Известны устройства для измерения курсовых углов самоходной машины, вынолиенные в виде гироскопических датчиков.
Недостатками этих устройств являются наличие динамической погрешности, связанной с инерционностью и ограниченной чувствительностью гироскопа-датчика, необходимость в специальных источниках питания для мотора гироскопа, низкая надежность в условиях ударных и вибрационных нагрузок и довольно высокая стоимость.
С целью непосредственного измерения угла и упрощения конструкции предложенное устройство состоит из троса, натянутого вдоль заданной прямой, установленного на тросе желобчатого шупа, связывающего щуп с остовом машины параллелограммного механизма, и датчика угловых перемещений, установленного в шарнире, соединяющем короткий рычаг параллелограммного механизма с остовом машины.
Для определения поперечной координаты любой точки машины относительно заданной прямой в из шарниров параллелограммного механизма смонтирован дополнительный датчик угловых перемещений,
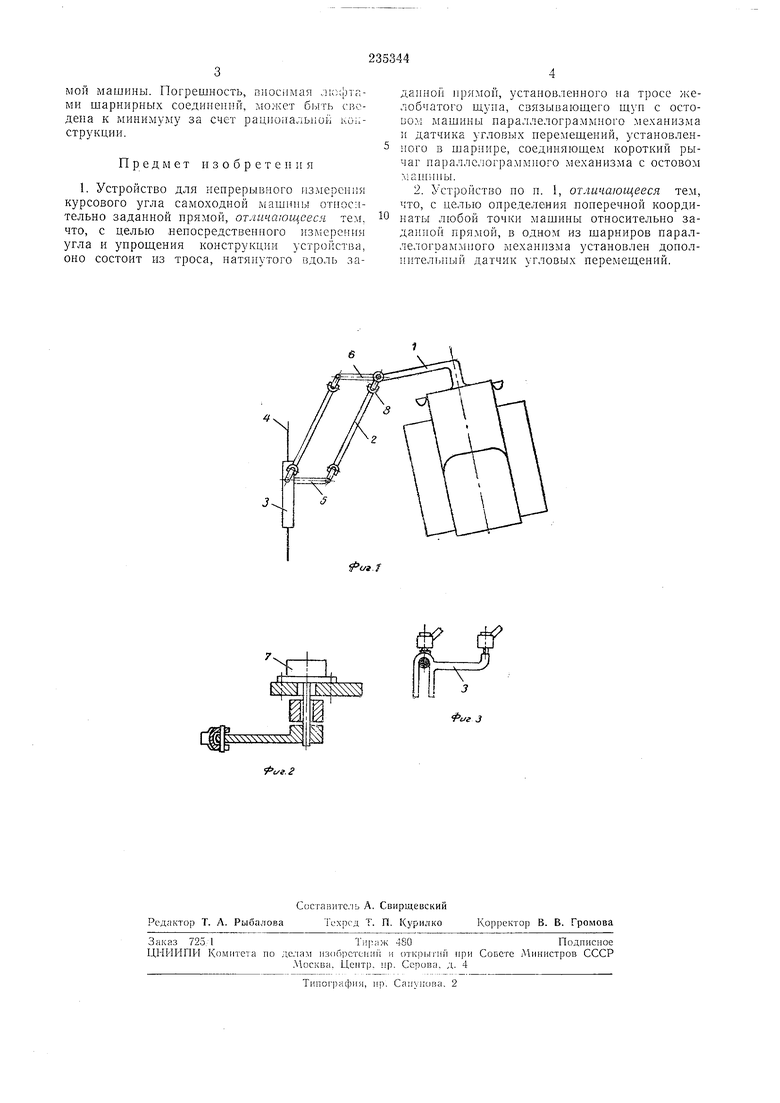
На фиг. 1 приведена принципиальная схема предложенного устройства; на фиг. 2 - желобчатый щуп; на фиг. 3 - датчик угловых перемещений.
