Известны вычислительные устройства для систем программного управления двухкоординатными перемещениями, содержащие генератор тактовых импульсов, блок ввода программы с трансмиттером, линейный реверсивный интерполятор с реверсивным двоично-десятичным счетчиком, декадные переключатели, схемы совпадения и триггер переключения каналов.
Предлагаемое изобретение позволяет повысить быстродействие и упростить конструкцию устройства.
Это достигается благодаря тому, что генератор тактовых импульсов через схемы совпадения и декадный переключатель подключен к первым двум декадам реверсивного двоично-десятичного счетчика, две последние декады которого связаны между собой через второй декадный переключатель. Последний подсоединен к триггеру переключения каналов, ко второму входу которого подключена последняя декада реверсивного счетчика. Предпоследняя декада счетчика подсоединена к схеме запуска трансмиттера блока ввода программы, выход которой подключен к управляющим входам декадных переключателей.
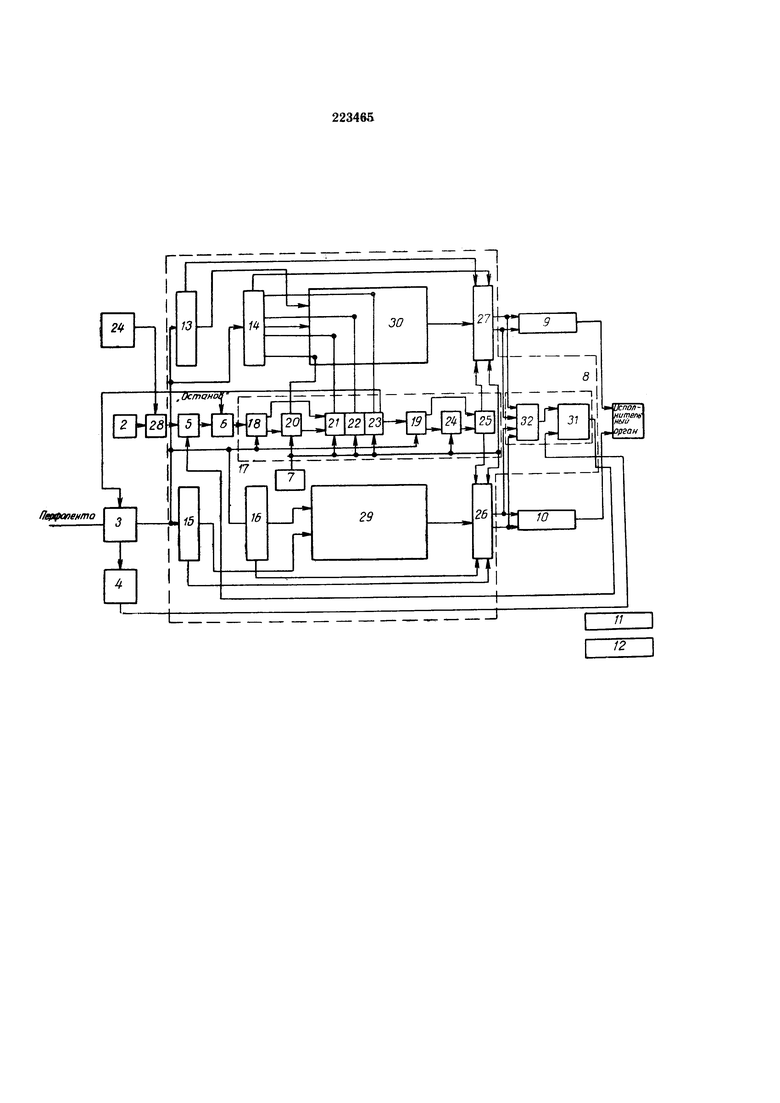
Блок-схема описываемого устройства приведена на чертеже.
Она содержит интерполятор 1, генератор 2 тактовых импульсов, блок 3 ввода программы с трансмиттером (на чертеже не показан), задатчик скорости 4, схемы совпадения 5 и 6, узел 7 работы и отвода, узел 8 стабилизации скорости, блоки «координата X» 9 и «координата У» 10, блок индикации 11 и блок питания 12.
Интерполятор, в свою очередь, содержит регистры 13 и 14 для хранения программы перемещений на двух смежных участках вдоль оси X, регистры 15 и 16 для хранения соответствующих размеров перемещений вдоль оси У, реверсивный пятидекадный счетчик 17 с декадными переключателями 18 и 19, реверсивными декадными счетчиками 20-24 и триггером 25 работы каналов 26 и 27.
Назначение и взаимосвязь перечисленных узлов можно охарактеризовать следующей последовательностью выполнения операций:
1) Координаты Х1, У1 и скорость V1 соответствующие первому участку программы, вводятся из блока 3 ввода программы соответственно в регистры 13 и 15 интерполятора 1 и задатчик скорости 4.
