Известны устройства программирования и контроля хода шахтных подъемных машин, включающие сменную пару шестерен, блоки программирования, блоки этажных выключателей, блоки сельсинных датчиков и приводной редуктор, выполненный из двух симметричных частей.
В предложенном устройстве для повышения надежности, упрош,ения конструкции и обеспечения контроля целостности кинематических и электрических цепей, симметричные части приводного редуктора кинематически связаны между собой при помощи дифференциала и снабжены тахогенераторными датчиками.
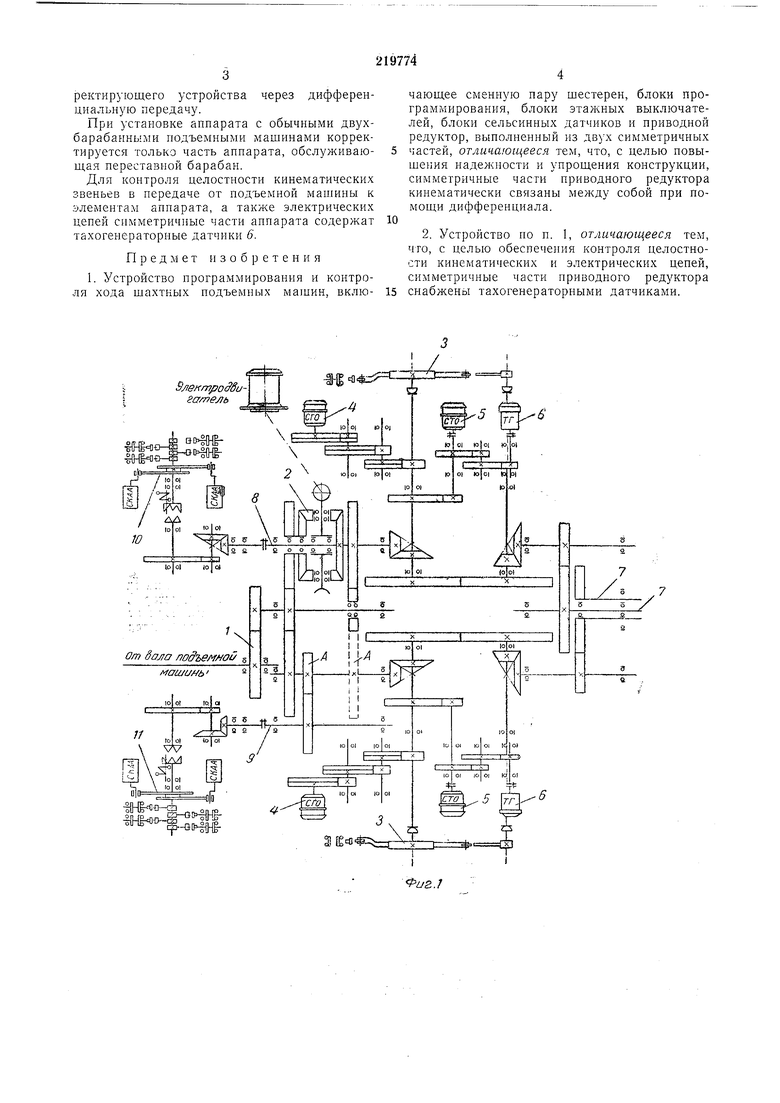
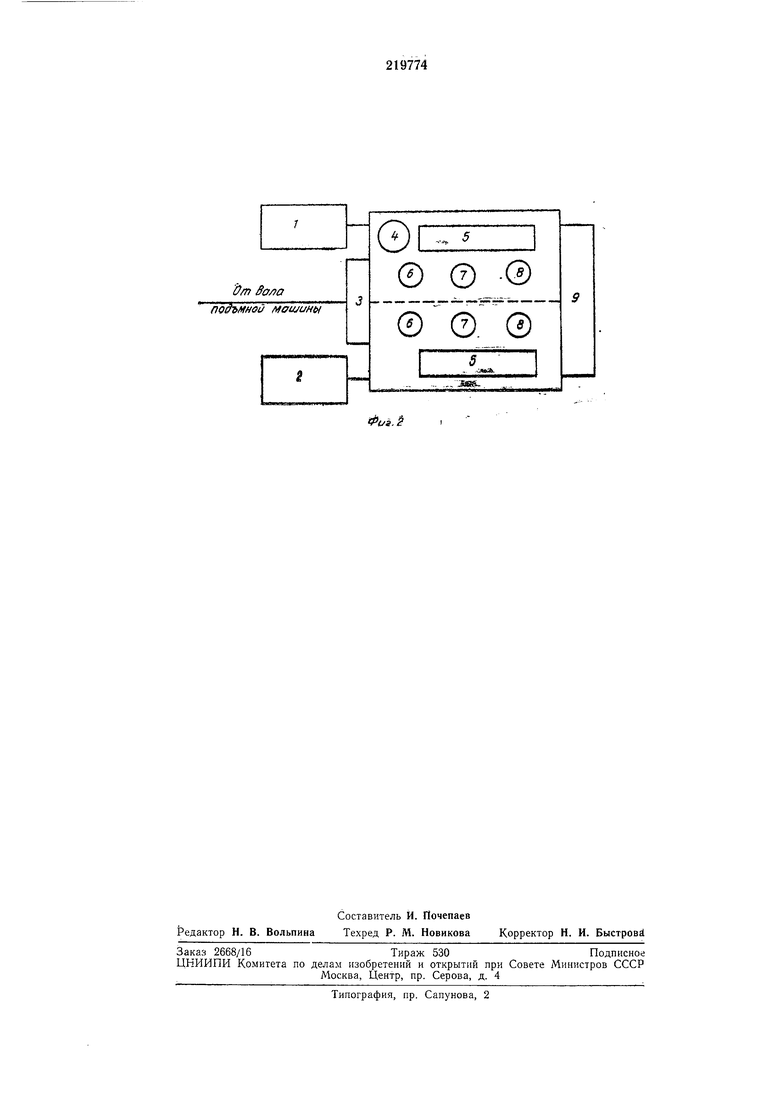
На фиг. 1 изображена кинематическая схема устройства; на фиг. 2 - структурная схема ацпарата и контроля хода шахтных подъемных машин.
