АВТООПЕРАТОР ДЛЯ ПЕРЕДАЧИ ШТУЧНЫХ ИЗДЕЛИЙ
1
Изобретеиие относится к области станкостроения.
По основному авт. св. № 264125 известен автооператор для передачи патучных изделий, переноса изделий, содержащий приводной гидроцилиндр, механизм переноса изделий, выполненный в виде концентрично расположенных гильз, и механизмы зажима изделий с рычагами, при этом механизмы зажима снабжены круговым кониром, приводным от механизма переноса и взаимодействующим через толкатели с зажимными рычагами, а для обеспечения выдержки по времени на позициях загрузки и выгрузки приводной цилиндр снабжен дополнительным порщнем, выполняющим роль подвижного упора.
С целью расщирения технологических возможностей предлагаемый автооператор снабжен донолнительным механизмом зажима и механизмом переноса изделий, связанным с таким же механизмом общим приводом, выполиенньим в виде гидроцилиидра, щток которого снабжен дополнительной зубчатой нарезкой.
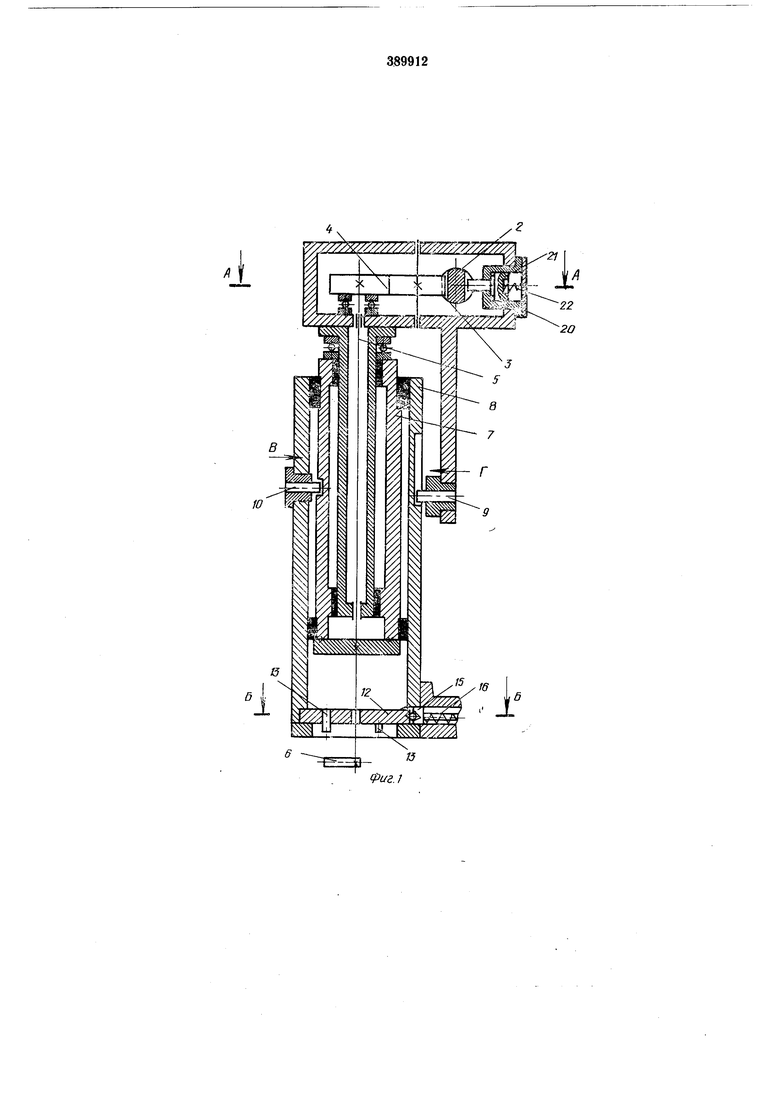
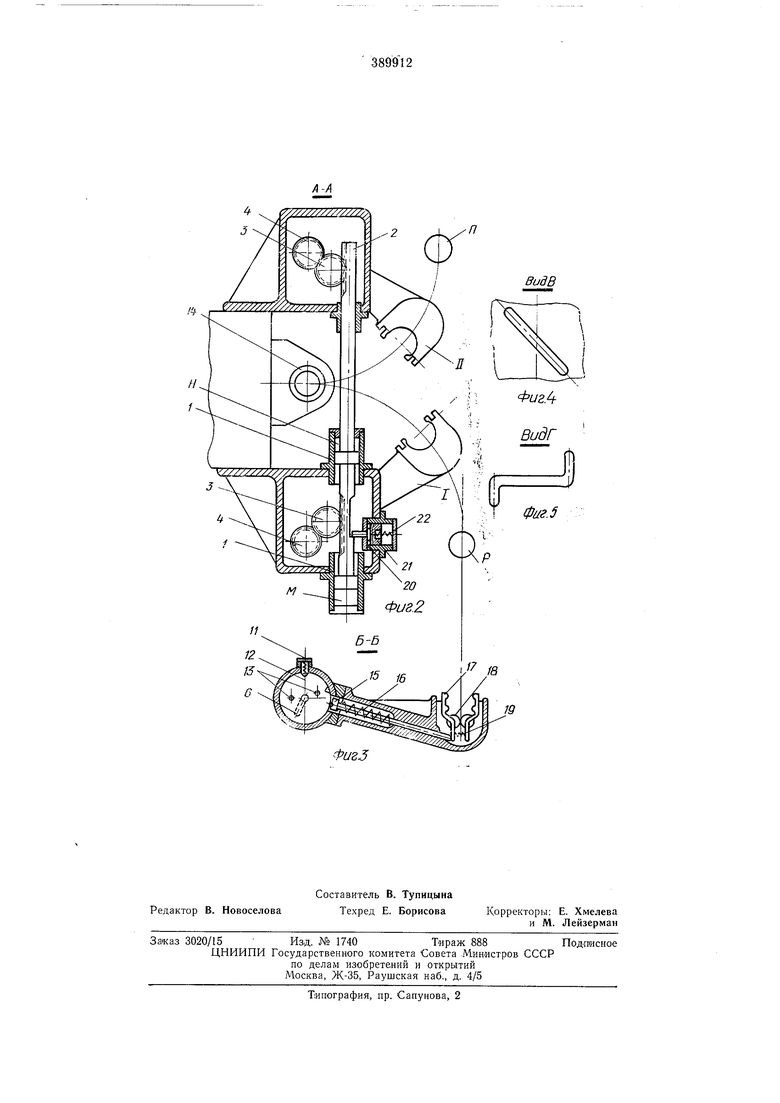
На фиг. 1 изображен предлагаемый автооператор, продольный разрез; на фиг. 2 - разрез ио А-А на фиг. 1; на фиг. 3 - разрез по Б-Б на фиг. 1; на фиг. 4 - вид по стрелке В на фиг. 1; на фиг. 5 - вид по стрелке Г на фиг. 1.
