Мзвестны устройства для перйдачи штучных грузов с конвейеров на перпендикулярно расположен}1ый к ним конвейер, содержание подающие приводные рольганги, .приемный рольганг, состоящий из двух рдм, одна из которых выполнена подъемно-опускной, с укреплеины,ми на них взаимно перпендиКулярными рядами роликСЗ, и механизм для поштучной подачи грузов с иодающих -приводных рольгангов на приемный рольганг.
Особенность предлагаемого устройства состоит в том, что подающие рольгаиги п подъемно-опускная рама приемного рольганга установлены на четырехзвенных шарнирных рычагах. Механизм для поштучно) подачи грузов выполнен в анде перемещающейся над рольгангами по направляющим кареткн, приводимой в движение силовым цилиндром и снабженной поднружиненными козырьками для грузов н копирами. Последние взаимодействуют с пальцем, щарнирно соединенным с телескопической тягой, связанной с четырехзвеннымн шарнирными рычагами подающего рольганга.
Кроме того, на выходе подающего рольганга смонтирован флажковый упор, который соединен посредством системы рычагов с фиксатором телескопической тяги, а на выходе приемного рольганга установлен конечный выключатель с реле времени для включения н выключения силового цилиндра каретки.
При таксм выполнении устройства позыИ1ается эффективность его работы.
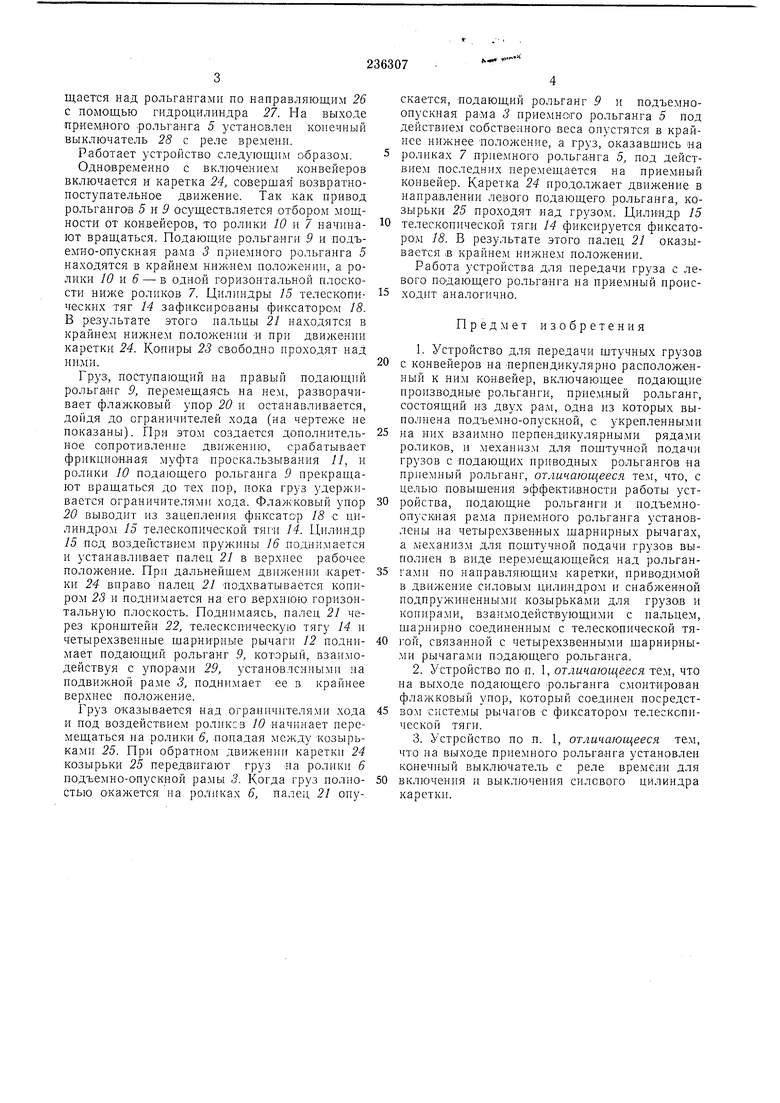
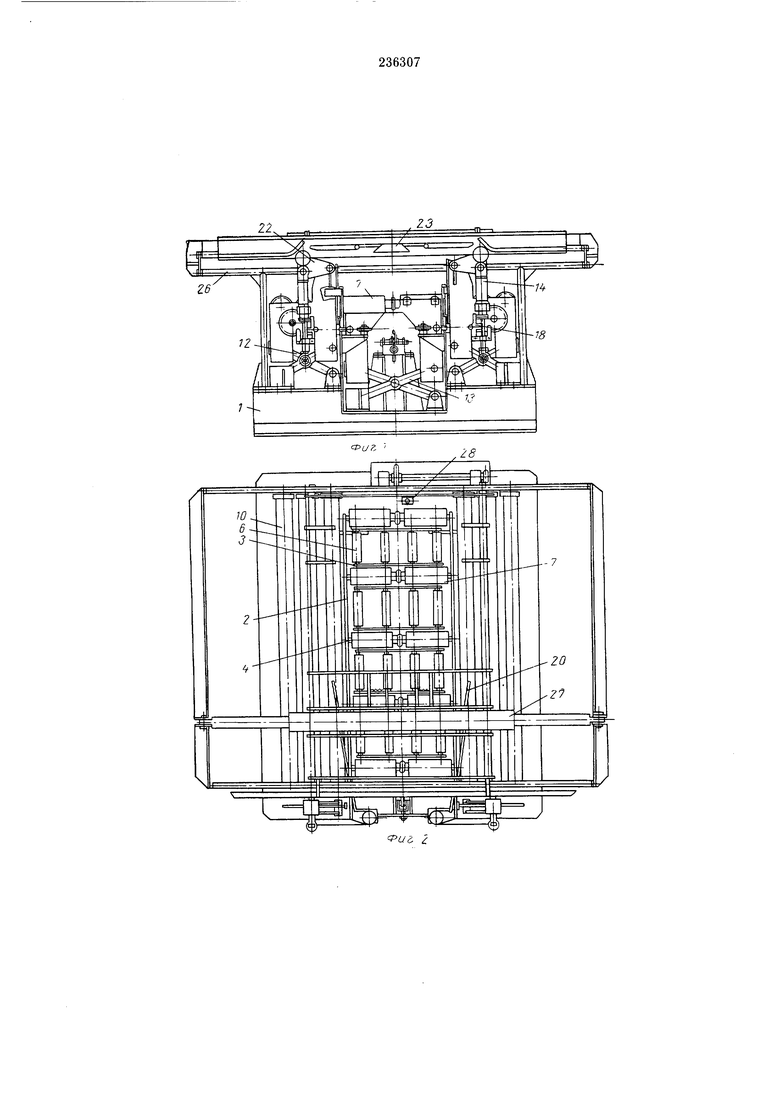
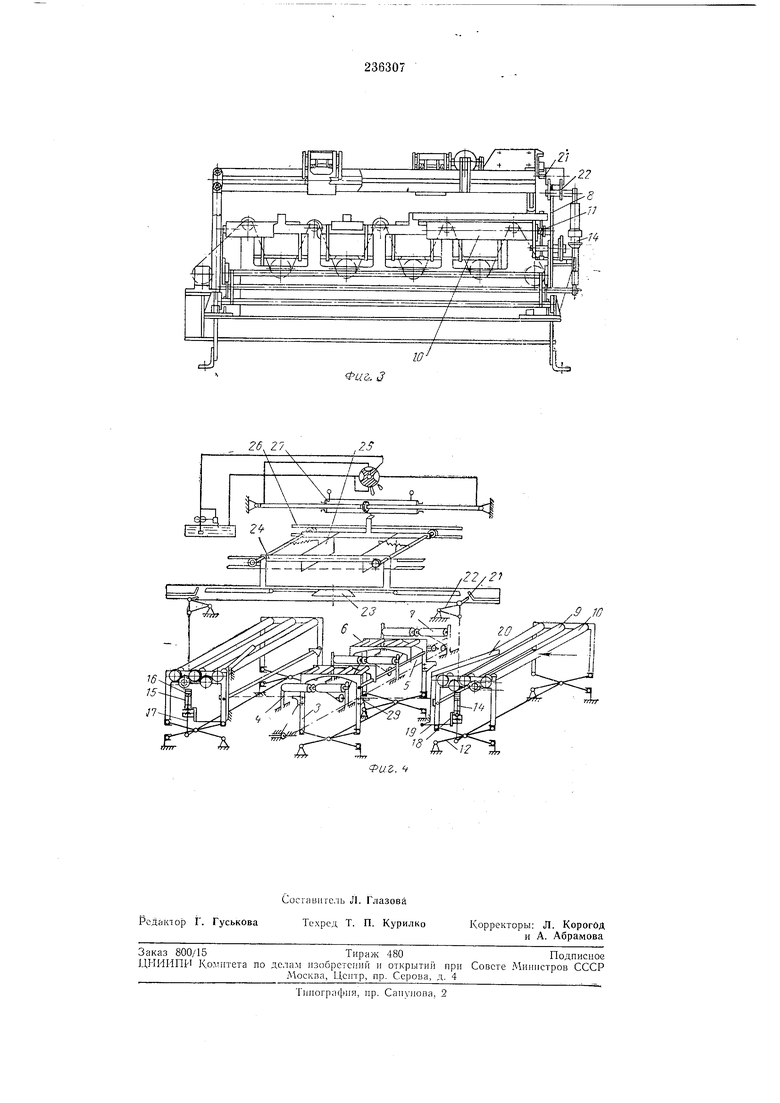
Па фиг. 1 схематически изображено предлагаемое устройство, вид спереди; на фиг. 2 -то же, впд сверху; на фиг. 3 - то же, внд сбоку; на фиг. 4 - кинематическая схема.
Па основании 1 устройства закреплены щеки 2 подъемно-опускной рамы 3 и неподвижная рама 4 приемного рольганга 5, с укрепленными на них взаимно перпендикулярными рядами роликов 6 п 7, а также рама 8 подающего приводного рольганга 9, .на которой смонтированы три ролика 10 с фрпкцноннымн муфтами проскальзывания 11. Подающие рольган5 гн 9 и подъемно-опускная .рама 3 приемного рольганга 5 установлены на четырехзвенных шарнирных рычагах 12 и 13. При этом четырехзвенные шарнирные рычаги 12 подающего рольганга 9 шарнирно соединены с телескопической тягой 14, состоящей нз цилиндра 15 со встроенной внутрь пружиной 16 н ннжнего щтока 17. Па последнем крепится подпружиненный фиксатор 18, соединенный посредством системы рычагов 19 с флажковым упором 20, расположенным на выходе подающего рольганга 5. Телесконическая тяга 14 в верхней части щарнирно соединена с пальцем 21, смонтированным на кронштейне 22, который взаимодействует с копирами 23, закрепленными на каретке 24, снабженной подпружиненными козырька.мн 25 для грузов. Каретка 24 перемещается над рольгангами по направляющим 26 с помощью гидроцилиндра 27. На выходе приемного рольганга 5 установлен конечный выключатель 28 с реле времени.
Работает устройство следующим Образом.
Одно1Временно с включением конвейеров включается и каретка 24, совершая возвратнопоступательное движение. Так как привод рольгангов 5 и 9 осуществляется отбором мощности от конвейеров, то ролики 10 и 7 начинают вращаться. Подающие рольганги 9 и подъемно-Опускная рама 3 приемного рольганга 5 находятся в крайнем нижнем положении, а ролики 10 н 6 - в одной горизонтальной плоскости ниже роликов 7. Цилиндры 75 телескопических тяг 14 зафиксированы фиксаторОМ 18. В результате этого пальцы 21 находятся в крайнем нижнем положении « при движении каретки 24. Копиры 23 свободно проходят над ни.ми.
