22
kaisA
4 4 О СХ) ел 00
ФигЛ
Изобретение относится к подъемно- транспортному машиностроению и предназначено для укладки арматуры с определенным шагом в продольном и поперечных направлениях в наборную раму сварочной машины для сварки перекрестий тяжелых арматурных сеток.
Цель изобретения - повышение точности позиционирования груза при подъеме длинномерного груза.
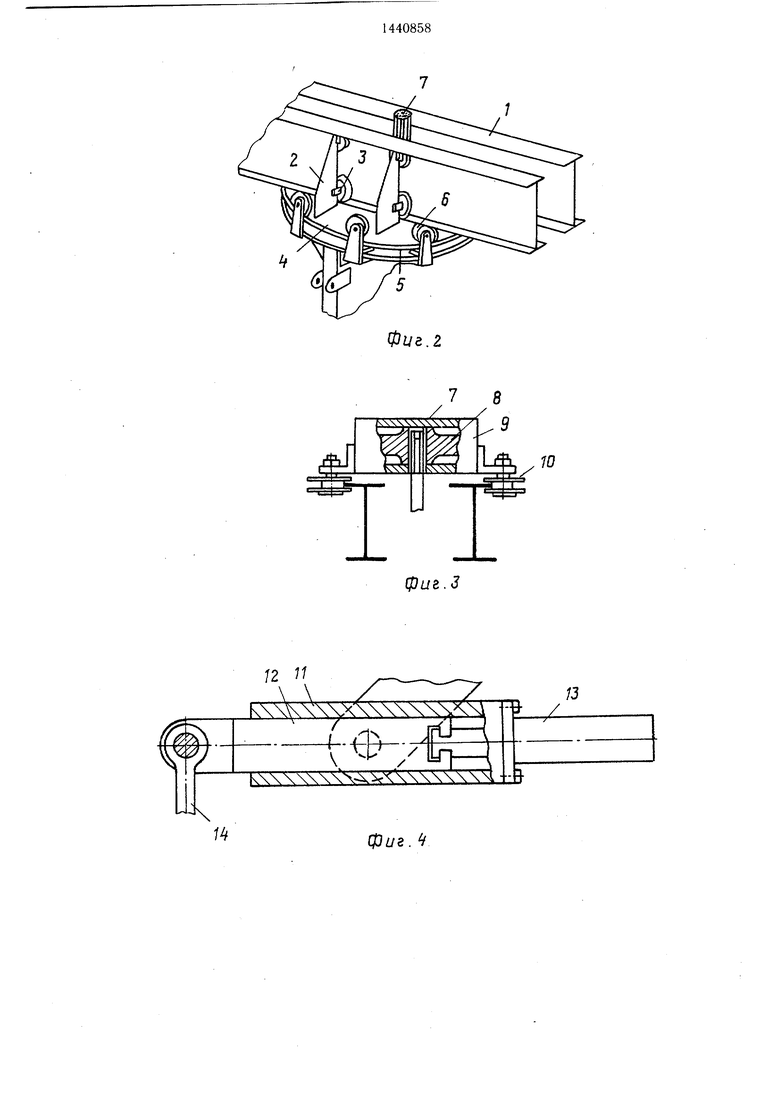
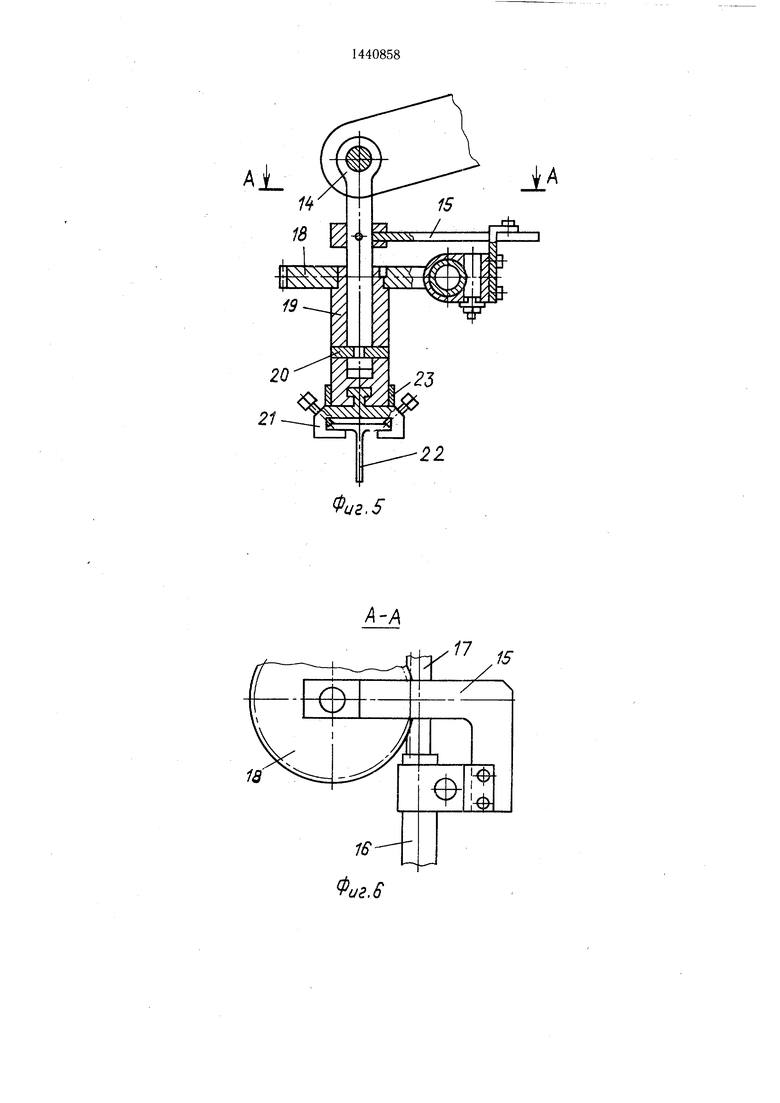
На фиг. 1 схематично представлен кран- манипулятор козлового типа, обш,ий вид; на фиг. 2- узел подвески круглой плиты к основанию грузовой тележки, перемещающейся по низу пролетной балки; на фиг. 3 - пролетная балка с насадным редуктором; на фиг. 4 - телескопическое конечное звено манипуляторной системы; на фиг. 5 - механизм вращения и подвески траверсы; на фиг. 6 - разрез А-А на фиг. 5; на фиг. 7 - устройство автоматического удержания и сброса стержней арматуры.
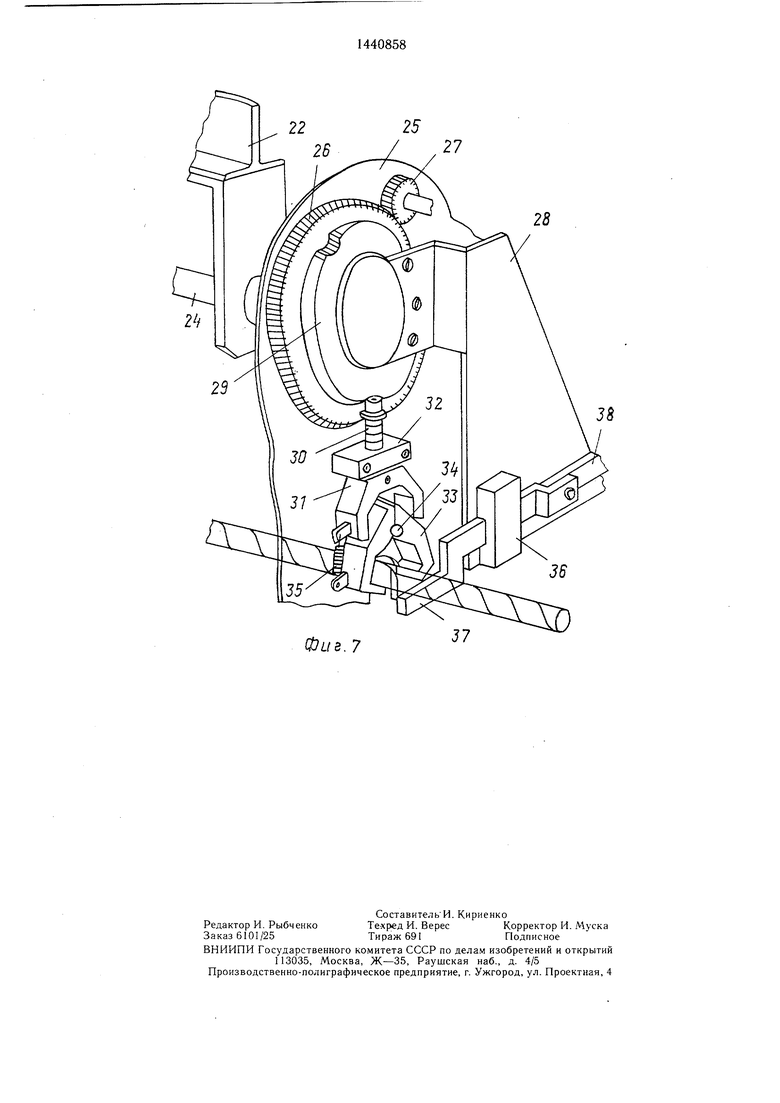
Пролетная балка I крана-манипулятора состоит из двух параллельно расположенных балок, к низу которых подвешена грузовая тележка 2, перемещающаяся вдоль пролетной балки с помощью роликов 3. К круглому основанию 4 в грузовой тележке 2 подвешена круглая плита 5 с помощью катков б, благодаря которым плита 5 совершает круговые движения вокруг общего с грузовой тележкой 2 вала 7, входящего шлицевым концом в червячную шестерню 8 насадного редуктора 9 на поддерживающих роликах 10. Конечное звено 11 манипуляторной системы имеет телескопическую вставку 12, связанную с гидроцилиндром 13 Т-образным соединением. С концом вставки 12 щарнирно соединен стержень 14 с неподвижно закрепленным на нем кронштейном 15 гидроцилиндра 16 