Известны устройства для компенсации ошибок стендов, которые управляются от цифровой вычислительной машины (ЦВМ) в соответствия € 1нрограммой испытательного алгоритма и Предназначены для испытаний различного рода атпаратуры.
Предлагаемое устройство отличается тем, что в нем цифровой жорректИрующий фильтр установлен между у1травляюш,ей цифровой вычислительной машииой и (Преобразователем «:код-напряжение, выход которого подключен к .приводу динамического стенда, связанного через последовательно соединенные преобразователи «угол-КОД и «код-КОД с блоком вычисления .nonpaBOiK. Второй выход управляющей циф;ровой вычислительной машины через блок вычисления поП1ра1В«и подключен К (приводу на шаговом двигателе, тричем выход -привода и выход реальной аппаратуры, раэмещсиной на динaмичeeкoiM стенде, подсоеди«еиы к общему выходному суММатору.
Это позволяет упростить устройство ,и повысить точность воспроизведения углового перемещения.
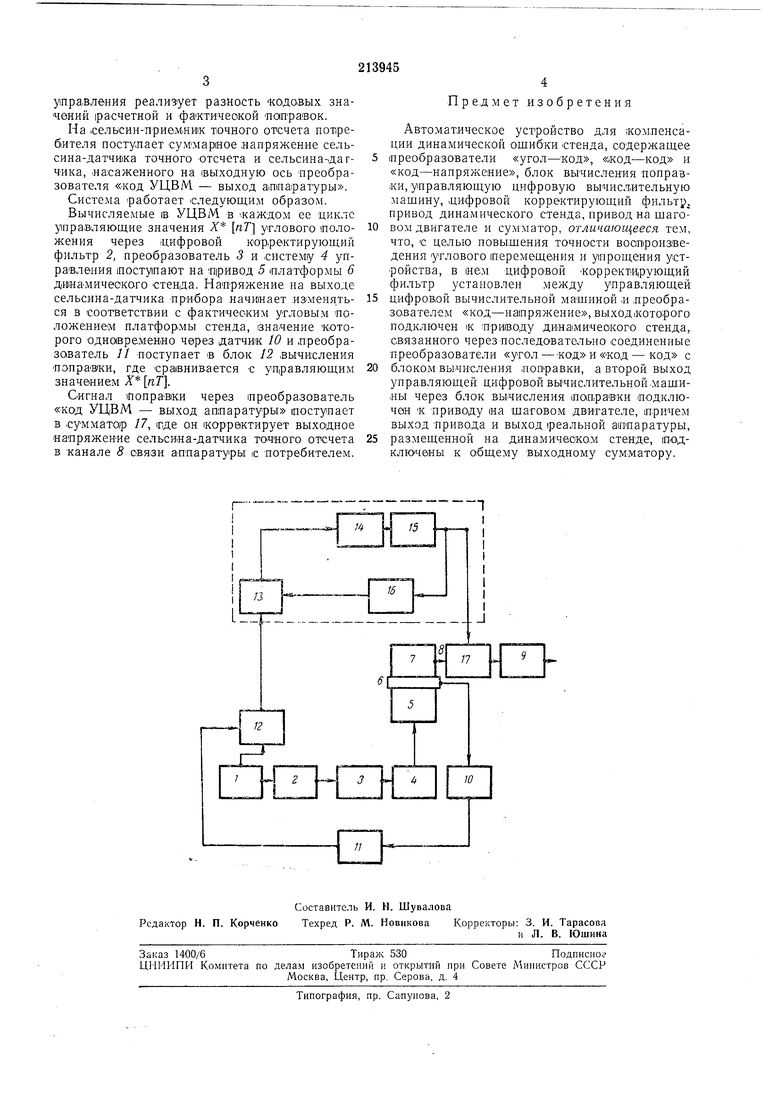
На чертеже показана блок-схема лредлагаемого устройства.
О,но включает управляющую цифровую вычислительную машину (УЦВМ) 1, цифровой корректирующий фильтр 2, преобразователь 3 «КОД-напряжение, систему- управления приводом динамического стенда, привод 5 стенда.
платфор.му 6 стенда, реальную аппарагуру 7, размещенную да стенде, жанал 8 связи аппаратуры с Потребителем, потребитель 9 угловой информации, цифровой датчик 10 углового положения платфор-мы стенда, преобразователь 11 «код-код, блок 12 вычисления поправки, регистр 13 разности с логикой управления, блок 14 управления шаговым двигателем, шаговый двигатель 15 с редукторОМ, преобразователь 16 «угол-код и сумматор 17 (блоки 13-16 образуют привод на шаговом двигателе).