В корпусах гидроцилиндров / расположен шток-рейка 2, связанный кинематически через щестерни 3 и 4 с двумя валами 5. На нижнем конце каждого вала 5 жестко закреплен палец 6. Концентрично валу 5 расположена гильза 7 с профильной канавкой и гильза 8, также имеющая профильную канавку. В канавки гильз 7 и 8 входят соответственно штыри 9 1и 10. В нижней части гильзы 5 расположен фиксатор 11 и круговой копир 12 со щтифтами 13.
К гильзам 8 крепятся руки I и II автоонератора, траектории которых соединяют позиции загрузки Р, выгрузки Я со щии-нделем 14
станка.
Каждая рука состоит из толкателя 15, пружины 16, рычагов 17, соединенных между собой щестернями 18 и поджатыми 19. В верхней части автооператора расположен корпус гидроцилиндра 20, с порщнем 21 и пружиной 22.
В исходном положении (конец обработки изделия на станке) элементы автооператора
занимают следующие положения: щток-рейка 2 naxoAiiTCH в среднем положении, упираясь своим выступом в порщень 21. Шарик фиксатора 11 находится в лунке кругового копира 12, что соответствует разведенному положению зажимных рычагов 17.
Дальнейшее описание дается применительно к руке I.
Штырь 9 находится посередине горизонтального зчастка канавки в гильзе 8. Штырь 10 находится посередине канавки гильзы 7.
