поступает и сигнал х(р), где х,(р) - изображение пробного сигнала. Если с устройства выработки КР) и х(р) последовательно подавать сигналы вида /о (р) Ч; fо (Р) хо+-у- « () + 7 7 на исследуемую систему и сигналы вида fо.(р) Ро; fо (р} ° + 0 (-) « + -7 + на элемент сравнения, то, последовательно задавая регулируемые .коэффициенты ао, oci, ао, ..., а и изменяя коэффициенты Ро, Pi, Ра, ..., р„гТак, чтобы на элементе сравнения для каждого вида входного и опорного сигнала получать нуль, то с регуляторов коэффициентов аир будем последовательно получать значения коэффициентов передаточной функции а и 6.
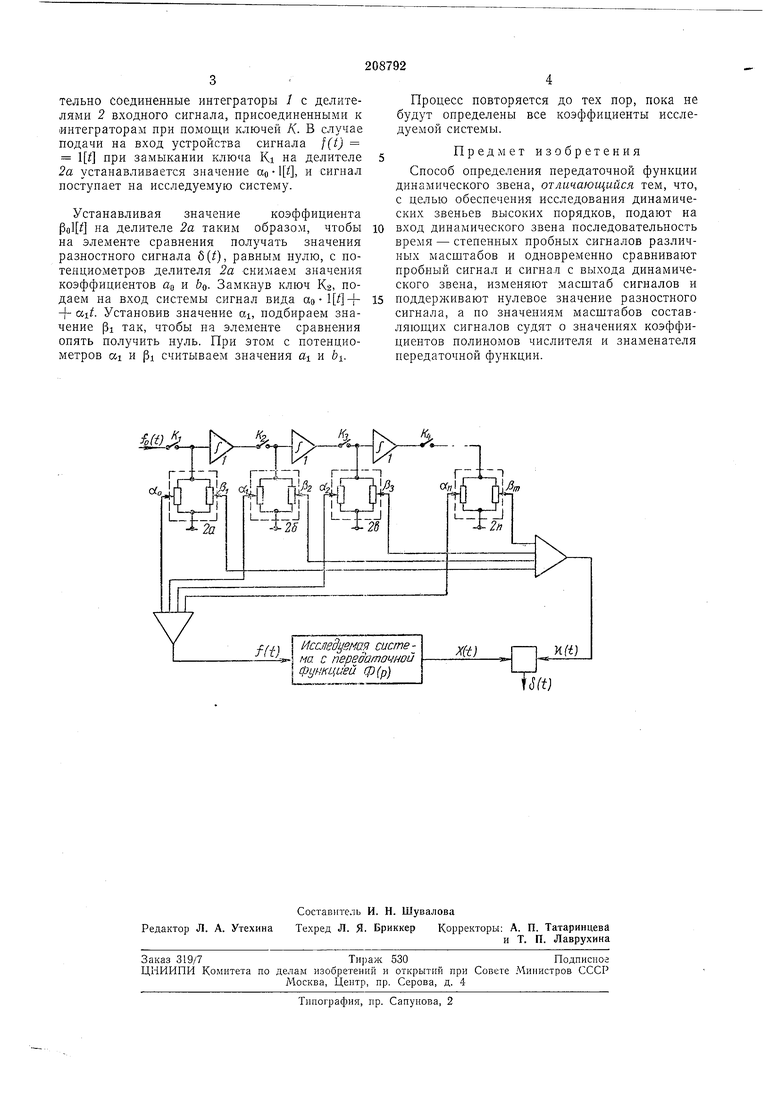
тельно соединенные интеграторы / с делителями 2 входного сигнала, присоединенными к интеграторам при помощи ключей Л . В случае подачи на вход устройства сигнала f(t) 1 при замыкании ключа Ki на делителе 2а устанавливается значение ао i, и сигнал поступает на исследуемую систему.
Устанавливая значение коэффициента Ро1 на делителе 2а таким образом, чтобы на элементе сравнения получать значения разностного сигнала 8(t), равным нулю, с потенциометров делителя 2а снимаем значения коэффициентов «о и &о- Замкнув ключ К2, подаем на вход системы сигнал вида ao-lM-f+ a,it. Установив значение аь подбираем значение PI так, чтобы на элементе сравнения опять получить пуль. При этом с потенциометров «1 и PI считываем значения а и Ь.
Процесс повторяется до тех пор, пока не будут определены все коэффициенты исследуемой системы.
Предмет изобретения
Способ определения передаточной функции динамического звена, отличающийся тем, что, с целью обеспечения исследования динамических звеньев высоких порядков, нодают на
вход динамического звена последовательность время - степенных пробных сигналов различных масштабов и одновременно сравнивают пробный сигнал и сигнал с выхода динамического звена, изменяют масштаб сигналов и
поддерживают нулевое значение разностного сигнала, а по значениям масштабов составляюш,их сигналов судят о значениях коэффициентов полиномов числителя и знаменателя передаточной функции.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ КОЭФФИЦИЕНТОВ ПЕРЕДАТОЧНЫХ ФУНКЦИЙ ЛИНЕЙНЫХ ДИНАМИЧЕСКИХ ОБЪЕКТОВ И ЗАДАТЧИК ПРОБНЫХ СИГНАЛОВ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2131139C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОЭФФИЦИЕНТОВ ПЕРЕДАТОЧНЫХ ФУНКЦИЙ ЛИНЕЙНЫХ ДИНАМИЧЕСКИХ ОБЪЕКТОВ | 1999 |
|
RU2166789C2 |
| СПОСОБ ИДЕНТИФИКАЦИИ ЛИНЕЙНОГО ОБЪЕКТА | 1995 |
|
RU2097818C1 |
| Устройство для определения параметров передаточной функции линейного динамического объекта | 1988 |
|
SU1585782A1 |
| Устройство управления многоприводной подъемно-транспортной установкой с гибким тяговым органом | 1986 |
|
SU1425141A1 |
| СПОСОБ АДАПТИВНОЙ КОМПЕНСАЦИИ ВЛИЯНИЯ ГАРМОНИЧЕСКИХ КОЛЕБАНИЙ МОМЕНТА НАГРУЗКИ В ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2565490C1 |
| Устройство для определения параметров динамического звена второго порядка | 1984 |
|
SU1231489A1 |
| СПОСОБ ИДЕНТИФИКАЦИИ ЛИНЕЙНОГО ОБЪЕКТА | 1999 |
|
RU2146063C1 |
| Способ идентификации линейной динамической системы | 2018 |
|
RU2675281C1 |
| Система автоматического управления | 1984 |
|
SU1168897A1 |
j:// j Иссиедуймая систе- ма с nsffsaamovHOU
Функцией ф(р)
/V«
Ш