Система 4 управления приводом стенда совместно с приводом 5 представляет обычную следящую систему с обратной связью через потенциометр, насаженный на ось платформы.
Канал 8 связи аетпаратуры с потребителем реализован IB Виде сельсинной передачи с системой грубо-точного отсчета. Сельсин-датчнк насажен на выходную ось прибора, а сельсинприемник конструктивно размещен в потребителе. Цифровой датчик /( углового положения платфорМЫ стенда преобразует угловые перемещения платфор-мы в код Грея, а преобразователь // - код Грея в код УЦВМ.
БлоК 12 вычисления поправки реализован программно в УЦВМ. Математически сигнал направки является реакцией .модели аппаратуры на разностный сигнал фактического и расчетного значений угловых положений платформы стенда. Регистр 13 разности с логикой
управления реализует разность -кодовых значений расчетной и фактической поправок.
На ,сельсин-прием.ни1к точного отсчета потребителя поступает суммарное напряжение сельсина-датчи1ка точного отсчета и сельсина-дагЧИка, .насаженного на выходную ось преобразователя «код УЦВМ - выход алпаратуры.
Система работает следующим образом.
Вычисляемые IB УЦВМ в жаждом ее цикле управляющие значения X пТ углового (положения через цифровой корректирующий фильтр 2, преобразователь 3 и систему 4 управления поступают на привод 5 платформы 6 динамического стенда. Напряжение на выходе сельсина-датчика Прябора начинает .изменяться в соответствии с фактическим угловым положением платформы стенда, 1зна1чение которого одновременно через датчик 10 и .преобразователь 11 поступает в блок 12 вычисления поправки, где сравнивается с управляющим значением X пТ.
Сигнал (Поправки через преобразователь «код УЦВМ - выход апяаратуры поступает в сумматор /7, где он коррактирует выходное напряжение сельсина-датчика точного отсчета в канале 8 связи аппаратуры с потребителем.
Ц редмет изобретения
Автоматическое устройство для компенсации динамической ошибки стенда, содержащее
преобразователи «угол-код, «код-код и «код-напряжение, блок вычисления поправки, управляющую цифровую вычислительную машину, цифровой корректирующий фильту, привод динамического стенда, привод на шаговом двигателе и сумматор, отличающееся тем, что, с целью повышения точности воспроизведения углового |перемещения и упрощения устройства, в нем цифровой корректирующий фильтр устаиовлен между управляющей
цифровой вычислительной машиной и преобразователем «код-напряжение, выхоД|Которого подключен к приводу динамического стенда, связанного через последовательно соединенные преобразователи «угол код и «код - код с
блоком вычисления поправки, а второй выход управляющей цифровой вычислительной машины через блок вычисления поправки подключен к приводу на шаговом двигателе, причем выход привода и выход реальной аппаратуры,
размещенной на динамическом стенде, подключены к общему выходному сумматору.
| название | год | авторы | номер документа |
|---|---|---|---|
| ШИРОКОДИАПАЗОННЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 2008 |
|
RU2378618C2 |
| СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 2007 |
|
RU2339912C1 |
| УНИВЕРСАЛЬНЫЙ ШИРОКОДИАПАЗОННЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 2012 |
|
RU2494345C1 |
| УНИВЕРСАЛЬНЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ПРЕЦИЗИОННЫХ ГИРОСКОПИЧЕСКИХ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 2009 |
|
RU2403538C1 |
| ШИРОКОДИАПАЗОННЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВЫХ СКОРОСТЕЙ | 1996 |
|
RU2142643C1 |
| СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВЫХ СКОРОСТЕЙ | 1995 |
|
RU2115128C1 |
| СПОСОБ ПРОГРАММНОГО УПРАВЛЕНИЯ ШАГОВЫМ ПЕРЕМЕЩЕНИЕМ ПОСРЕДСТВОМ ШАГОВОГО ЭЛЕКТРОДВИГАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
SU1795861A1 |
| Преобразователь кода в угол поворота вала | 1977 |
|
SU703903A1 |
| ПОВОРОТНАЯ УСТАНОВКА | 1968 |
|
SU231181A1 |
| Универсальный прецизионный мехатронный стенд с инерциальными чувствительными элементами для контроля гироскопических измерителей угловой скорости | 2022 |
|
RU2804762C1 |
15
/7
