Известны автоматические устройства « грузозахватным органам, например к клещевым захватам подъемиых .механизмов, содержащие .подвеску с фигурным вырезом и фиксатор.
Предлагаем-ое устройство отличается от известных тем, что фиксатор состоит из поворотных BOKipyr укрепленных на лодвеске осей .криволинейного рычага с противовесом, имеющего жестко соединенное с ним кольцо с выступом, ичрычага с противовесом, снабженного зубом, взаимодействующим с выступом кольца при |фиксации положения «лещей во вредмя захвата Г|руза.
Это обеспечивает более надежную автоматизацию работ грузозахватного органа.
На фи;г. 1 схематически изображено предлагаемое устройство в применении к клещевому захвату; на фиг. 2-5 - элементы захватного устройства в работе, в разных положениях.
Устройство имеет подвеску /, шарнирно закрепленную на траверсе 2 клещевого захвата. В подвеаке лредусмот1рен фигурный вырез под .палец 3, заК|репленный на упорном башмаке 4 клещевого захвата. На оси Oi .между двух щек подвески / установлен рычаг 5 с нротиеовесом 6. Рычаг жестко соединен с упорным кольцом 7, .имеющим выступ 8. На оси О шарн.ирно закреплен рычаг 9 с противовесо.м 10
и зубом и, взаимодействующим с выступом упо.рного кольца при фиксации положений клещей /2 во время захвата груза.
На траверсе 1КлещевО ГО захвата укреплен упор 13, ограничивающий отклонение подвески.
Работа устройства характеризуется следующ.ими положениями пе,риодической цикличности.
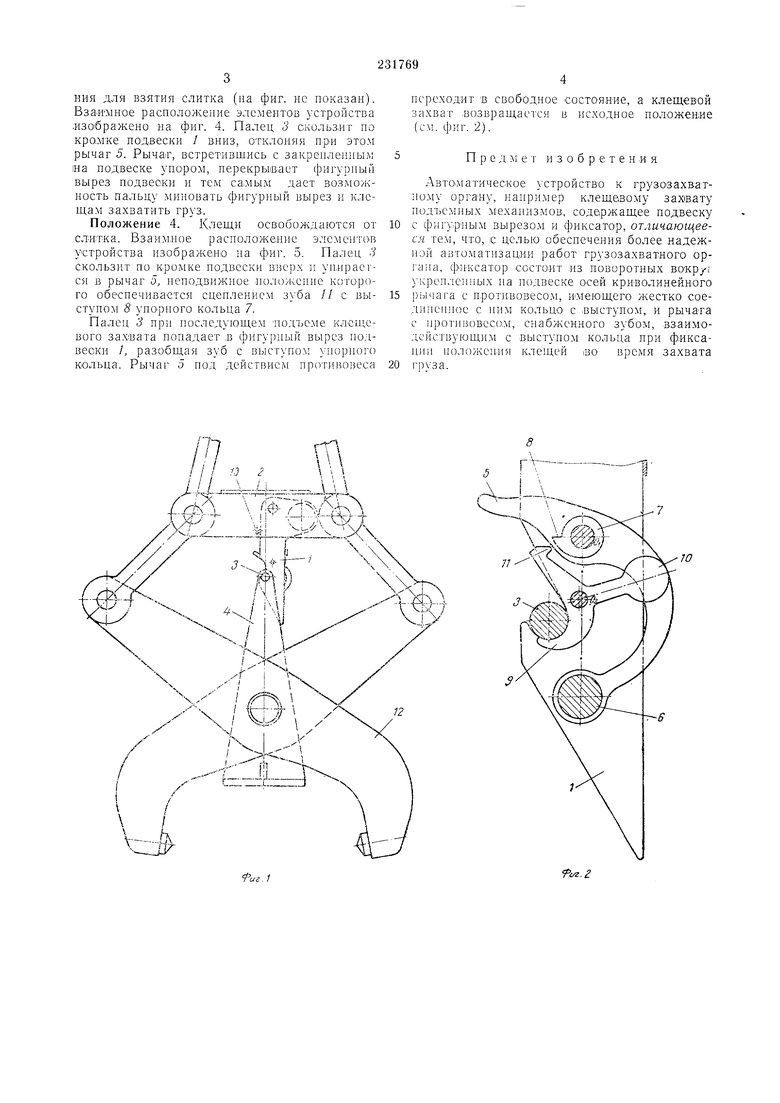
Положение 1. Клещи находятся в полураскрытом состоянии лри переносе их без груза. Взаимное расположение элементов устройства изображено .на фиг. 2. Палец 3 находится в фигурном вырезе лодвески /, не давая клещам складываться; зуб 11 и выступ 8 упор.ного кольца .разобщены, рычаг 5 под действием лротивовеса находится в свободном состоянии.