Груз, поступающий на правый подающий рольганг 9, перемещаясь на нем, разворачивает флаж,ковый упор 20 и останавливается, дойдя до ограничителей хода (на чертеже не показаны). При этом создается дополнительное сопротивление движению, срабатывает фрикционная муфта проскальзывания 11, и ролики 10 подающего рольганга 9 прекращают вращаться до тех иор, пока груз удерживается ограничителями хода. Флажковый упор 20 выводит из зацепления фиксатор 18 с цилиндром 15 телескопической тягИ 14. Цилиндр 15 нод воздействием пружины 16 поднимается и устанавливает палец 21 в верхнее рабочее положение. При дальнейшем движении 1кареткц 24 вправо палец 21 подхватывается копиром 23 и поднимается на его верхнюю горизонтальную плоскость. Поднимаясь, палец 21 через кронштейн 22, телескопическую тягу 14 и четырехзвениые шарнирные рычаги 12 поднимает подаЕОщий рольганг 9, который, взаимодействуя с упора 29, установленными на подвижной раме 3, поднимает ее в крайнее верхнее положение.
Груз оказывается над ограничителями хода и под воздействием роликсв 10 начинает иеремещаться па ролики 6, .попадая между козырька.ми 25. При обратном движении каретки 24 козырьки 25 передвигают груз на ролики 6 подъемно-опускной рамы 3. Когда груз полностью ОКажется на роликах 6, палеи, 21 опускается, подающий рольганг 9 и подъемноопускная рама 3 приемного рольганга 5 под действием собственного веса опустятся в крайнее нижнее положение, а груз, оказавшись на роликах 7 приемного рольганга 5, нод действием последних перемещается на приемный конвейер. Каретка 24 продолжает движение в направлении левого подающего рольганга, козырьки 25 проходят над грузом. Цилиндр 15
телескопической тяги 14 фиксируется фиксатором 18. В результате этого палец 21 оказывается ,в крайнем нижнем положении.
Работа устройства для иередачи груза с левого подающего рольганга на приемный нроисходит аналогично.
Предмет изобретения
1.Устройство для передачи штучных грузов с конвейеров на перпендикулярно расположенный к ним конвейер, включающее подающие производные рольгаиги, прпе.мный рольганг, состоящий из двух рам, одна из которых выполнена подъемно-опускной, с укрепленными
на них взаимно иерпендикулярными рядами роликов, и механизм для поштучной подачи грузов с подающих приводных рольгангов на приемный рольганг, от.гичающееся тем, что, с целью повышения эффективности работы устройства, подающие рольганги и подъемноопускная рама приемного рольганга установлены на четырехзвенных щарнирных рычагах, а 1механизм для поштучной подачи грузов выполнен в виде перемещающейся над рольгангами но направляющим каретки, приводимой в движение силовым цилиндром и снабженной подпружиненными козырьками для грузов и копирами, взаимодействующими с пальцем, шарнирно соединенным с телескопической тягой, связанной с четырехзвенными шарнирными рычагами подающего рольганга.
2.Устройство по п. 1, отличающееся тем, что па выходе подающего рольганга смонтирован флажковый упор, который соединен посредством системы рычагов с фиксатором телескспической тяги.
3.Устройство по п. 1, отличающееся тем, что на выходе приемного рольганга установлен конечный выключатель с реле времени для
включения и выключения силового цилиндра каретки.
ФиЪ:. 2
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматическая линия для производства керамических изделий | 1986 |
|
SU1369898A1 |
| УСТАНОВКА ДЛЯ УКЛАДКИ ШТУЧНЫХ ИЗДЕЛИЙ В КАРТОННЫЕ ЯЩИКИ | 1991 |
|
RU2005678C1 |
| Устройство для укладски штучных грузов | 1971 |
|
SU358920A1 |
| Устройство для пакетирования длинномерных изделий | 1975 |
|
SU611836A1 |
| Подъемно-опускная секция рольганга | 1983 |
|
SU1113347A1 |
| УСТРОЙСТВО для ПЕРЕДАЧИ ШТУЧНЫХ ГРУЗОВ С РЯДА | 1966 |
|
SU188897A1 |
| ПАКЕТОФОРМИРУЮЩАЯ МАШИНА | 1973 |
|
SU406787A1 |
| УСТРОЙСТВО ДЛЯ ПОШТУЧНОЙ ВЫДАЧИ ИЗДЕЛИЙ ИЗ СТОПЫ | 1990 |
|
RU2006436C1 |
| Подъемно-перегрузочное устройство для штучных грузов | 1981 |
|
SU988716A1 |
| Устройство для перегрузки цилиндрических грузов | 1979 |
|
SU867792A1 |
|
3 JO
