Манипуляторы, содержащие платформу, перемещающуюся по рельсовому пути от привода, снабженную направляющими для переамещения по ним приводной подъемной рамы с MexaHnsMjDM захвата, известны.
Предложенный манипулятор отличается от известного тем, что он снабжен грузоподъемной траверсой с механизмом захвата в виде упорных рычагов; соединенных гибкой связью с дополнительной поворотной траверсой, закрепленной на подъемной рамс, при этом оси упорных рычагов имеют возможность перемещения в горизонтальных направляюни1х грузоподъемной траверсы.
Привод подъемной рамы выполнен в виде полиспастов, подвижные блоки которых установлены на подъемной раме, а неподвижные- на ее направляющих. Такое выполнение манипулятора устраняет изгибающие моменты, действующие на манипулятор.
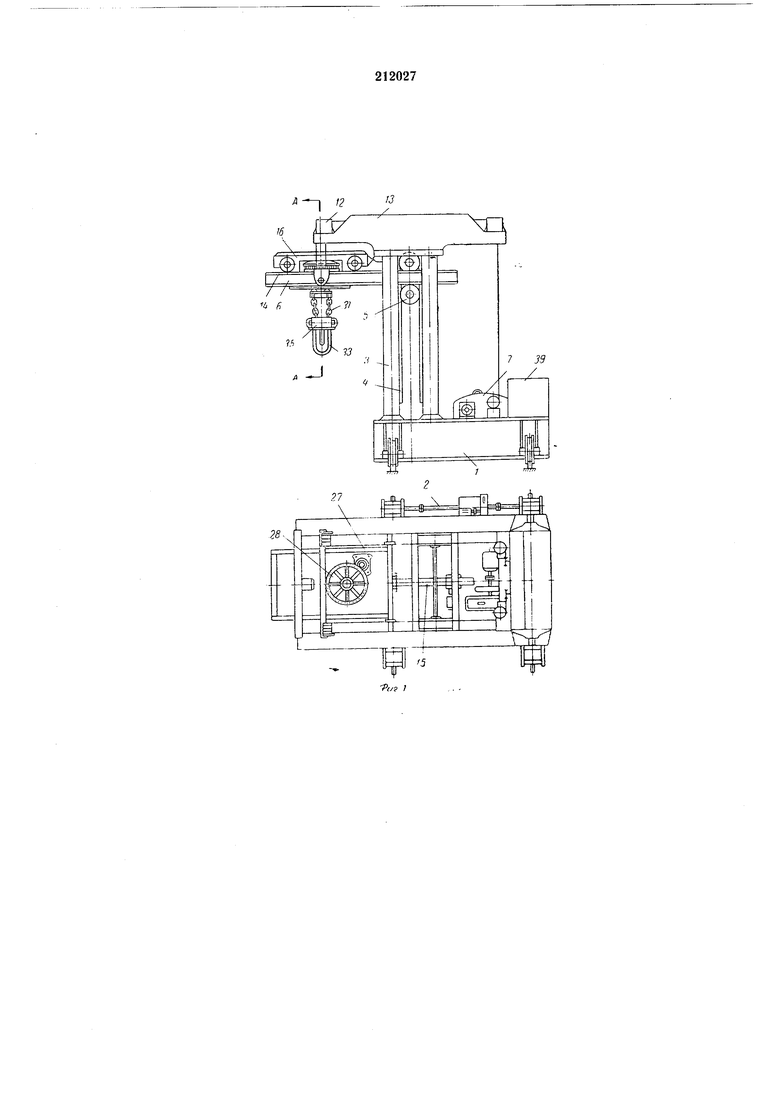
На фиг. изображен описываемый манипулятор в двух проекциях; на фиг. 2 - разрез А-А фиг. 1.
Платформа 1 перемещается но рельсовому пути с помощью механизма передвижения 2. На платформе установлены колонны 3 с закрепленными на них направляющими 4, по которым на катках 5 перемещается приводная подъемная рама 6.
