(54) гаДРАВЛИЧЕСКИЙ КОМАНДОАППАРАТ
| название | год | авторы | номер документа |
|---|---|---|---|
| Программное устройство | 1981 |
|
SU951277A1 |
| Устройство для наплавки | 1972 |
|
SU473578A1 |
| Подъемное устройство | 1986 |
|
SU1331824A1 |
| Протаскивающее устройство сучкорезной машины | 1978 |
|
SU729051A1 |
| СИСТЕМА УПРАВЛЕНИЯ ГИДРАВЛИЧЕСКИМ ПРЕССОМ | 1969 |
|
SU251366A1 |
| СИСТЕМА УПРАВЛЕНИЯ ГИДРАВЛИЧЕСКИМ ПРЕССОМ | 1973 |
|
SU397370A1 |
| Автомат для навивки пружин | 1980 |
|
SU895576A1 |
| Командоаппарат | 1984 |
|
SU1399832A1 |
| КОМБИНИРОВАННЫЙ ГИДРОМЕХАНИЧЕСКИЙ ПРИВОД ПЕРЕКЛЮЧЕНИЯ ДИАПАЗОНОВ ПЛАНЕТАРНОЙ СОГЛАСУЮЩЕЙ КОРОБКИ ПЕРЕДАЧ | 2014 |
|
RU2554732C1 |
| Командоаппарат | 1984 |
|
SU1399833A1 |
1
Изобретение относится к гидравлическим командоаппаратам, используемым в системах управления силовыми цилиндрами различных машин и механизмов.
Известен командоаппарат, содержащий гидравлический цилиндр, распределитель, связанный с кулачковым валом, приводимым во вращение через храповый механизм от гидравлического цилиндра управления, сообщенного с распределителем управления и взаимодействующим с путевыми золотниковыми распределителями ll .