поворота, который с помощью рейки 17 взаимодействует с шестерней 18, жестко скрепленной с корпусом 19, опирающимся на вставные кулачки 20. К корпусу 19, в свою очередь, Т-образным соединением с колодкой 21 подвещена траверса 22. Т-образное соединение фиксируется кольцом 23. На противоположных концах неподвижной оси 24 траверсы 22 установлены поворотные диски 25 с пазами по периферии диска. Поворотные диски 25 через шестерню 26 взаимодействуют с шестерней 27 червячного редуктора (не показан), который закреплен на кронштейне 28. Шестерня 26 и кулачок 29 с двумя пазами жестко закреплены на концах оси 24. Кулачок 29 посредством пружины 30 взаимодействует с подпружиненным коромыслом 31, которое направляется колодкой 32 и пальцевидным концом упирается в кулачок 29, а противоположным концом - в захват 33, свободно лежащий относительно пальца 34. Коромысло 31 и захват 33 соединены пружиной 35 растяжения. На кронштейне 28 установлена накладка 36, через
паз которой пропущен поддерживающий стержень 37, шарнирно соединенный с сердечником 38 втяжного электромагнита. Кран работает следующим образом.
Кран подают в зону загрузки. При вращении дисков 25 их загружают стержнями свариваемой арматуры, которые вкладывают в пазы диска 25. При дальнейшем скольжении пальца коромысла 31 с пружиной 30 по неподвижному кулачку 29 запирается захват 33. Загруженная стержнями траверса 22 откатывается в зону раскладки арматуры. С помощью грузовой тележки 2 и манипуляторной системы поворотной траверсы 22 арматурный стержень ориентируется
