Известные автооператоры для загрузки и выгрузки обрабатываемых изделий в станки содержат корпус, цилиндры привода и поджима, шестеренно-реечный механизм и рабочий шток.
Эти автооператоры могут обслуживать лишь один тип станков.
Предложенный автооператор отличается от известных тем, что он снабжен конической шестерней, жестко закрепленной на валу, связанном с приводной шестерней циклового цилиндра, причем эта коническая шестерня зацеплена с шестеренно-реечным механизмом, рейки которого расположены в роторе, свободно посаженном на валу приводной шестерни, и связаны с рабочим штоком, имеющим подвижную шлицевую связь с ротором и проходящим через вал приводной шестерни в полость цилиндра поджима, внутри рабочего штока пропущен неподвижно соединенный с корпусом автооператора штырь.
Это отличие расширяет область применения автооператора и обеспечивает возможность быстрого переналаживания цикла работы.
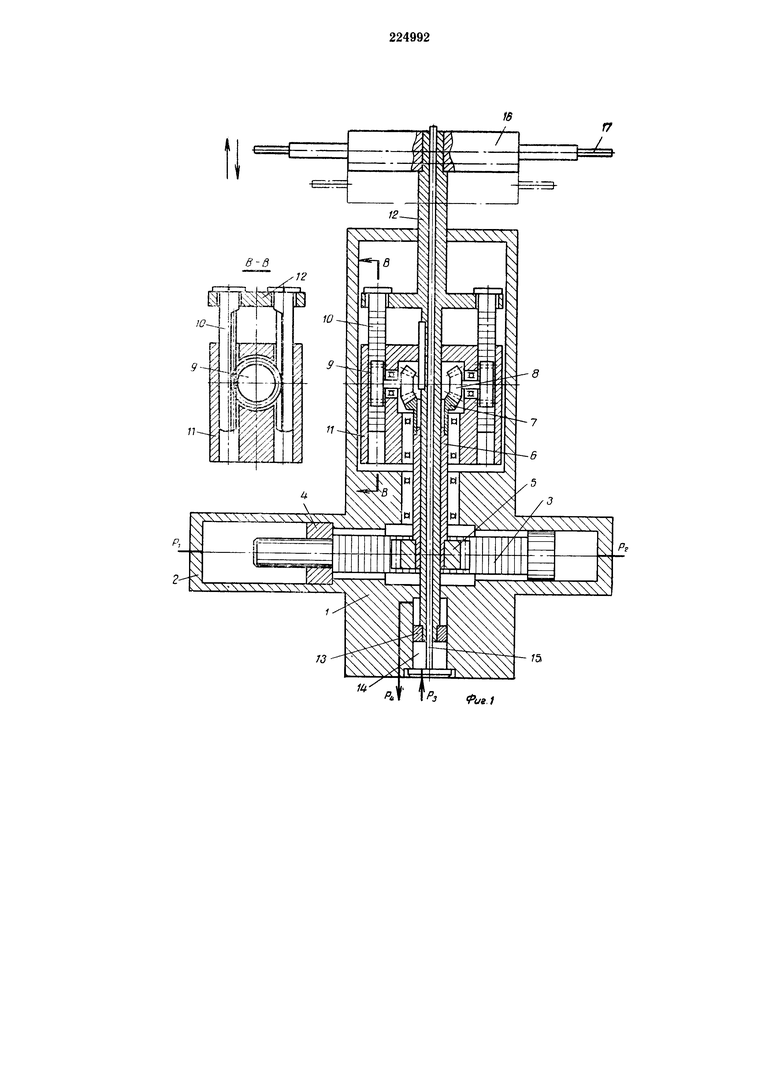
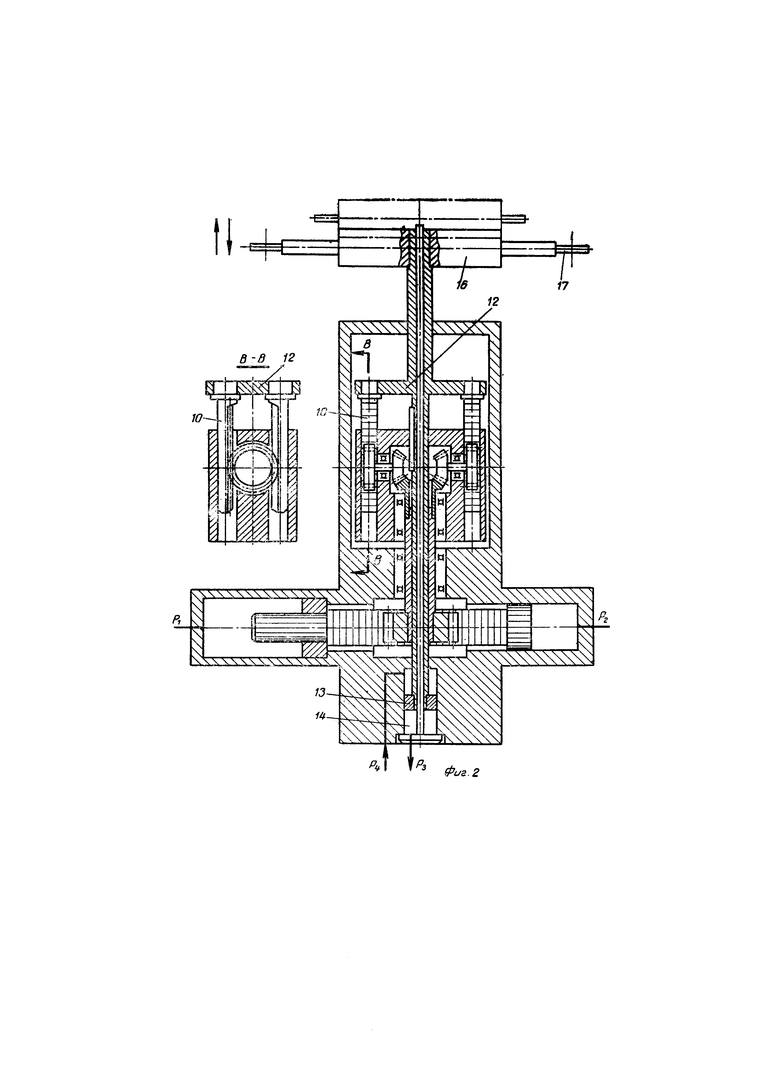
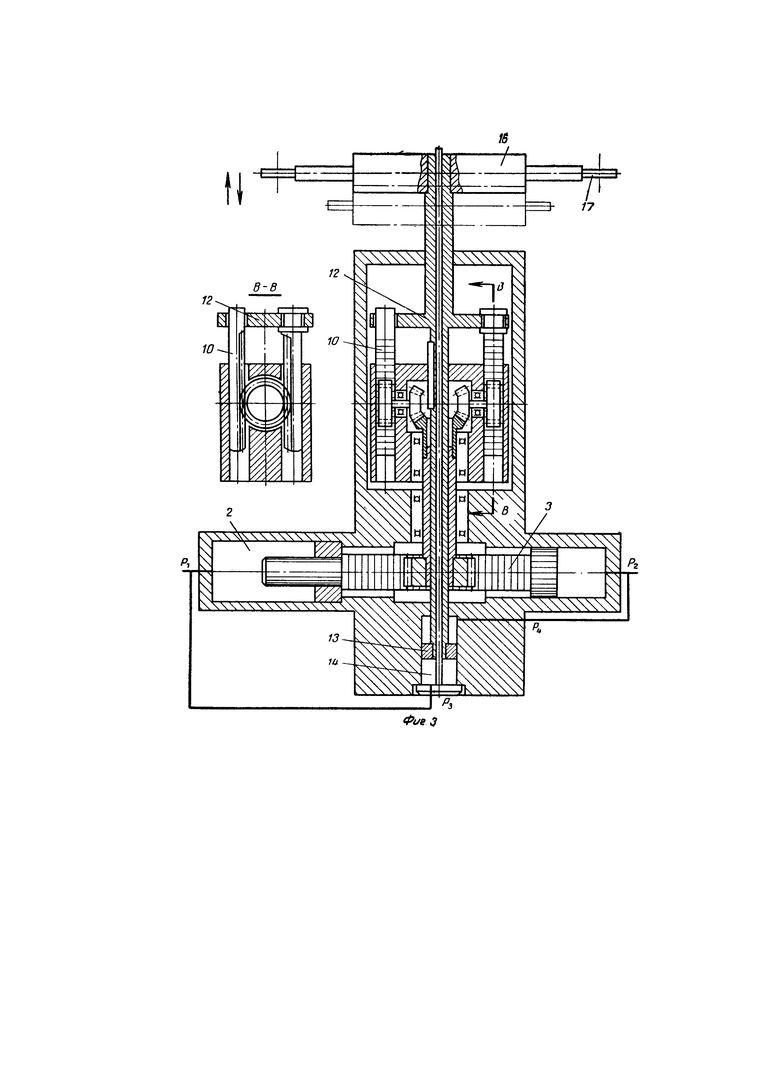
На фиг. 1 показана схема автооператора; на фиг. 2 и 3 - схемы подключения масла к полостям цилиндра поджима.