Подъем и опускание рамы производится посредством механизма подъема 7 с помощью канатных полиспастов. Подвижные блоки : полиспастов установлены на осях 9 внутри балок оодъемной .рамы 6, а неподвижные блоки 10 установлены на осях 11, закрепленных на траверсе 12, опирающейся на балки 13, образующие с колоннами 3 станину манипулятора. На подъемной раме но рельсам 14 с помощью реечного механизма 15 перемещается на катках грузовая тележка 6, на которой расположен подщинниковый узел, состояи ий из втулки 17 и упорного подшипника 18. На валу 19 с помощью втулки 20 с цапфами 21 щарнирно закреплена дополнительная поворотная траверса 22. Роликами 23, враи1ающимися на осях 24, поворотная траверса поджимается гайкой 25 к опорному кругу 26, расположенному на грузовой тележке.
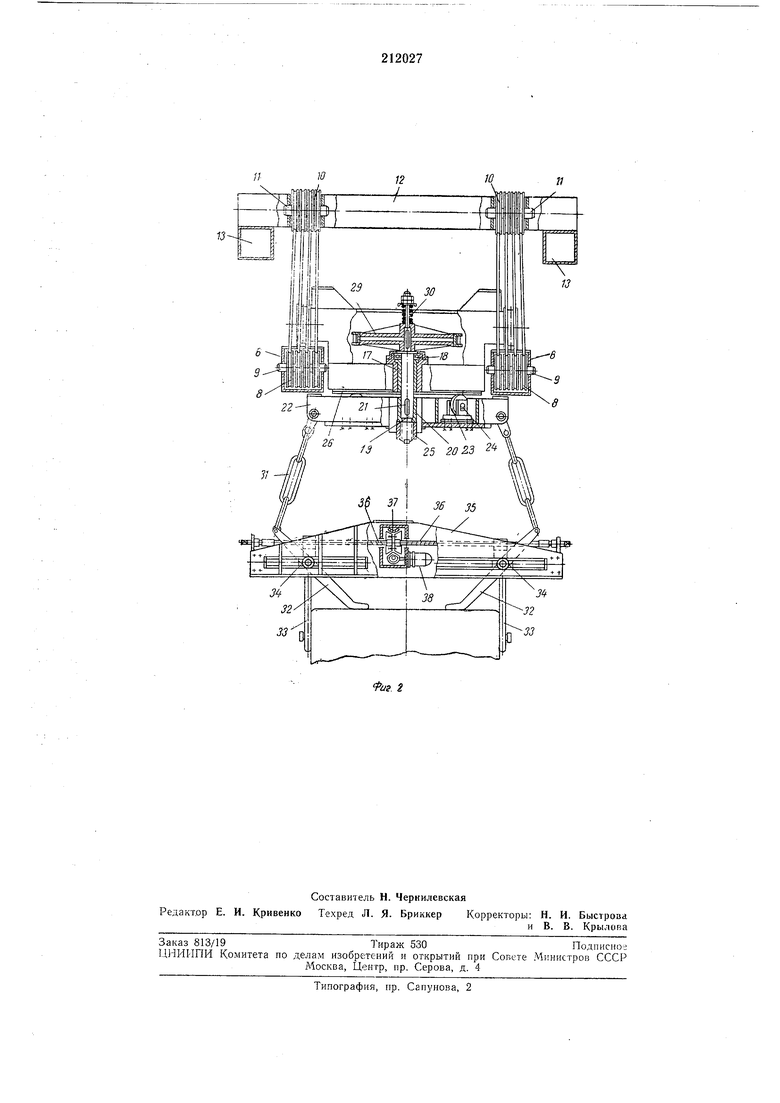
Поворот траверсы 22 вокруг вертикальной оси осуществляется валом 19 от привода 27 через цевочную передачу 28 и фрикнион 29, который регулируется затяжкой пружины 30.