и подводится в заданную позицию сброса. Сброс происходит при очередном повороте диска 25, когда паз диска с арматурой находится в нижнем положении, совпадающем с вертикальной осью диска 25. В этом положении палец коромысла 3 попадает в углуб0 ление кулачка 29 под действием пружины 30. Захват 33 раскрывается, и арматурный стержень вываливается. Для более точной ориентировки арматурного стержня он удерживается стержнем 37. Только после этого вклю5 чается сердечник электромагнита 38, который, втягиваясь, тянет за собой стержень 37, и освобожденная арматура ложится в точно заданное место. Затем таким же образом в заданном месте сбрасывают остальные несколько арматурных стержней, которыми
0 загружен диск 25. После сброса последнего стержня кран-манипулятор снова подается под загрузку, и цикл работы повторяется.
Формула изобретен.ия
5 1- Грузоподъемное устройство крана, содержащее установленную на пролетной балке грузовую тележку, связанную с шар- нирно-рычажной системой, начальное звено которой соединено с грузовой тележкой с возможностью его вращения вокруг вертикальной оси, а конечное выполнено телескопическим и соединено с грузонесущим органом с захватом, отличающееся тем, что, с целью повышения точности позиционирования при подъеме длинномерного груза, гру5 зонесущий орган выполнен в виде траверсы и снабжен на каждом ее конце поворотными от привода диском, неподвижно закрепленными кулачком и кронштейном, приспособлением для удержания и сброса груза, включающим соединенное с захватом коромысло
0 для взаимодействия с кулачком.
2. Устройство по п. 1, отличающееся тем, что грузонесущий орган снабжен электромагнитом, включенным в цепь управления приводом поворота диска, и поддерживающим стержнем, а кронштейн выполнен с направляющей для указанного стержня, щарнирно соединенного с сердечником электромагнита.
