Изобретение относится к подъемно- транспортному оборудованию, а именно к автоматическим захватам для изделий с вертикальными отверстиями, и является дополнительным к авт.св. . № 626017.
Цель изобретения - повышение надежности работы устройства.
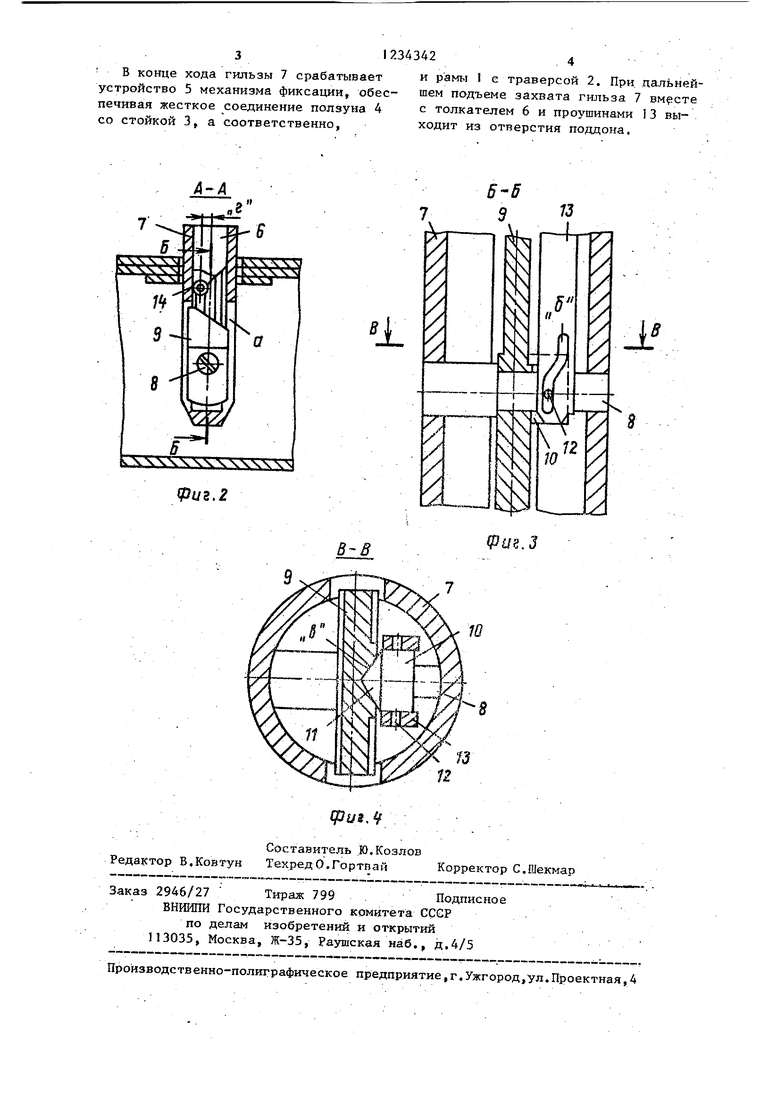
На фиг,1 показан предлагаемый захват (аксонометрическая схема), общий вид; на фиг.2 - сечение А-А на фиг.1; на фиг.З - сечение Б-Б на фиг.2; на фиг.4 - сечение В-В на фиг.3.
Автоматический захват содержит раму 1, соединенную с подвижной траверсой 2 посредством механизма фиксации, выполненного в виде направляющей стойки 3, смонтированной на раме, и закрепленного на траверсе ползуна 4, связанных между собой стопорным устройством 5 механизма фиксации.
Каждый захватный орган выполнен в .виде закрепленного на раме штокового толкателя 6, размещенного в жестко соединенной с траверсой направляющей гильзе 7 с прорезью а, в которой на оси 8 смонтирован опорный оычаг 9, а на одной из сторон оси 8 установлена подвижная втулка 10 с фиксирующим зубом 11 и поводками 12, установленными в фигурных пазах б проупган 13, которые жестко связаны с толкателем- 6.-.Поворотный рычаг 9 выполнен с гнездом в, копирующим наружную поверхность зуба П.