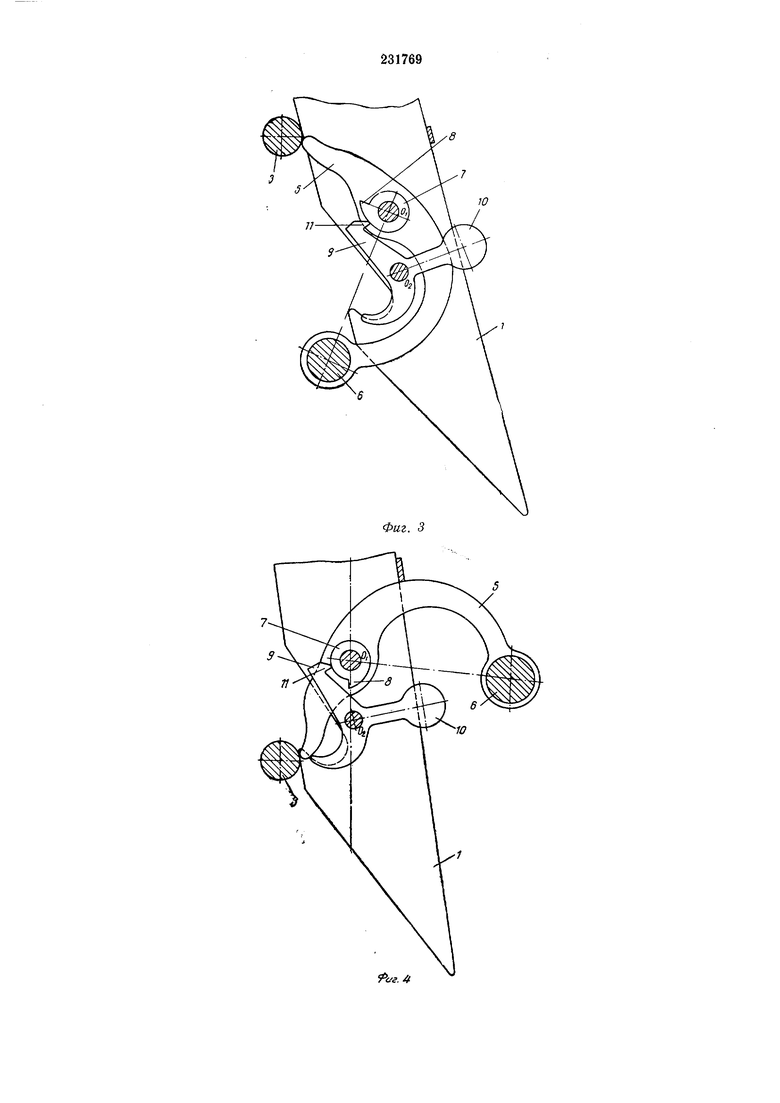
Положение 2. Клещи опущены на слиток (на
фиг. не локазан). Взаимное расположение элементов устройства изображено на фиг. 3. Палец 5 выходитиз фигурного выреза подвески 7, отклоняя при этом свободно висящий рычаг 5. Рычаг 9 под действием лротивовеса 10 выходит из утопленного лоложения и зуб // входит в контакт с упорным кольцом 7 рычага 5. Клещевой захват переходит в полностью раскрытое состояние. Положение 3. Клещевой захват переходит
ния для взятия слитка (на фиг. не показан). Взаимное расноложение элементов устройства изображено на фиг. 4. Палец 3 скользит но кро.мке подвески / вниз, отклоняя нрИ этом рычат 5. , встретившись е закренле1И ым на нодвеске унором, перекрывает фитурный вырез подвески и тем са.мым дает возможность пальцу миновать фигурный вырез и клегцам захватить груз.