Автооператор состоит из корпуса 1 со встроенным в него цилиндром 2, в котором перемещаются ступенчатый поршень-рейка 3 и втулка 4. Поршень-рейка 3 находится в зацеплении с приводной шестерней 5, сидящей на одном валу 6 с конической шестерней 7. Коническая шестерня 7 находится в зацеплении с двумя коническими шестернями 8, которые связаны с шестернями 9, входящими в зацепление с рейками 10. Ротор в котором расположены шестерни 8 и 9 и рейки 10, свободно сидит на валу 6. Рабочий шток 12, который сидит на скользящей шпонке, связан с поршнем 13 цилиндра поджима 14. К корпусу 1 жестко крепится штырь 15, который проходит сквозь шток 12. На верхнем конце штока 12, который выходит из корпуса 1, крепится сменная головка 16 с захватами 17.
В нижнюю полость цилиндра 14 подведено постоянное давление, которое держит шток 12 в верхнем положении. При этом фланец штока 12 упирается своим верхним торцом в буртики четырех реек 10.
В исходном положении автооператора за счет давления в левой и правой полостях цилиндра 2 поршень-рейка 3 упирается во втулку 4, которая находится в крайнем правом положении. В нижнюю полость цилиндра 14 подведено постоянное давление и, следовательно, поршень 13 удерживает шток 12, а с ним головку 16 с захватами 17 в верхнем положении, при котором фланец штока 12 упирается в буртики реек 10.
Цикл автооператора начинается с того момента, когда в правой полости цилиндра 2 снимается давление. При этом поршень-рейка 3 начинает перемещаться вправо, а шестерня 5 с ротором 11 и штоком 12 - вращаться по часовой стрелке до упора (упор на чертеже не показан). Когда ротор 11 остановится, начнут вращаться конические шестерни 8 и шестерни 9, а две диаметрально противоположные рейки 10 своими буртиками потянут за фланец шток 12 вниз, преодолевая усилие в нижней полости цилиндра 14 поршнем 13.
После переключения давления поршень-рейка 3 начнет движение влево, а шестерня 5 - вращаться против часовой стрелки. В первую очередь, за счет давления в нижней полости цилиндра 14, поршень 13 начнет двигать вверх шток 12 до упора его фланца в буртики всех четырех реек 10. Затем ротор 11 со штоком 12 начнет вращаться против часовой стрелки до другого упора с последующим движением вниз.