На свободном конце толкателя 6 закреплен ролик 14, ось .которо.го смщена на расстояние г относительно оси В.
В нижней части рамы 1 закреплены .ограничительные упоры 15, а на траверсе 2 имеется-грузовая серьга 16, посредством которой захват подве- шивается на крюк крана.
В подвещенном на крюк крана положении без груза стойка 3 механизма фиксации жестко связана с ползуном 4 посредством стопорного устройства 5.
Опорный поворотный рычаг 9 находится в вертикальном положении, поводки 12 размещены в нижней части фигурного паза проушин 13 и зуб 11 размещен в гнезде рычага 9, фиксируя строго вертикальное положение последнего.
Захват работает следующим образом.
При опускании захвата на поддон направляющая гильза 7 входит в отверстие последнего и опускается до тех пор, пока рычаг 9, находящийся в вертикальном положении, не выйдет за пределы нижней поверхности опорной площадки поддона и рама I
упорами 15 не установится на его
верхнюю плоскость. При этом ползун 4 с траверсой 2 и направляющей гильзой 7 за счет собственного веса дви- жется вниз, а вместе с ними и втулка 10, скользя своими поводками 12 в нижней горизонтальной части фигур- Ш.1Х пазов неподвижных проушш 13, на величину хода,.достаточную для сра- батьшания устройства 5 механизма фиксации. Срабатывание устройства 5 обеспечивает свободное перемещение ползуна 4 относительно стойки 3, а соответственно, и траверсы 2 относительно рамы .1.
При подъеме захвата краном за
серьгу 16 траверса 2 вместе с гиль- . ЗОЙ 7, а также втулкой 10 перемещается вверх относительно- неподвижной рамы 1 с толкателем 6 и проушинами
13. При этом втулка 10 своими поводками 12 перемещается в фигурных пазах проушин 13, извлекая зуб 11 из гнезда рычага 9, освобождая последний. При дальнейшем движеньш рычаг
9, взаимодействуя с роликом 14, поворачивается вокруг своей оси, устанавливаясь в горизонтальное положение..Поводки 12 размещаются в верхней части фигурного паза проушин 13
и при дальнейшем движении траверсы вверх рычаг 9 захватывает поддон, который транспортируется к месту раз- гоузки.
На месте разгрузки поддон опускают на опорную площадку. При этом траверса 2 с гильзой 7 за счет собственного веса перемещается вниз относительно рамы 1 на величину, необходимую для свободного поворота рычага 9 за счет дисбаланса. Поводки 12 втулки 10, скользя в фигурных пазах проушин 13, попадают в их наклонную часть и передвигают втулку 10, которая зубом П входит в гнездо рычага 9 и блокирует его в строго вертикальном положении, что гарантирует свободный выход захватных органов из отверстий.