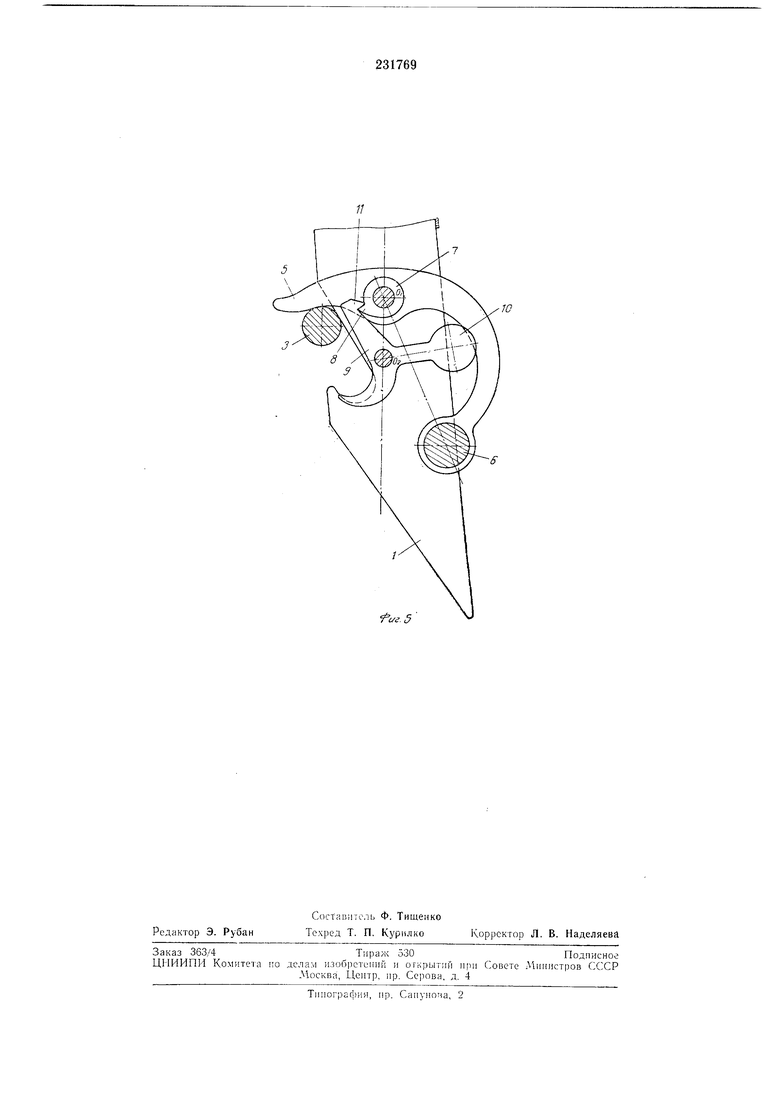
Положение 4. Клещи освобождаются от слитка. Взаимное расположение элементов устройства изображено на фИг. 5. Палец 3 скользит по кромке иодвески Blseiix и уннраегся в рычаг 5, неподвижное но.тоженне которого обеспечивается сцеплением зуба // с выступом 8 упорного кольца 7.
Палец З при последующем подъСМе клещевого захщала попадает в фигурный вырез подвески /, разобщая зуб е выступом упорного кольца. Рычаг 5 под действием npoTiiBoiieca
переходит в свободное состОЯ,н-ие, а клещевой захват .возвращается в исходное ноложеняе (см. фиг. 2).