2) По команде «Пуск» с пульта управления интерполятор 1 совместно с узлом 8 стабилизации скорости обеспечивает получение на своих выходах импульсов, суммарная частота которых соответствует величине заданной скорости перемещения V, а количество импульсов к концу завершения программы соответствует установленным перемещениям Х1 и У1. Если в процессе работы устройства возникает короткое замыкание электрода с трафаретом, то координатный стол отводится в направлении к исходному положению по той же программе траектории и с той же скоростью путем переключения знаков каналов на выходе интерполятора 1 и реверса счетчика 17. После этого в системе восстанавливается рабочий режим. При обрыве проволоки поступает команда «останов», запирается схема совпадения 6 и поступление импульсов в интерполятор 1 от генератора 2 прекращается. После окончания программы запирается схема совпадения 28. Работа схемы совпадения 5 связана с узлом стабилизации скорости и будет объяснена ниже.
3) За время, необходимое для ввода следующей подпрограммы, но после перемещения электрода от начала на расстояние, достаточное для отвода по текущей программе в случае короткого замыкания (время определяется по величине заполнения счетчика 17), осуществляется ввод кодов Х2 и У2 в регистры 14 и 16 и скорости V1 в задатчик скорости 4, причем процесс обработки при этом не нарушается.
4) В момент окончания первого участка программы, фиксируемый как результат переполнения реверсивного счетчика 17 (переключается триггер 25 работы каналов), к выходу интерполятора подключаются каналы вентильных матриц 29 и 30: работа Х2, отвод X2, работа У2, отвод У2 - вместо каналов: работа X1, отвод Х1, работа У1, отвод У1 - в результате чего осуществляется автоматический переход к следующему участку без останова технологического процесса обработки. В случае необходимости отвода электрода с автоматическим переходом на предыдущую программу координаты X1, У1 в регистрах 13, 15 временно сохраняются, пока электрод не переместится от точки переключения программы на достаточную величину. Затем в регистры 13 и 15 вводятся координаты Х3, У3, чем обеспечивается подготовка к выполнению очередной программы.
Таким образом, работа схемы подразделяется на четные и нечетные циклы, определяемые состоянием триггера 25 работы каналов, переключающего совместно с триггерами знака регистров 13-16 каналы на выходе интерполятора 1.
Интерполятор 1 обеспечивает получение на выходах переключателей каналов 26 и 27 частоты и количества импульсов, соответствующих на отдельных участках программы кодам перемещений, вводимым в регистры 13-16, и заданной скорости V1. Передача импульсов с выхода интерполятора в блоки 9 к 10 осуществляется по двум каналам, в зависимости от знака перемещений. Цена каждого импульса соответствует перемещению в 0,001 мм.
Принцип работы интерполятора основан на подекадном умножении с помощью схем совпадений импульсов, возникающих при переключении триггеров декадных счетчиков 20-24 реверсивного счетчика 17, на содержимое декад регистров 13-16. Количество и схема соединения вентилей в матрицах 29 и 30 рассчитаны на параллельное умножение количества поступивших от генератора 2 импульсов через схемы совпадений 5, 6 и 28 на вход реверсивного счетчика 17, одновременно на содержимое регистров 13, 15 и 14, 16, а также при работе счетчика 17 как в прямом, так и обратном направлениях. Полученный результат умножения по четырем каналам (работа Х1, Х2, отвод Х1, Х2 или работа У1, У2) передается в переключатели каналов 26 и 27.
Общее количество импульсов на выходах матриц зависит от положения декадных переключателей 18 и 19. Если переключатель 18 пропускает импульсы на вход первой реверсивной счетной декады 20, а переключатель 19 - с выхода декады 23 на вход триггера 25 знака, минуя декаду 24, то на выходах каналов «Работа X1» и «Работа Х2» появится количество импульсов, равное:

где n1, n2, n3, n4 - содержимое декад регистров 13 и 14;
k - количество импульсов, поступившее на вход счетчика 17 при счете в прямом направлении относительно начала отсчета. При количестве импульсов k=104, соответствующем моменту переполнения счетчика 17, получим:
Nxl, х2=n4·103+n3·102+n2·10+n1.
Реверсивный счетчик 17 обслуживает одновременно обе матрицы 29 и 30, поэтому за период полного заполнения счетчика 17 количество импульсов на выходах матрицы 29 окажется равным содержимому регистров 15 и 16. При включении в схему счетчика 17 дополнительной декады 24 с помощью переключателя 19 его емкость увеличивается с 104 до 105, поэтому за период полного заполнения на выходе матриц 29 и 30 появится удесятеренное число импульсов.
В случае, если содержимое старших декад регистров 13, 15 или 14, 16 равно нулю (n4=0), в схеме предусмотрена возможность выключения из реверсивного счетчика 17 первой декады 20 с помощью декадного переключателя 18, который обеспечивает переключение выхода схемы совпадения 6 непосредственно на вход реверсивной декады 20.