312343424
В конце хода гильзы 7 срабатывает и рамы I с траверсой 2. При. дальней- устройство 5 механизма фиксации, обес- шем подъеме захвата гильза 7 вместе печивая жесткое соединение ползуна 4 с толкателем 6 и проушинами 13 вы- со стойкой 3, а соответственно, ходит из отверстия поддона.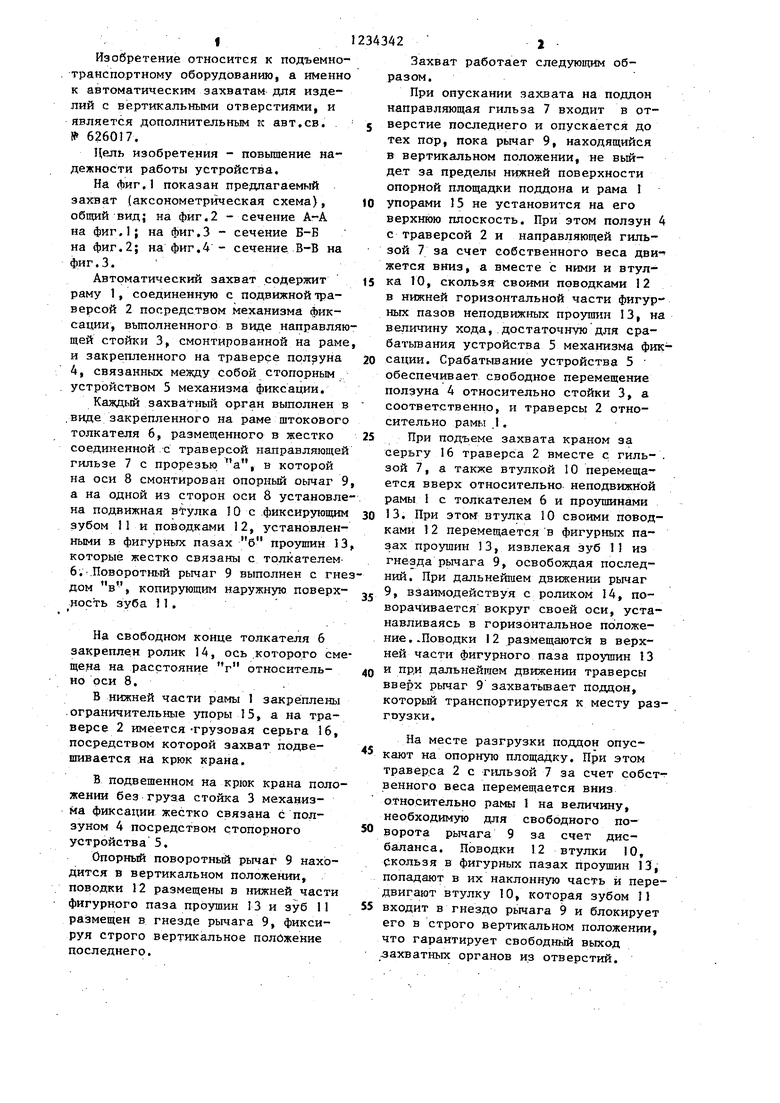
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматический захват для изделий с вертикальными отверстиями | 1977 |
|
SU626017A1 |
| АВТОМАТИЧЕСКИЙ ЗАХВАТ РОДОВИКОВА | 2009 |
|
RU2394747C1 |
| Захватное устройство для грузов с отверстиями | 1983 |
|
SU1119966A1 |
| Грузозахватная система | 1985 |
|
SU1414753A1 |
| УСТРОЙСТВО для ПОДЪЕМА И ТРАНСПОРТИРОВАНИЯ | 1968 |
|
SU220456A1 |
| Захват-раскладчик | 1980 |
|
SU948835A1 |
| ПОГРУЗЧИК ФРОНТАЛЬНЫЙ БЫСТРОМОНТИРУЕМЫЙ | 2012 |
|
RU2515720C2 |
| Захват-кантователь для контейнеров с цапфами | 1984 |
|
SU1221178A1 |
| Захватное устройство для штучных грузов | 1981 |
|
SU1065325A1 |
| Грузозахватное устройство | 1989 |
|
SU1751138A1 |

В
i
Jd
В
i
риг.2
B-S
фич.З
т
п
Составитель .Ю.Козлов Редактор В, Ков тун Техред О. Го р тп а н
Заказ 2946/27 Тираж 799 . Подписное ВНИИПИ Государственного комитета CCGP
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д.4/5
производственно-полиграфическое предприятие,г.Ужгород,ул.Проектная,4
Корректор С.Шекмар
| Автоматический захват для изделий с вертикальными отверстиями | 1977 |
|
SU626017A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