Предмет изобретения
Авто.матическое устройство к грузозахватному органу, нанрнмер клещевому зах1вату нодъемных механизмов, содержащее подвеску с фигурным вырезо.м и фиксатор, отличающееся тем, что, с целью обеспечения более надежной автоматизации работ грузозахватного органа, фНКСаТОр состоит из новоротных ВОКр/i
укре-нленпых на подвееке осей криволинейного рычага с нротивовеео.м, имеющего жестко соедипеиное с ним кольцо с выстуном, и рычата с протииовесо.м, снабженного зубом, взаимодействующим с выступом кольца нрн фиксации положения клен|ей во время захвата груза.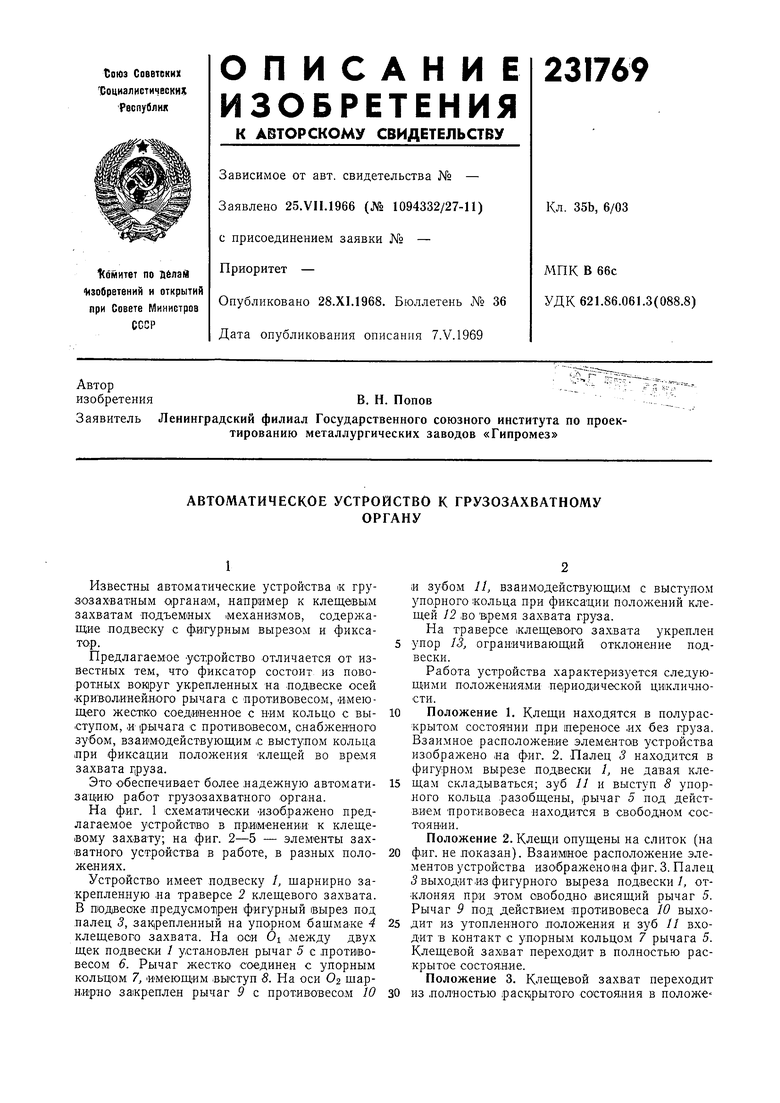
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматическое устройство к грузозахватному органу | 1980 |
|
SU918243A1 |
| Автоматическое устройство к грузозахватному органу | 1982 |
|
SU1093679A2 |
| Грузозахватное устройство | 1989 |
|
SU1751138A1 |
| АВТОМАТИЧЕСКИЙ ЗАХВАТ РОДОВИКОВА | 2009 |
|
RU2394747C1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО ДЛЯ ТРАНСПОРТИРОВКИ СЛИТКОВ | 2006 |
|
RU2309889C1 |
| ЗАХВАТ ДЛЯ МЕШКОВ | 1990 |
|
RU2021197C1 |
| Механизм фиксации элементов грузозахватного устройства | 1984 |
|
SU1253933A1 |
| Зажимные губки,например,для клещевого грузового захвата | 1974 |
|
SU542707A1 |
| Упорное приспособление для контакта с грузом грузозахватного устройства четырехтактного действия | 1990 |
|
SU1773845A1 |
| Грузозахватное устройство | 1986 |
|
SU1393760A2 |
.,. .. . ....
,
.-
i/г./
.
JO
Фиг. 3
fu.S
