Известные способы улравления шаговым двигателем по шести- и восьмитактиой схеме с использованием датчика положения ротора не обеспечивают эффектив-иого тормол ения двигателя, работаюш:его со скоростью, превышаюш.ей скорость приемистости, что ограничивает быстродействие и вызывает выбег ротора.
Для повышения быстродействия и устранения выбега ротора по сигналу приближения окончания отработки перемеш;ения вводят задержку подачи на коммутатор импульсов датчика положения на время, равное отработке трех шагов.
С целью исключения иовторного разбега ротора после торможения, при достижении двигателем определенной скорости ниже скорости приемистости, коммутатор отключают от датчика положения и подключают к независимому генератору, вырабатываюгцему импульсы с частотой, меньшей частоты п 2иемистости.
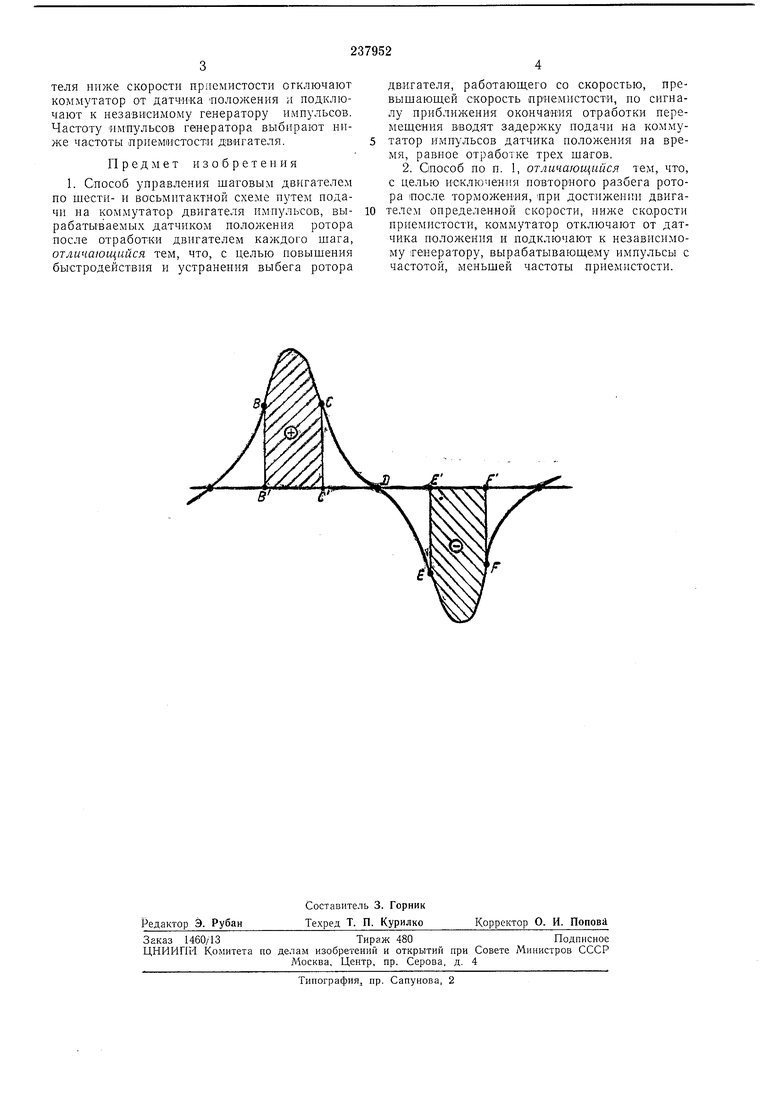
На чертеже I приведена характеристика статического синхронпзируюш,его момента шагового двигателя.
Точка, изображающая положение ротора двигателя, работаюш его со скоростью, превышаюш ей скорость приемистости, перемещается по кривой статического синхронизирующего момента в интервале В-С. Обработка каждого шага начинается в точке В и заканчивается в точке С. При этом двигатель развивает движущий момент, и работа, совершаемая за шаг, положительна и пропорииональиа заштрихованной области ВССВ.
Пропуск импульса, вырабатывае.мого датчиком в точке С, иереводит двигатель на интервал С-D.
Соответственно иропуск импульса, выработаипого датчиком в точке D, обеспечивает работу двигателя на интервале D-Е и т. д. Исключение трех импульсов приводит к тому, что точка, изображающая положение ротора, перемещается ио кривой на участке Е-F, причем начало шага соответствует точке F, а конец - Е.
Работа (область EFFE}, совершаемая за шаг, на этом участке отрицательна и максимальна, что обеспечивает наиболее быстрое торможеиие. Ротор щагового двигателя удерживается на интервале Е-F до полного останова.
Описанный процесс тормол-:ення имеет место в случае, если начальная скорость двигателя больше скорости приемистост)), а тормозной путь превышает три шага. Когда тормозной путь .меньше трех шагов, возможен повторный разбег двигателя или неполная отработка шформаш11П. Для устранения этого недостатка после уменьшения скорости двигателя ниже скорости приемистости отключают коммутатор от датчика положения и подключают к независимому генератору импульсов. Частоту импульсов генератора выбирают ниже частоты приемистости двигателя.
Предмет изобретения
1. Способ управления шаговым двигателем по шести- и восьмитактной схеме путем подачи иа коммутатор двигателя имиульсоо, вырабатываемых датчиком положения ротора после отработки двигателем каждого шага, отличающийся тем, что, с целью повышения быстродействия и устранения выбега ротора
двигателя, работающего со скоростью, превышающей скорость приемистости, ио сигналу приближения окончания отработки перемещения В1ВОДЯТ задержку нодачи на коммутатор импульсов датчика положения и а время, равное отработке трех шагов.
2. Способ по п. 1, отличающийся тем, что, с целью исключения иовторного разбега ротора после торможения, при достижении двигателсм определенной скорости, ниже скорости приемистости, коммутатор отключают от датчика иололсення и подключают к независимому генератору, вь paбaтывaющeiмy импульсы с частотой, меньшей частоты приемистости.
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система | 1979 |
|
SU842705A1 |
| Способ торможения шагового электродвигателя и устройство для его осуществления | 1982 |
|
SU1032585A1 |
| Устройство для позиционного управления шаговым двигателем | 1979 |
|
SU924816A1 |
| Устройство для управления шаговым двигателем | 1983 |
|
SU1108600A1 |
| Устройство для управления шаговым двигателем | 1986 |
|
SU1334350A1 |
| Шаговый электропривод | 1986 |
|
SU1372585A1 |
| Устройство для управления шаговым двигателем | 1989 |
|
SU1721783A1 |
| Устройство для управления шаговым двигателем | 1987 |
|
SU1456934A1 |
| Система позиционного управления | 1977 |
|
SU684505A1 |
| Устройство для позиционного управления шаговым двигателем | 1973 |
|
SU468345A1 |
