Известны манипуляторы, содержащие телескопическую передачу и пневмоприсос.
Цель изобретения - обеспечить отвод обработанной детали вместе с пневмоприсосом после отрезки от технологической прибыли. Это достигается тем, что вращающийся пневмоприсос предложенного манипулятора снабжен сервоприводом.
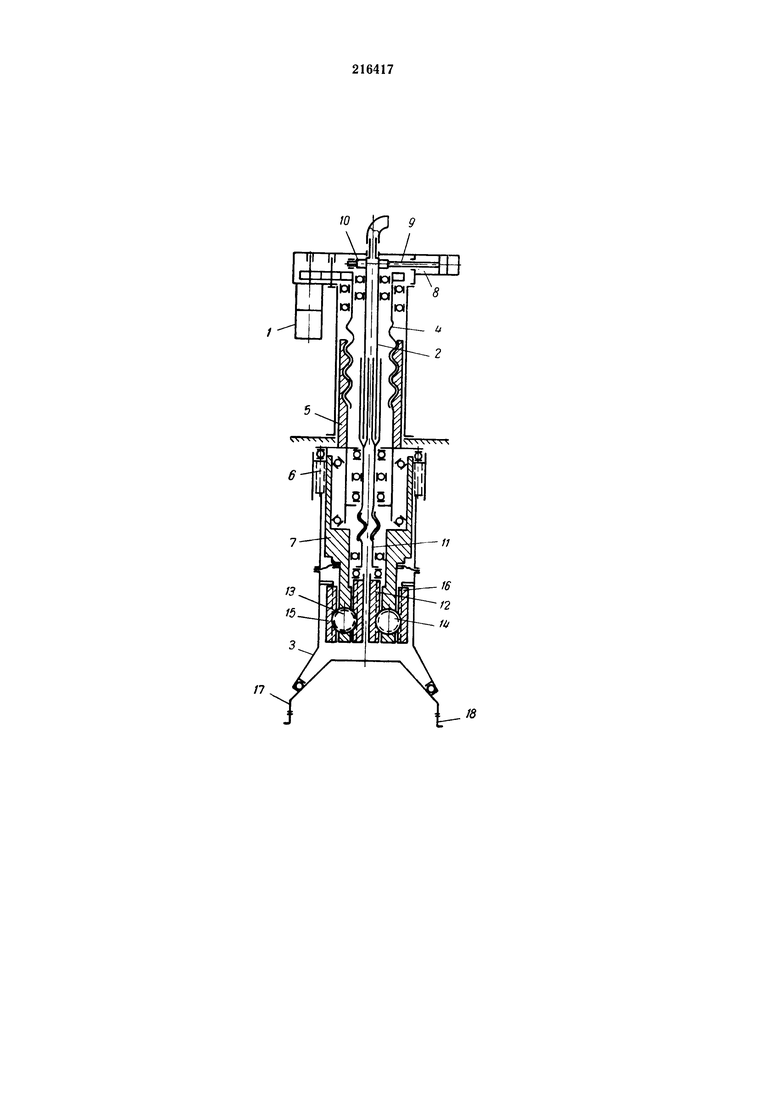
На чертеже представлена кинематическая схема манипулятора.
Погрузочный манипулятор состоит из привода 1, содержащего редуктор с электродвигателем, телескопической передачи 2 и пневмоприсоса с вакуумной чашей 3.
Манипулятор работает следующим образом.
Основное транспортирующее перемещение вакуумной чаши вдоль оси манипулятора происходит от привода 1 через ходовой винт 4 и гильзу с гайкой 5. Остановка гильзы в нужных положениях производится конечными выключателями (на чертеже не показаны). Для компенсации неточности остановки манипулятора служит пружина 6.
После окончания обработки детали манипулятор перемещают к шпиндельному устройству, и при включении вакуума вакуумная чаша жестко соединяется с деталью. При отрезке детали от технологической прибыли вместе с деталью вращается и обойма 7 с вакуумной чашей 3. Одновременно включается гидроцилиндр 8 с поршнем, передающим усилие через рейку 9, зубчатое колесо 10, телескопическую передачу 2 и винт 11 на рейку 12. Это усилие передается чаше 3 через шестерни 13, 14, рейки 15, 16 и отводит отрезанную деталь 17 от прибыли 18.
Усилие отвода детали регулируется давлением в гидроцилиндре 8.
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1974 |
|
SU547336A1 |
| Автоматическая линия спутникового типа | 1985 |
|
SU1505757A1 |
| Станок для обработки отверстий | 1988 |
|
SU1722700A1 |
| ФРЕЗЕРНЫЙ СТАНОК | 1969 |
|
SU252049A1 |
| МНОГОПОТОЧНАЯ МЕХАНИЗИРОВАННАЯ ЛИНИЯ | 1970 |
|
SU283452A1 |
| Устройство для переноса заготовок между позициями обрабатывающей машины | 1984 |
|
SU1162534A1 |
| Автомат для навивки пружин | 1980 |
|
SU895576A1 |
| УНИВЕРСАЛЬНЫЙ АРТИЛЛЕРИЙСКИЙ КОМПЛЕКС ДЛЯ ТЕЛЕСКОПИЧЕСКОГО ПАТРОНА | 2018 |
|
RU2696949C2 |
| Многоцелевой станок | 1989 |
|
SU1660937A1 |
| Устройство для обработки труб под сварку | 1988 |
|
SU1556828A1 |
Погрузочный манипулятор, содержащий привод, телескопическую передачу и пневмоприсос, отличающийся тем, что, с целью отвода обработанной детали вместе с пневмоприсосом после отрезки технологической прибыли, вращающийся пневмоприсос снабжен сервоприводом.