Недостатки известного устройства заключаются в значительных трудностях при переналадке командоаппарата, связанных с заменой профилирующих кулачков для заданного цикла работы; невозможности осуществления паузы в рабочем цикле, необходимой в отдельных устройствах, например, в литейных машинах при кристаляйзйдий отливок.
Целью изобретения явЛяетсй расширение функциональных возможностей командоаппарата путем обеспечения автоматической работы группы гидравлических цилиндров
в заданной; последовательности- я возможности изменения последовательности их работы.
, Для этого гидравлический цилиндр унравления снабжен дополнительными распределителями управления, включенными с ним последовательно и. взаимодействующими со штоками : гидравлических цилиндров, а шток цилиндра управления снабжен шарнирным
многозвенником для попеременного взаимодействия его звеньев с jраспределителями правления.
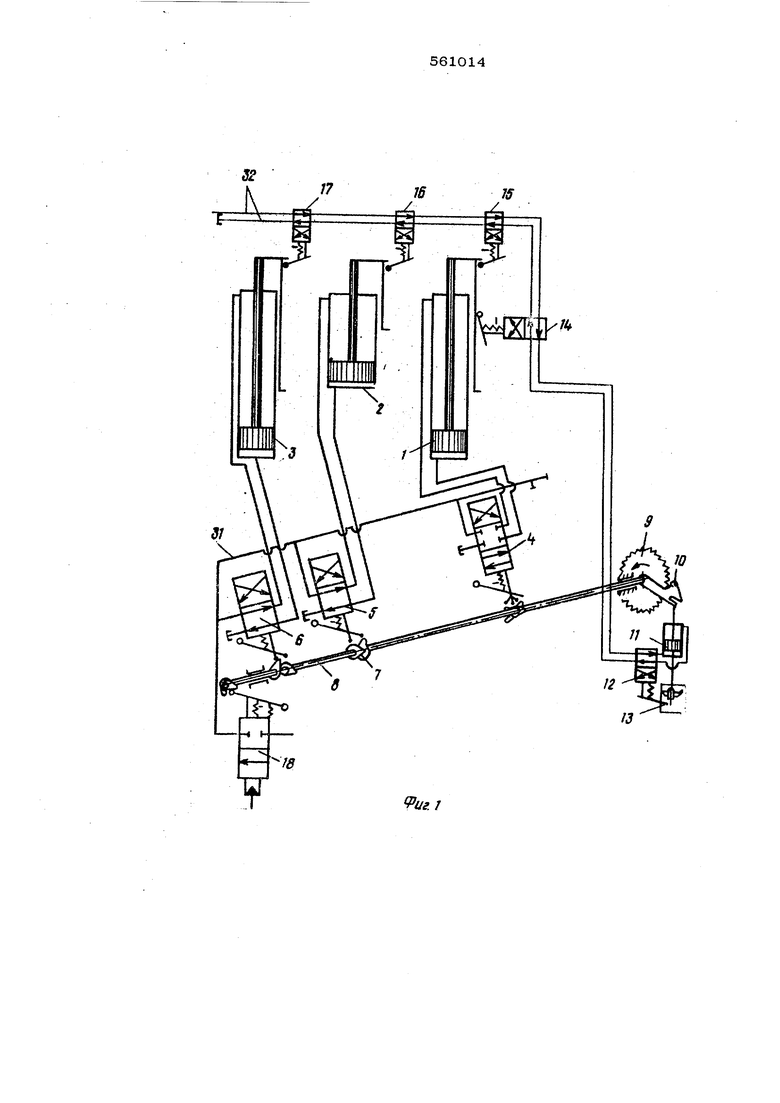
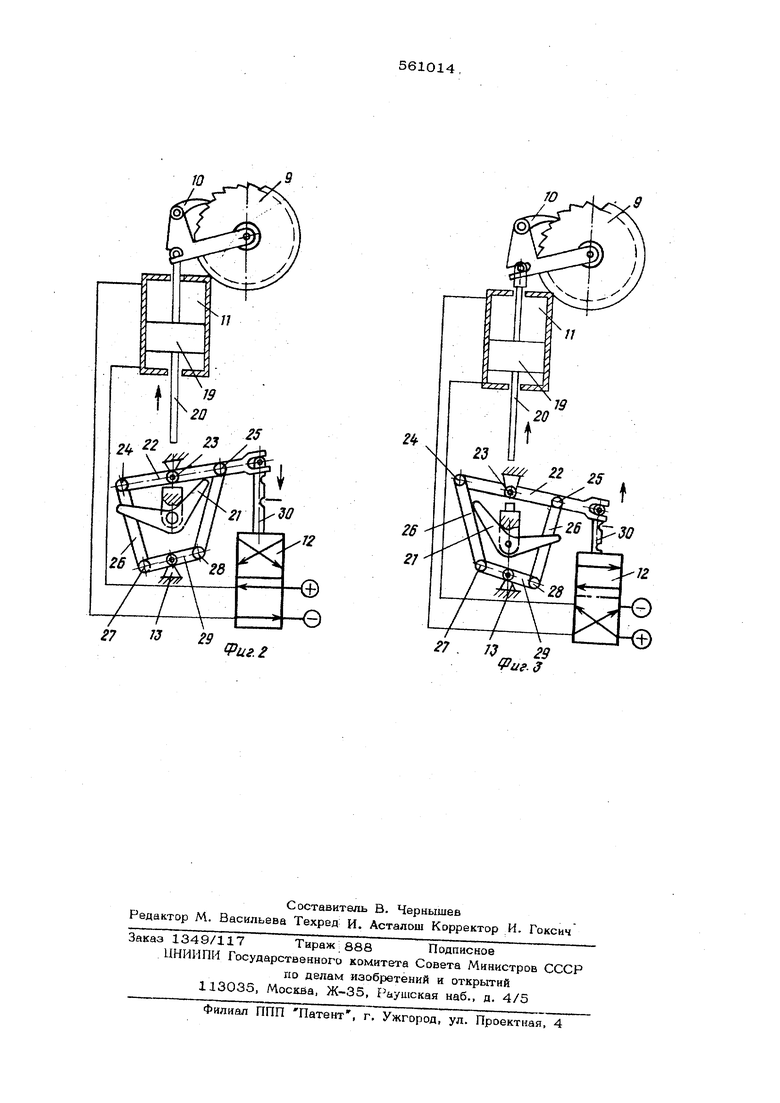
На фиг. 1 схематически изображен предлагаемый комакдоаппарат; на фиг. 2 - узел
переключающего распределителя при верхнем положении многозвенника; на фиг. 3 то же, при ннжнем положении многозвенника.
