Предлагаемое изобретение относится к системам управления механизмами и замкнутым технологическим циклом, например гидропрессами-автоматами.
Известен гидравлический командоаппарат,, содержащий многозолотниковый распределитель, связанный с кулачковым валом, вращаемым храповым устройством от привода.
Для фиксирования угловых позиций вала в предлагаемом гидравлическом командоаппарате соосно с кулачковым валом установлен блок, состоящий из неподвижного диска с бесконтактными датчиками, электрически связанными со стальной пластинкой, укрепленной на кулачковом валу.
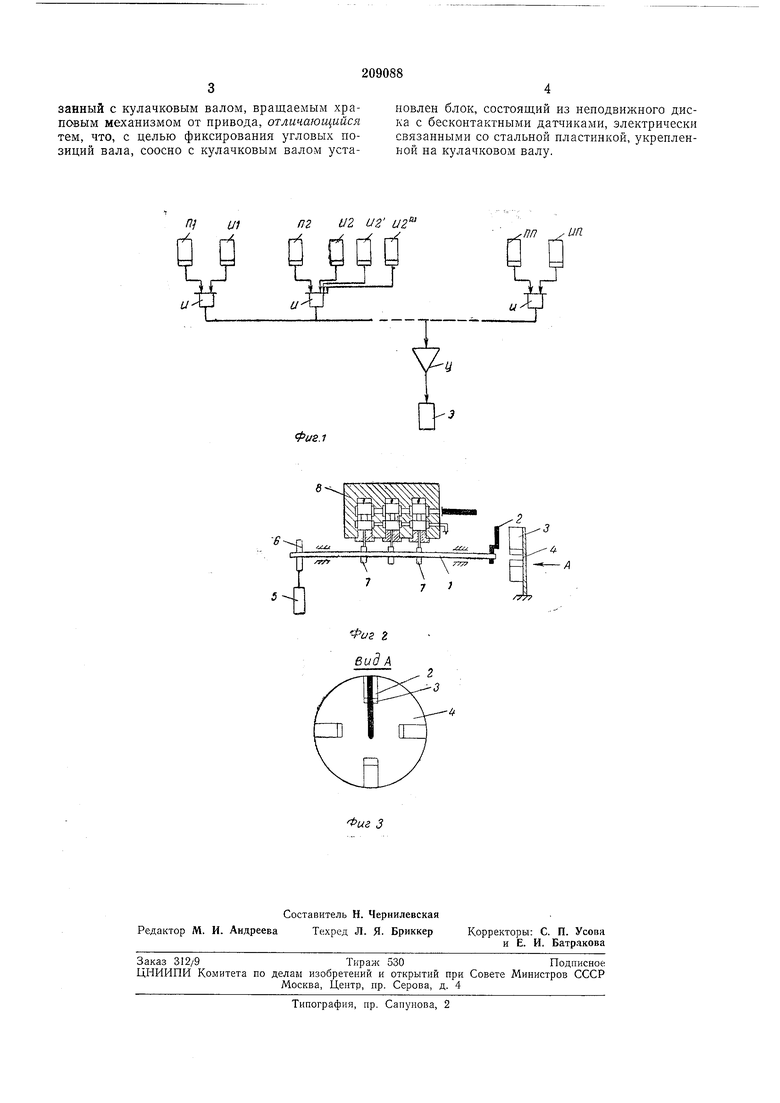
На фиг. 1 изобрал- ена электрическая схема предлагаемого командоаппарата; на фиг. 2 - конструкция его; на фиг. 3 - вид А фиг. 2.
Электрическая схема гидравлического командоаппарата выполнена на бесконтактных логических элементах.
В нее входят путевые датчики П1, П2, ПП, контролирующие позиции технологического цикла пресса и расположенные на оси гидрораспределителя; путевые (или другие) датчики И1, И2, ИП, контролирующие исполнение позиций технологического цикла пресса; выходной усилитель У и электромагнит-привод Э гидрораспределителя.
Перевод гидрораспределителя в последующую позицию и тем самым совершение определенной позиции технологического цикла осуществляется при наличии двух сигналов: первого сигнала от элемента П1, П2 и т. д. контролирующего совершаемую позицию технологического цикла, и второго сигнала от элемента И1, И2 и т. д., контролирующего окончание предыдущей позиции технологического цикла пресса. Необходимые блокировки выполняются простым суммированием сигналов на элементе Я.
Командоаппарат работает следующим образом.
При каждом повороте кулачкового вала 1 поворачивается закрепленная на его сои металлическая планка 2, которая устанавливается над бесконтактным путевым датчиком 3, смонтированным на неподвижном диске 4.
При этом на выходе бесконтактного путевого выключателя появляется электрическое напряжение, используемое в дальнейшем в схеме управления электромагнитом 5, который посредством храпового механизма 6 и кулачков
7 включает в работу соответствующие золотники гидравлического распределителя 8.
занный с кулачковым валом, вращаемым храповым механизмом от привода, отличающийся тем, что, с целью фиксирования угловых позиций вала, соосно с кулачковым валом установлен блок, состоящий из неподвижного диска с бесконтактными датчиками, электрически связанными со стальной пластинкой, укрепленной на кулачковом валу.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ ГИДРАВЛИЧЕСКИМ ПРЕССОМ | 1971 |
|
SU302256A1 |
| СИСТЕМА УПРАВЛЕНИЯ ГИДРАВЛИЧЕСКИМ ПРЕССОМ | 1971 |
|
SU317551A1 |
| СИСТЕМА УПРАВЛЕНИЯ ГИДРАВЛИЧЕСКИМ ПРЕССОМ | 1969 |
|
SU251366A1 |
| УСТАНОВКА ДЛЯ АВТОМАТИЧЕСКОЙ МОЙКИ ИЗДЕЛИЙ | 1992 |
|
RU2008988C1 |
| Гидравлический командоаппарат | 1974 |
|
SU561014A1 |
| ГИДРАВЛИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ МНОГОПОЗИЦИОННЫМ ПРЕССОМ ДЛЯ ПРЕССОВАНИЯ ПОРОШКОВЫХ МАТЕРИАЛОВ | 2005 |
|
RU2294284C1 |
| Гидроакустическая станция подводной лодки с гибкой протяженной буксируемой антенной | 2021 |
|
RU2776960C1 |
| Электрогидравлический следящий привод | 1977 |
|
SU920267A1 |
| Гидравлический командоаппарат | 1961 |
|
SU151519A1 |
| УСТРОЙСТВО ДЛЯ МЕХАНИЧЕСКОЙ ПОДАЧИ ГВОЗДЕЙ В МАШИНЫ ДЛЯ ПРИБИВАНИЯ КАБЛУКОВ ИЗНУТРИ | 1937 |
|
SU60708A1 |
/2 иг
Фиг.1