Устройство содержит опорный брус /, устанавливаемый на раме испытуемой машины перпендикулярно ее продольной оси, параллелограммный механизм 2 и щуп 5. В случае применения троса щуп выполняют в виде перевернутого и открытого с концов желоба, перемещающегося по тросу 4. Один из коротких рычагов 5 параллелограммного механизма жестко соединяют со щупом перпендикулярно заданной осп.
Между опорным брусом рамы и другим коротким рычагом 6 образуется угол, равный углу между продольной осью машины и заданной осью (стороны углов взаимно перпендикулярны). Этот угол измеряется датчиком 7 угловых перемешений. Для компенсации неровностей рельефа длинные тяги параллелограммного механизма имеют шарниры 8. Установка еще одного датчика угловых
перемещений в любой шарнир параллелограммного механизма дает возможность определять и поперечную координату любой точки машины путем несложного расчета. Точность предлагаемого устройства не зависит от диапазона измеряемых отклонений, а также от размеров элементов устройства. Единственным ограничением является обеспечение необ.ходимой длины, рычагов параллеломой машины. Погрешность, пиосимая .лкхЬтами шарнирных соединений, может б1лть сведена к минимуму за счет рациопалыюй ко; струкции.
Предмет изобретения
1. Устройство для непрерывного измерения курсового угла еамоходной машины относительно заданной прямой, отличающееся тем. что, с целью неиосредственного измереии.ч угла и упрош;ения конструкции устройства, оно состоит цз троса, натянутого вдоль зал7,аннои иря.мои, установленного на тросе желобчатого щуиа, связываюидего шуи с остоDo.vi машины параллелограммного ме.ханизма II датчика угловых церемеш.ений, установлен;ioro в шарнире, соединяюшем короткий рычаг нараллелогра.ммного механизма с остовом маипшы.
2. Устройство но н. 1, отличающееся тем, что, с целью онределения понеречной координаты любой точки машины относительно заданной прямой, в одном из шарниров параллелограмлпюго механизма уетановлен донолпительлый датчик угловых перемещений.
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящее устройство режущего аппарата виноградоуборочной машины | 1982 |
|
SU1056951A2 |
| СПОСОБ РЕГУЛИРОВАНИЯ КУРСОВОГО ДВИЖЕНИЯ ТРУБОУКЛАДЧИКА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
RU2019496C1 |
| Датчик глубины копания рабочего органа дреноукладчика (его варианты) | 1981 |
|
SU1068580A1 |
| СПОСОБ ПРОДОЛЬНОЙ РАСПИЛОВКИ БРЕВЕН, УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ И КОМПЛЕКС ИЗМЕРИТЕЛЬНЫХ УСТРОЙСТВ ПО ЗАМЕРУ ПАРАМЕТРОВ БРЕВНА И ПИЛОМАТЕРИАЛОВ | 1993 |
|
RU2086407C1 |
| АРТИЛЛЕРИЙСКОЕ ОРУДИЕ | 2003 |
|
RU2230280C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ РАБОЧЕГО ОРГАНА МАШИНЫ | 2014 |
|
RU2566153C1 |
| Задатчик курсового положения рабочего органа землеройной машины | 1984 |
|
SU1162921A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ИСТИННОГО КУРСА С ПОМОЩЬЮ ДВУХКАНАЛЬНОГО ГИРОСКОПИЧЕСКОГО ДАТЧИКА УГЛОВОЙ СКОРОСТИ | 2000 |
|
RU2176780C1 |
| ГИРОГОРИЗОНТКОМПАС С ВРАЩЕНИЕМ ИНЕРЦИАЛЬНОГО ИЗМЕРИТЕЛЬНОГО БЛОКА | 2010 |
|
RU2436046C1 |
| Устройство измерения угла поворота летательного аппарата в горизонтальной плоскости | 2023 |
|
RU2805424C1 |
./
