Настоящее изобретение относится к отрасли йодъемно-транопортиого машиностроения, а именно к .передвижным .подъемникам для обслуживания стеллажных складов.
Известны Передвижные подъемники, .представляющие собой триводную тележку, снабженную Подъемно-оиускиой платформой, несущей за.хватный орган. Последний выполнен в виде (ВИЛ или подвижного стола с приводом. Из.вестны также автоматические захватные ортаны, выполненные в виде установленного в корлусе толкателя, снабженного .нружиной и связанного с иоворотными захватными рычагами.
Такие подъемники не обеспечивают достигнутую точность доставки груза IB ячейки стеллажа.
Для возможности дистанционного управления кор.пус толкателя предлагаемого подъемника связан с -кареткой, .которая присоединена к приводному тяговому органу, смонтированному на подъемно-олускной платформе. На толкателе устано влена подвижная вдоль его оси коническая втулка, взаимодействующая с захватными рычагами. В момент расцепления чахватных рычагов с транспортируемым изделием втулка перемещается носредством дополнительной иружины, расположенной на толкателе.
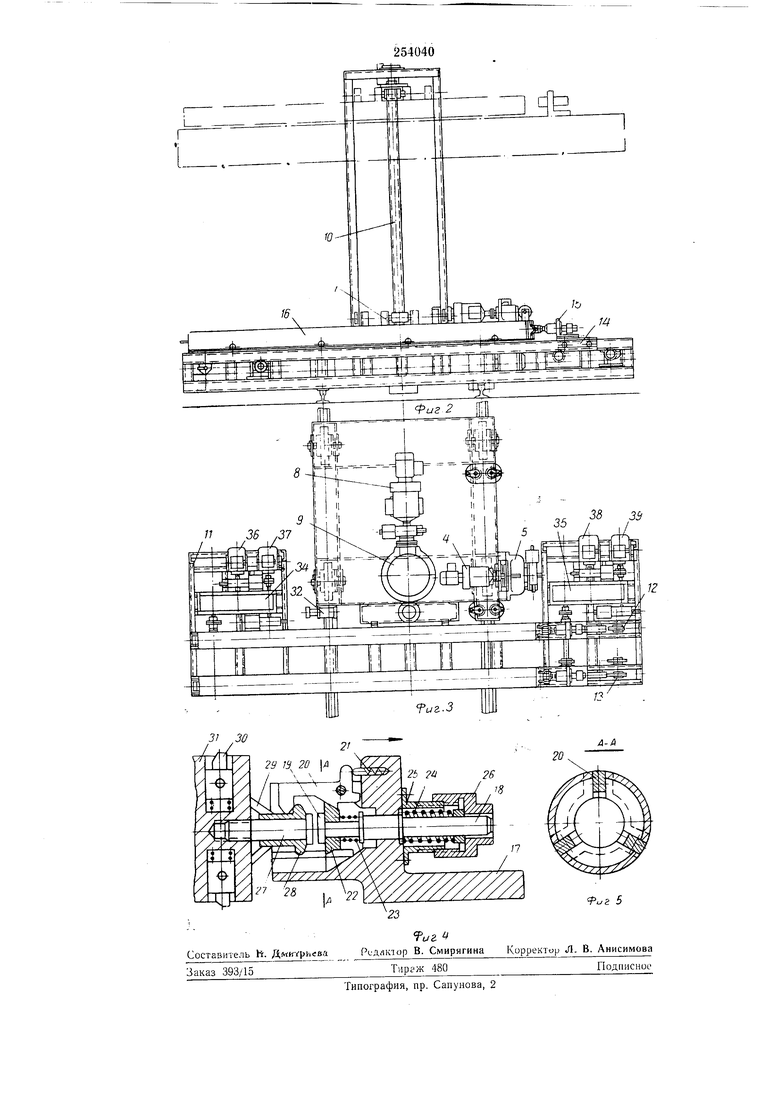
На фиг. 1 изображен предлагаемый подъелгник, видСбоку; на фиг. 2 - то же, вид спереди; на фиг. 3 - то же, вид сверху; на фиг. 4- захватный орган в .положении, соответствующем нз.влечению изделия из ячейки стеллажа; на фиг. 5 - разрез .по А-А на фиг. 4.