Цикл работы I автооператора: поворот на 45° по часовой стрелке до позиции Р; опускание, зажим изделия, подъем до высоты исходного положения, поворот на 90° против часовой стрелки до шпинделя 14, подъем, разжим изделия, опускание до высоты исходного положения, поворот на 45° по часовой стрелке, возврат в исходное положение.
Этот цикл осуш,«ствляется следуюшИМ образом: масло подается в штоковую полость гидроцилипдра 2(9 и в полость М гидроцилиндра /. Поршень 21 уходит вправо, сжимая пружину 22. Шток-рейка, перемещаясь, поворачивает через шестерНИ 3 vi 4 вал 5 по часовой стрелке. Вместе с валом 5 поворачивается гильза 7, увлекая за собой гильзу 8. При этом штырь 9 свободно скользит по горизонтальному участку канавки гильзы 8. Вместе с гильзой 8 поворачивается рука I. Когда штырь 9 доходит до конца горизонтального участка канавки и упирается в ее вертикальную стенку, гильза 7, поворачиваясь, начинает опускать вниз гильзу 8, так как штырь 10 начинает скользить вниз по спиральной канавке гильзы 7. При опусканий гильзы 8 штырь 9 скользит по вертикальному участку ее канавки. Вместе с гильзой В опускается рука I. В конце хода вниз палец 6, цоворачиваясь вместе с валом 5, упирается в штифт 13 и поворачивает круговой копир 12. Толкатель 15 под действием пружины 16 перемещается в направлении оси гильзы 8 за счет попадания шарика в лунку на копире 12. При этом рычаги 17 под действием пружины 19 поворачиваются вокруг осей шестерен 18, осуществляя зажим изделия. Подачей масла в полость Н осуществляется реверсирование штока-рейки 2. При этом штырь 10 скользит
по канавке гильзы 7, поднимая гильзу 8 вместе с рукой I, штырь 9 при подъеме гильзы 8 скользит по вертикальному участку ее канавки.
При переходе штыря 9 на горизонтальный участок канавки подъем закапчивается, начинается поворот руки из позициИ Р к шпинделю 14. При этом штырь 10 находится посередине канавки гильзы 7. По окончании поворота руки I штырь 9 вновь переходит на вертикальную часть канавки. Начинается подъем руки I. При подъеме штырь 10 скользит по канавке до ее верхней точки. В конце подъема палец 6, поворачиваясь вместе с валом
5, нажимает на второй штифт 13, в результате чего происходит разжим изделия. Затем опять реверсирование штока-рейки 2 с одновременным сбросом давления из гидроцилйндра 20. Шток-рейка доходит до положения, при котором уступ на ее образующей упрется в шток 21. На этом цикл работы руки I заканчивается.
Цикл работы руки II, совпадающий с циклом руки I следующий: поворот на 45° по
часовой стрелке до щпинделя 14, подъем, зажим изделия, опускание до высоты исходного положения, поворот на 90° против часовой стрелки до позиции П, опускание, разжим изделия, подъем до высоты исходного положения и поворот на 45° по часовой стрелке - возврат в исходное положение.
Предмет изобретения
Автооператор для передачи штучных изделий по авт. св. № 264125, отличающийся тем, что, с целью расширения технологических возможностей, он снабжен дополнительным механизмом зажима и механизмом переноса
изделий, связанным с таким же механизмом общим приводом, выполненным в виде пидроцилиндра, шток которого снабжен дополнительной зубчатой нарезкой.
Фиг Л
6
ФигЗ
| название | год | авторы | номер документа |
|---|---|---|---|
| Автооператор | 1979 |
|
SU829400A1 |
| Автооператор для смены инструментальных наладок | 1986 |
|
SU1426744A1 |
| Автооператор | 1979 |
|
SU772809A1 |
| Манипулятор | 1991 |
|
SU1813620A1 |
| АВТООПЕРАТОР | 1969 |
|
SU253548A1 |
| Манипулятор | 1986 |
|
SU1400873A1 |
| Автоматическая линия для механической обработки деталей | 1976 |
|
SU580975A1 |
| Загрузочно-разгрузочное устройство | 1987 |
|
SU1491656A1 |
| МАНИПУЛЯТОР | 1991 |
|
RU2032527C1 |
| Автооператор | 1974 |
|
SU492375A1 |