Новое переключение давления вызовет движение поршня 3 вправо. При этом шток 12 с головкой 16 и захватами 17 начнет сначала двигаться вверх, а потом вращаться по часовой стрелке. В среднем положении давление подается в обе полости цилиндра 2 и поршень-рейка останавливается. Этим заканчивается цикл автооператора.
На фиг. 2 автооператор изображен в исходном положении, которое отличается от исходного положения автооператора, изображенного на фиг. 1 только тем, что давление подано в верхнюю полость цилиндра 14 и шток 12 с головкой 16 и захватами 17 находится в нижнем положении. Следовательно, после поворота за счет преодоления давления в верхней полости цилиндра 14, шток 12 с головкой 16 и захватами 17 движется вверх.
На фиг. 3 автооператор изображен в исходном положении, при котором в левой и правой полостях цилиндра 2 и, следовательно, в верхней и нижней полостях цилиндра 14 имеется давление. За счет разности усилий в нижней и верхней полостях цилиндра 14 поршень 13 держит шток 12 с головкой 16 и захватами 17, в верхнем положении. В начале цикла давление в правой полости цилиндра 2 и, следовательно, в верхней полости цилиндра 14 снимается.
Когда заканчивается опускание штока 12, в правой полости цилиндра 2 и в верхней полости цилиндра 14 появляется давление, а в левой полости цилиндра 2 и нижней полости цилиндра 14 давление снимается. Начинается движение поршня-рейки влево. При этом движения вверх не произойдет и шток 12 начнет вращаться против часовой стрелки до упора. Затем за счет преодоления давления в верхней полости цилиндра 14 шток 12 начнет двигаться вверх. После того как давление в полостях цилиндров 2 и 14 снова поменяется, рейка начнет перемещаться вправо. При этом шток 12 будет вращаться по часовой стрелке до среднего положения.
Применением сменных головок можно получить различные траектории движения зажимных органов автооператора. При этом штырь 15 используется как базовая неподвижная деталь.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автооператор для автоматической смены инструмента | 1984 |
|
SU1255371A1 |
| Автооператор | 1970 |
|
SU355848A1 |
| Автооператор | 1984 |
|
SU1191256A1 |
| Автоматизированный комплекс для штамповки крупногабаритных деталей | 1985 |
|
SU1324725A1 |
| Устройство для многоколенной гибки труб | 1990 |
|
SU1734907A1 |
| ШЕСТЕРЕННО-РЕЕЧНАЯ ПОРШНЕВАЯ МАШИНА | 2011 |
|
RU2484255C1 |
| Автооператор | 1976 |
|
SU729028A1 |
| ПОЛУШЕСТЕРЕННО-РЕЕЧНАЯ ПОРШНЕВАЯ МАШИНА | 2012 |
|
RU2483216C1 |
| БИБЛИОТЕКА М. Е. Бараб-Тарле, Е. И. Бслорусец, Т. И. Буйко, Б. А. Додин и Р. Д. Сойфер Одесское специальное конструкторское бюро специальных станков | 1973 |
|
SU389912A1 |
| Манипулятор | 1986 |
|
SU1313688A1 |
Автооператор, содержащий корпус, цилиндры привода и поджима, шестеренно-реечный механизм и рабочий шток, рассчитанный на подключение сменных головок, отличающийся тем, что, с целью расширения области применения автооператора и обеспечения возможности быстрого переналаживания цикла работы, он снабжен конической шестерней, жестко закрепленной на валу, связанном с приводной шестерней циклового цилиндра, причем эта коническая шестерня зацеплена с шестеренно-реечным механизмом, рейки которого расположены в роторе, свободно посаженном на валу приводной шестерни, и связаны с рабочим штоком, имеющим подвижную шлицевую связь с ротором и проходящим через вал приводной шестерни в полость цилиндра поджима, внутри рабочего штока пропущен неподвижно соединенный с корпусом автооператора штырь.