Отключение декады 20 приводит к увеличению постоянных коэффициентов при втором слагаемом в формуле (1) в десять раз, но одновременно в такое же число раз уменьшается и емкость реверсивного счетчика 17, поэтому количество импульсов на выходах вентильных матриц 29 и 30 за период заполнения счетчика 17 остается неизменным, но зато скорость получения этих импульсов в десять раз возрастает.
Изменение количества и схемы соединения декад переключателями 18 и 19 в реверсивном счетчике 17 производится с целью нормализации вводимых в систему управления кодов программ, чем обеспечивается повышение точности и равномерное во времени распределение импульсов на выходе интерполятора с частотой, определяемой задатчиком скорости 4.
Управление переключателями 18 и 19 в регистрах осуществляется блоком 3 по максимальному значению координат max[Х1, У1].
Независимо от величины задаваемых приращений размеров X, У на отдельных участках программы обработки цена одного импульса на выходе интерполятора составляет 0,001 мм. В диапазоне max[Х, У]=10 - 100 мм; это обеспечивается путем умножения содержимого декад регистров 13-16 на 10, благодаря включению в схему реверсивного счетчика 17 декады 24.
Полученные в задатчике скорости 4 импульсы с частотой fг, пропорциональной заданной скорости перемещения, вводят триггер 31 в состояние «1». Триггер 31 открывает схему совпадения 5, и на вход реверсивного счетчика 17 интерполятора 1 начинают поступать импульсы от задающего генератора 2 с частотой fг=40 кгц. При выбранных в системе значениях скоростей V максимальное значение частоты от задатчика скорости остается, по крайней мере, в десять раз меньшим тактовой частоты fг, поэтому при условии нормализации максимальной координаты в регистрах 13-16 интерполятора 1 за период Tv на одном из его выходов, а следовательно, и на выходе собирательной схемы 32, обязательно появится импульс. Этот импульс переводит триггер 31 в состояние «0», в результате чего доступ импульсов на вход интерполятора 1 прекращается до начала следующего периода Tv. В результате количество импульсов, прошедших на вход интерполятора в течение периода Tv, оказывается обратно пропорциональным максимальной величине записанных в его регистрах координат, а на выходе одного из каналов появляется только один импульс, чем обеспечивается стабилизация суммарной скорости Vx+Vy=Vзaд. При изменении соотношения между величинами заданных приращений X и У результирующий вектор скорости  будет меняться, но максимальное отклонение от заданной скорости Vзaд при Vx≈Vy не превысит
будет меняться, но максимальное отклонение от заданной скорости Vзaд при Vx≈Vy не превысит 
В случае совпадения всех или части импульсов на выходах X и У интерполятора вектор скорости будет возрастать, но отклонение от заданной величины при Vx=Vy также не превысит 
| название | год | авторы | номер документа |
|---|---|---|---|
| Система числового программного управления с постоянной скоростью резания для токарно-винторезных станков | 1981 |
|
SU978102A1 |
| ЛИНЕЙНО-КРУГОВОЙ ИНТЕРПОЛЯТОР | 1991 |
|
RU2010293C1 |
| Устройство для программного управления | 1981 |
|
SU976428A1 |
| ЦИФРОВОЙ ЛИНЕЙНО-КРУГОВОЙ и ЭЛЛИПТИЧЕСКИЙ | 1966 |
|
SU184528A1 |
| Устройство стабилизации скорости резания для токарно-винтовых станков с числовым программным управлением | 1983 |
|
SU1180845A1 |
| Система числового программногоупРАВлЕНия "TPACCA-Кп | 1979 |
|
SU813371A1 |
| Устройство стабилизации скорости резания для токарных станков с ЧПУ | 1983 |
|
SU1136112A1 |
| Устройство для компенсации реактивной мощности | 1990 |
|
SU1746463A1 |
| Устройство для числового программного управления станками | 1985 |
|
SU1291928A1 |
| Цифровой интерполятор | 1984 |
|
SU1238033A1 |
Вычислительное устройство для систем программного управления двухкоординатными перемещениями, содержащее генератор тактовых импульсов, блок ввода программы с. трансмиттером, линейный реверсивный интерполятор с реверсивным двоично-десятичным счетчиком, декадные переключатели, схемы совпадения и триггер переключения каналов, отличающееся тем, что, с целью повышения быстродействия и упрощения устройства, в нем генератор тактовых импульсов через схемы совпадения и декадный переключатель подключен к первым двум декадам реверсивного двоично-десятичного счетчика, две последние декады которого связаны между собой через второй декадный переключатель, подсоединенный к триггеру переключения каналов, ко второму входу которого подключена последняя декада реверсивного счетчика, причем предпоследняя декада счетчика подсоединена к схеме запуска трансмиттера блока ввода программы, выход которой подключен к управляющим входам декадных переключателей.