Управление гидравлическими цилиндрамй 1-3 рабочих органов машины осуществляется с помощью распределителей 4-6 взаимодействующих с кулачками 7 кулачкового вала 8, снабженного храповым .механизмом в виде храпового колеса 9 и
собачки 10. Колесо 9 связано с мшлиндром управления 11 распределителя управления 12, переключаемого шарнирным мно- гозвенником 13, Дополнительные распределители управления 14-17 последовлтельно соединены с распределителем 12. Гидравлический цилиндр 1 управляется трехлозиционным распределителем 4, а гидравлические цилиндры 2 и 3 соответственно двухпозиционными распределителями 5 н 6. Распределитель 18 осушествляет пуск командоаппарата и паузы в рабочем цикле. Поршень 19 со штоком 20 цилиндра управления 11 снабжен двухплечим рычагом 21, взаимодействующим с верхним звеном 22 шарнирного многозвенника 13. Ось 23 шарнирного многозвенника 13 неподвижна а оси 24 и 25 подвижны и соединены тягами 26 с осями 27 и 28 ндакнего.звена 29. Верхнее звено 22 взаимодействует с плунжером 30 распределителя 12. Командоаппарат имеет силовую магистраль 31 и магистраль управления 32. Предложенное устройство работает следующим образом. В наладочном режиме: включением любого из распределителей 4-6 подают рабочее тело в требуемые полсюти соответствующих гидравлических цилиндров 1-3, вызьшая тем самым перемещение их штоков на рабочий ход. При переключении распределителей 4-6 осуществляет ;я возврат в исходное положейие штоков цилиндров 1-3. В автоматическом режиме включается распределитель 18 (команда на этот распре делитель подается автоматически перед каж дым новым циклом), рабочее тело поступае в силовуп магистраль 31 и проходит через тот из распределителей 4-6, шток которого вьшвинут, и псютупает в соответствующий гидравлический цилиндр 1, 2 или 3, осуществляя рабочий хог его штока. В конце хода шток цилиндра перемещает плунжер соответствующего распределителя управлення 14-17, каждый из которых меняет направление потока рабочего тела в магист рали управления 32. Измененный поч ок рабочего тела через распределитель управления 12 проходит в цилиндр 11, шток 20 ксугорого с помощью собачки 1О осуществляет поворот храпового колеса 9 на заданный угол. Поворачиваемый храповыМ колесом кулачковый вал 8, с помощью кулачков 7, установленных в положениях, определяемых з; данной циклограммой работы командоаппарата, осуществляет переключение того на распроделителой 4-6, который должен 50 55 60 управлять движением штока гидравлических цилиндров 1-3. В конце рабочего хода поршня 19 циллвдра 11 его шток 20, поднимаясь (фиг.2) одним из плечей двухплечего рычага 21 воздействует на ось 24 звена 22 многозвенника 13, поворачивая это звено вокруг неподвижной оси 23 и перемешая вниз плунжер 30 распределителя управления 12. Распределитель 12 меняет направление потока рабочего тела в магистрали 32, подавая его в противоположную полость цилиндра 11. При этом поршень 19 и шток 20 с шарнирно укрепленным на нем двухплечим рычагом 21 опускается. Когда рычаг 21 приходит в нижнее положение, он упирается в ось нижнего 29, и, поворачиваясь, занимает другое положение (фиг. 3). Штоки гидравлических цилиндров 1, 2, 3 в конце хода вниз с помощью упоров переключают соответствующие распределители .14-17. При этом вновь меняется направление потока рабочего тела в магистрали управления 32. Этот поток, проходя распределитель управления 12, перемещает шток цилиндра 11, который через собачку 1О вновь поворачивает на требуемый угол храповое колесо 9 с кулачковым валом 8. Кулачковый вал 8 через кулачки 7 вновь переключает один или несколько распределителей 4-6. После вьшолненкгя очередного цикла работы гидравлических цилиндров и переключения их штоками соответствующих распределителей 14-17, измененный этими распределителями поток рабочего тела по магистрали 32 поступает в цилчндр 11 поднимает шток 20 сГ двухплечим рычагом 21. В конце хода вверх (фиг. 3) плечо двухплечего рычага 21, нажимая на ось 25, поворачивает верхнее звено 22 вокруг оси 23 и вьщвигает плунжер ЗО распределителя управления 12, который вновь изменяет направление потока рабочего тела в магистрали 32. При этом поршень 19 со штоком 20 перемещается .вниз. В конце хода плечо двухплечего рычага 21 нажимает на ось 28 и возвращает рычаг 21 в начальное положение (фиг. 2). Таким обрал м, шарнирный многозвенник 13 обеспечивает перемещения плунжера 30 и переключения распределителя управления 12. Аналогично осуществляются последующие циклы работы командоаппара- та. В конце цикла один из кулачков 7 нажимает на шток распределителя 18, который прекращает подачу рабочего тела в силовую магистраль 31. Этот кулачок устанавливается так, чтобы нажатие на шток распределителя 18 осуществлялось в необходимый период цикла работы комавдоаппарата, вызывая при; этом паузу в цикле работы.
После заданного времени включается распределитель 18 (контроль времени осушествляется по реле времени.на чертеже не показан) и работа командоаппарата возобновляется.
Трехпозипионный распределитель 4 обес- печивает остановку штока гидравлического цилиндра 1 не только вкрайних, но и в промежуточных положениях.
Формула изобретения
6
золотниковыми распределителями, о т л ичаюшийся тем, что, с целью расширения функциональных возможностей путем обеспечения автоматической работы группы гидравлических цилиндров в заданной последовательности и возможности изменения последовательности их работы, гидравлический цилиндр, управления снабжен дополнительными распределителями управления, вклченными С- им {последовательно и взаимо- действуюц ||Ями со штоками гидравлических цилиндров.
Источники информации, принятые во внимание при экспертизе:
иг.1