Устройство включает сменную пару одноступенчатого редуктора 1, дифференциал 2, блоки этажных выключателей 3, блоки сельсинных датчиков 4 и 5, тахогенераторные датчики 6, выходные валы к регулятору ограничения скорости 7, выходные валы к блокам программирования 8 и 9, блоки программирования 10 и 11 Н переставную шестерню Л приводного редуктора.
подъемной машины передается на одноступенчатый промежуточный редуктор 1, установленный на входе аппарата. При этом набор сменных пар редуктора принимается так, чтобы обеспечить работу аппарата на любую глубину подъема независимо от типа подъемной машины.
От промежуточного редуктора вращение передается на симметричные части приводного редуктора аппарата: блокам этажных выключателей 3, блокам сельсинных датчиков 4 и 5, тахогенераторным датчикам 6, регулятору ограничения скорости 7 и программным устройствам 10 и 11.
При этом вращение к указанным звеньям аппарата от промежуточного редуктора передается или через дифференциал 2 и шестерню А (как показано пунктиром) на обе симметричные части аппарата, или через дифференциальную передачу к одной части и шестерню (как показано сплошной линией) на другую часть.
Положение шестерни А в приводном редукторе аппарата определяется при первоначальной установке аппарата на подъеме в зависимости от типа подъемной машины.
При применении аппарата для управления подъемными машинами со шкивами трения обе части аппарата приводятся во вращение
ректирующего устройства через дифференциальную передачу.
При установке аппарата с обычными двухбарабанными подъемными машинами корректируется только часть аппарата, обслуживающая переставной барабан.
Для контроля целостности кинематических звеньев в передаче от подъемной машины к элементам аппарата, а также электрических цепей симметричные части аппарата содержат тахогенераторные датчики 6.
Предмет изобретения
1. Устройство программирования и контроля хода шахтных подъемных машин, включаюш.ее сменную пару шестерен, блоки программирования, блоки этажных выключателей, блоки сельсинных датчиков и приводной редуктор, выполненный из двух симметричных частей, отличающееся тем, что, с целью повышения надежности и упрош,ения конструкции, симметричные части приводного редуктора кинематически связаны между собой при помоши дифференциала.
2. Устройство ио п. 1, отличающееся тем, что, с целью обеспечения контроля целостности кинематических и электрических цепей, симметричные части нриводного редуктора снабжены тахогенераторными датчиками.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство программирования и контроля хода шахтных подъемных машин | 1981 |
|
SU983018A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ, КОНТРОЛЯ ДВИЖЕНИЯ И ТЕХНОЛОГИЧЕСКИХ ЗАЩИТ ШАХТНОЙ ПОДЪЕМНОЙ УСТАНОВКИ | 2005 |
|
RU2314990C2 |
| Привод барабанных летучих ножниц | 1973 |
|
SU524687A1 |
| Кабелеукладчик | 1988 |
|
SU1595787A1 |
| УСТРОЙСТВО ЗАЩИТЫ И КОНТРОЛЯ ШАХТНОЙ ПОДЪЕМНОЙ УСТАНОВКИ | 1996 |
|
RU2114043C1 |
| РОТОРНЫЙ ЭКСКАВАТОР | 1969 |
|
SU244209A1 |
| Устройство для выравнивания скорости ножей летучих ножниц | 1980 |
|
SU975256A1 |
| Устройство для регулируемого предохранительного торможения подъемной машины | 1977 |
|
SU787348A2 |
| Станок для изготовления по модели объемных изделий сложной формы | 1980 |
|
SU918116A1 |
| РОВНИЧНАЯ МАШИНА | 1972 |
|
SU327273A1 |
9/ ектро/ виSamejjbОт дала подъемной MOUJUffb