Нередвижной подъемник .представляет собой тележку /, перемещающуюся по рельсово му пути 2 на ходовых катках 3. Привод передвижения тележки состоит из электродвигателя 4 .и редуктора 5.
На тележке / установлеиа вертикальная рама 6, внутри которой перемещается на роликах грузонесущая каретка 7.
Перемещается каретка электродвигателем d редуктором 9 и винтом 10. Па каретке 7 консольно укреплена платформа 11, несущая на себе два цепных конвейера 12 и /5 с приводами. С цепью конвейе;ров связаны каретки 1-4
с установленными на них захвативши оргаиалги 15. На каретки 14 устанавливаются изделия 16. Конвейер 12 иредназначеи для заталкивания изделия в ячейку стеллажа, конвейер /3 - для извлечения изделия из ячейки.
Каждый захватный орган (см. фиг. 4) имеет корпус 17, в котором установлен толкатель /S с упорной шайбой 19 на конце. В корпусе // укреплены поворотные за.1ватиые рычаги 20, каждый из которых связан с подпружиненным На толкателе 18 установлена лодвижная коническая втулка 22, на которую воздействует пружина 23. Толкатель 18 н;рнл ;ат своим буртиком к корпусу 17 иружиной 24, затянутой с помощью стакана 25 и гайки 26 на усилие, необходимое для фиксации изделий в ячейках стеллажей. Транспортируемое изделие имеет рым 27, на котором смонтирована нодвижная втулка 2§ с унорной конической головкой на конце. Втулка 28 ujapHHpHO соединена с тягами 29, которые связаны с нодпружиненными защелками 30, установленяыми в кориусе 31, приКреиленном :К изделию 16. Для остановки подъемника у нужного вертикального ряда ячеек стеллажей и выбора необходимой ячейки нрименены системы наведения 32 и 33. Приводы ценных Конвейеров 12 и 13 содержат редукторы 34 и 55 со встроенной в них муфтой предельного момента. Редукторы приЕ;ОДЯТСЯ в движение односкоростными электродвигателями 36, 37, 38 и 39. Это позволяет иметь две скорости Иередвижения захватных ортанов 15: основную рабочую для перемещения изделия 16 вдоль |Платформы 11 н малую- установочную для моментов соединения нлн отсоединения захватных органов от изделий. Работает .подъемник следующим образом. Подъемник перемещается но рельсовому пути 2 носредством механнзма нередвижения, неся на платформе // изделие 16, соединенное с зах1ватным органом конвейера 12. С помощью системы наведения 32 нодъемник останавливаегся у нужного вертикального ряда ячеек стеллажей в таком положении,нри котором ось вертикального ряда совпадает с вертикальной осью ценного конвейера 13. Затем грузонесущая каретка 7 перемещается в вертикальном направлении ino винту 10 до тех пор, нока не сработает система наведевия 33, останавливаюн,ая нривод подъема, и изделие извлекается из ячейки стеллажа. Для этого аключается нривод цепного конвейера 13, который перемещает каретку 14 ,с захватным органом 15. Захватный орган, 1нриблнжаясь к изделию, наезжает захватными рычагами 20 на коническую поверхность головки втулки 28. Рычаги лереходят через головку втулки на ее цилиндрическую часть. При обратном ходе захватного органа рычагн 20 отводят втулку 28 от корпуса 31 и вытягивают через тяги 29 защел-ки 30 из гнезд стеллажа. После выхода защелок из гнезд втулка 28 унирается в унор рыма 27, и изделие 16 извлекается из стеллажа на платформу 11. Подъемник неремещается вдоль рельсового лути и останавливается так, чтобы вертикальная ось (Нустой ячейки стеллажа совпала с вертикальной осью конвейера 12. Для затал1КИ|Вания изделия в ячейку стеллажа включается лривод цепного конвейера 12. При этом каретка 14 леремещает захватный орган 15, тоЛКатель 18 которого, упираясь в торец рыма 27, заталкивает изделие до тех пор, лока защелки 30 не входят в гнезда стеллажа. После фиксации изделия в стеллаже корпус 17 лродолжает движение «перед, в то время ка« толкатель 18 остается неподвижным и унирается в торец рыма .27. Пружина 24 три этом сжимается, а захватные рычаги 20 скользят своими наклонными ловерхностями ino конической поверхности (Втулки 22 до заладания зубьев рычагов 20 за торец втулки 22. При этом рычаги 20 нрииоднимаются так, что внутренние скощенные поверхности на .их концах находятся на одном уровне с внутренней конической ловерхностью головки втулки 28. При обратном ходе корлуса 17 внутренние поверхности рычагов 20 скользят ло конической ловерхности головки втулки 28. Пружина 24 лрн этом разжимается, а втулка 22, увлекаемая зубьям1И рычагов 20, перемещается вдоль оси толкателя 18, преодолевая сопротивлеиие .пружины 23. При этом рычаги 20 приподнимаются все больше так, что при переходе их Через цилиНл1,рическую ловерхность головки втулки 28 зубья рычагов 20 освобождают втулку 22, которая сжатой иружиной 23 воз1вращается в исходное рабочее ноложение. При дальнейщем движении рычаги 20 сходят с головки втулки 28, за.хват отключается от изделия. Таким образом можно осуществлять дистанционное управление лредлагаемым лодъемником, а также точную установку изделия в стеллаже. Предмет изобретения Передвнжной подъемник для обслуживания стеллажного склада, содержащий тележку, на которой установлена вертикальная рама, снабженная неремещаемой вдоль нее лодъемно-апускной нлатформой, несущей захватный орган, выполненный в виде установленного в корлусе толкателя, снабженного пружиной и связанного с ловоротными за.хватными рычагами, отличающийся тем, что, с целью возможности дистанционного улравления подъемником, корлус толкателя связан с Кареткой, присоединенной к лриводному тяговому органу, смонтированному на подъемно-опускной платформе, лричем на толкателе установлена подвижная вдоль его оси колическая втулка, взаимодействующая с за.хватными рычагами, леремещаемая в момент расцепления захватных рычагов с транснортируемым изделием посредством дополнительной пружины, раслоложенной на толкателе.
Риг I
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ЗАГРУЗКИ И ВЫГРУЗКИ АВТОМОБИЛЯ В МНОГОЯРУСНОЙ МЕХАНИЗИРОВАННОЙ АВТОСТОЯНКЕ С ОППОЗИТНЫМ РАСПОЛОЖЕНИЕМ ЯЧЕЕК ХРАНЕНИЯ ОТНОСИТЕЛЬНО ШАХТЫ ПОДЪЕМНИКА И АВТОСТОЯНКА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2120528C1 |
| Склад для хранения шин | 1986 |
|
SU1404419A1 |
| Механизированный склад | 1981 |
|
SU958273A1 |
| МНОГОЯРУСНАЯ МЕХАНИЗИРОВАННАЯ АВТОСТОЯНКА | 1999 |
|
RU2188290C2 |
| МНОГОЯРУСНАЯ МЕХАНИЗИРОВАННАЯ АВТОСТОЯНКА | 1997 |
|
RU2120012C1 |
| АВТОМАТИЗИРОВАННАЯ ТРАНСПОРТНО-СКЛАДСКАЯ СИСТЕМА ДЛЯ КОЛЕСНЫХ ШИН | 1990 |
|
RU2013327C1 |
| Автоматизированный склад | 1978 |
|
SU710874A1 |
| Захватное устройство для контейнеров | 1977 |
|
SU753777A1 |
| КОМПЛЕКС ФОРМОВОЧНЫЙ СТАЦИОНАРНЫЙ ДЛЯ ПРОИЗВОДСТВА БЕТОННЫХ ИЗДЕЛИЙ | 2017 |
|
RU2694671C1 |
| Устройство для упаковки пакета изделий | 1980 |
|
SU943108A1 |