0
5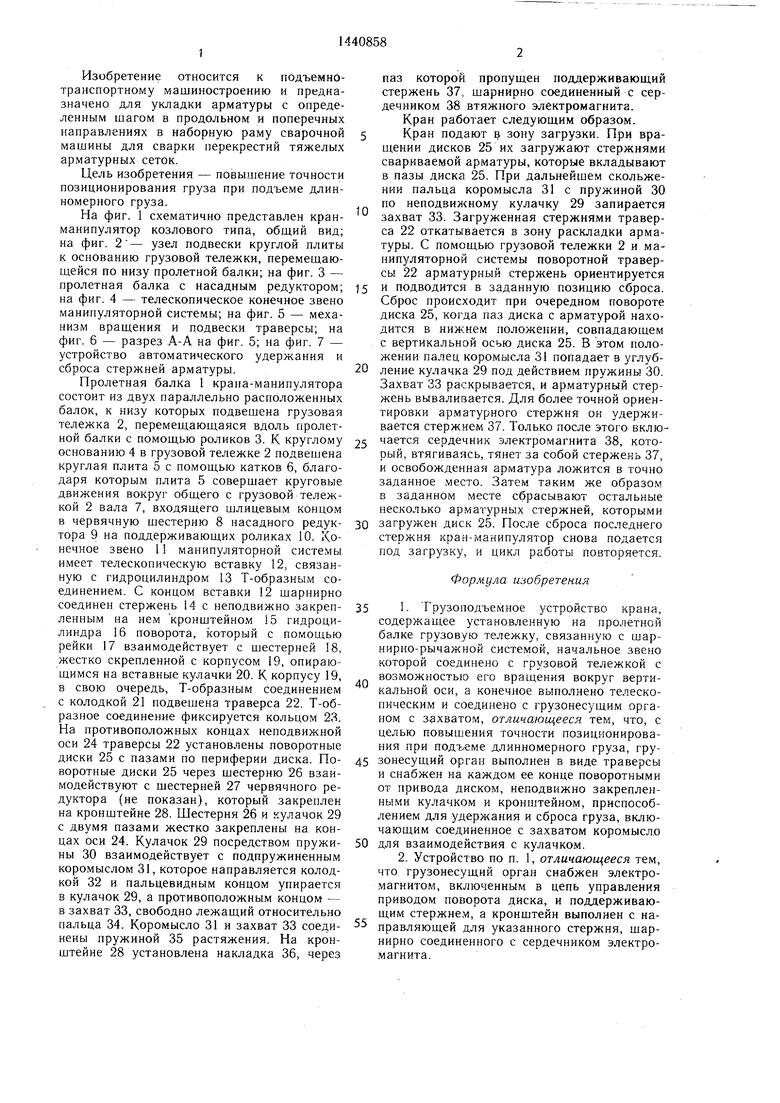
| название | год | авторы | номер документа |
|---|---|---|---|
| КРАН ДЛЯ ОБРАЩЕНИЯ С ОТРАБОТАВШИМ ЯДЕРНЫМ ТОПЛИВОМ В ЗАЩИТНОЙ КАМЕРЕ | 2007 |
|
RU2352516C1 |
| Консольный кран для монтажа блоков | 1987 |
|
SU1602852A1 |
| ПОДВЕСНОЙ КОНСОЛЬНО-КОЗЛОВОЙ КРАН | 1966 |
|
SU181794A1 |
| КРАН СТРЕЛОВОГО ТИПА | 2006 |
|
RU2305064C1 |
| Мостовой кран-перегружатель | 1984 |
|
SU1283211A1 |
| Консольный кран | 1982 |
|
SU1068376A1 |
| Консольный кран для монтажапРОлЕТНыХ СТРОЕНий MOCTOB | 1979 |
|
SU812700A1 |
| Кран для погрузки-разгрузки однотипных грузов | 1976 |
|
SU622393A3 |
| НАВЕСНАЯ ТРЕЛЕВОЧНАЯ ТЕЛЕЖКА | 2022 |
|
RU2785391C1 |
| Устройство для укладки цилиндрических изделий в контейнер | 1981 |
|
SU1027119A1 |
Изобретение относится к подъемно- транспортному машиностроению. Цель изобретения - повышение точности позиционирования груза. Грузоподъемное устройство крана содержит установленную на балке 1 грузовую тележку 2 с механизмом подъема груза, включающим грузонесущий орган, состоящий из траверсы 22, поворотных дисков, кулачка, кронштейна, подпружиненное коромысло, захват, соединенный с коромыслом, направляющую для поддерживающего стержня и электромагнит, сердечник которого шарнирно соединен с поддерживающим стержнем. Поворотные диски загружаются стержнями, и с помощью шарнирно-рычаж- ной системы стержни переносятся в заданную позицию сброса, где захват раскрывается, поддерживающий стержень освобождает связываемую арматуру, которая ложится точно в заданное место. 1 з. п. ф-лы, 7 ил.
Фиг.2
фиг.2
13
фиг.
Фиг. 5
ia
n
Фиг. 7
25
27
28
| Навесная перегрузочная машина | 1979 |
|
SU867857A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