Траверса 22 соединена цепями 3/ с упорными рычагами 32, на осях которых закреплены проущины 33, а оси упорных рычагов расположены в ползунах 34, имеющих возможность перемец ения в горизо11тал ;нол; направлении в прорезях грузоподъемной траверсы 35 с помощью винтов 36 через фрикцион 37 от привода 38.
Для обеспечения устойчивости манипулятор загружается балластом 39.
При разделке на прессе металлургических изложниц манипулятор работает следующим образом.
Приводом 38 рычаги 32 и проушины 33 разводятся в крайнее положение, соответствующее ширине наибольшей изложницы по ее цапфам.
Механизмами 7 к 15 грузовая тележка 16 устанавливается над изложницей, а грузолодъемная траверса 35 опускается на торцовую нлоскость изложницы. При этом упорные рЫчаги 32 поворачиваются на своих осях и входят во внутрь траверсы 35, Приводом 38 проушины 33 сводятся винтами 36 до соприкосновения со стенками изложницы, причем фрикцион 37 ограничивает их дальнейшее сближение.
При подъеме рамы 6 с грузовой тележкой 16, .поднимается траверса 22, при этом цепи 31 поворачивают рычаги 32, которые, упираясь в днище изложницы, поднимают траверсу 35 до упора Проушин 33 в цапфы изложницы. Таким образом осуществляется захват изложницы за цапфы.
Затем манипулятор с изложницей подается к прессу и устанавливает ее на одном и том же уровне для откалывания каждого куска. По окончанию разделки одной из стенок изложница приводом 27 поворачивается на 90°
и происходит разделка перпендикулярной стенки.
Фрикцион 29 допускает вращение грузоподъемной траверсы 35 с изложницей при ее разделке и тем самым предохраняет манипулятор от действия крутящих моментов.
Остальная часть изложницы опускается и укладывается манипулятором на стенд, после чего приводо.м 38 разводятся проушины 33, освобождая донную часть изложницы.
Манипулятор подготовлен к захвату следующей изложницы.
Предмет изобретения
1. Манипулятор, содержащий платформу, перемещающуюся по рельсовому пути от привода, снабженную направляющими для перемещения но ним приводной подъемной рамы с механизмом захвата, отличающийся тем.
что, с целью устранения изгибающих моментов, действующих на манипулятор, он снабжен грузоподъемной траверсой с механизмом захвата в виде упорных рычагов, соединенных гибкой связью с дополнительной поворотной
траверсой, закрепленной на подъемной раме, при этом оси упорных рычагов имеют возможность перемещения в горизонтальных направляющих грузоподъемной траверсы. 2. Манипулятор по п. 1, отличающийся тем,
что привод подъемной рамы выполнен в виде полиспастов, подвижные блоки которых установлены на подъемной раме, а неподви ные - на ее направляющих.
16
| название | год | авторы | номер документа |
|---|---|---|---|
| НО-ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ПЕРЕВОЗКИ ТЯЖЕЛОВЕСНЫХ ГРУЗОВ | 1969 |
|
SU232770A1 |
| Кран-манипулятор для монтажа зданий из сборного железобетона | 1984 |
|
SU1203011A1 |
| ПЕРЕДВИЖНОЙ ПОДЪЕМНИК | 1969 |
|
SU254040A1 |
| Склад для хранения затаренных грузов (его варианты) | 1984 |
|
SU1217729A1 |
| Устройство для установки в боксы автомобилей в многоэтажных автоматизированных гаражах | 1990 |
|
SU1825866A1 |
| ГРУЗОПОДЪЕМНЫЙ КРАН | 1968 |
|
SU206825A1 |
| Устройство для подъема и транспортировки грузов | 1977 |
|
SU676534A1 |
| СПОСОБ МОНТАЖА ПОРТАЛА БАШЕННОГО КРАНА | 2005 |
|
RU2297971C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ТЯЖЕЛОВЕСНЫХГРУЗОВ | 1970 |
|
SU260115A1 |
| Грузоподъемное устройство крана | 1986 |
|
SU1440858A1 |