Известно устройство для управления паровоздушным ковочным молотом, содерлсащее станину с расположенным на ней рабочим цилиндром, соединенным с распределительным золотником, связанным через привод с рукояткой управления.
Описываемое устройство для управления паровоздушным ковочным молотом отличается от известного тем, что оно снабжено установленным на станине гидра|Влическим вибратором, состояш,им из связанных между собой золотника, гидравлического цилиндра с двусторонним штоком и толкателя переменной длины, расположенного параллельно цилиндру и выполненного в виде двух соосно установленных ходовых винтов, соединенных своими концами с одной стороны посредством муфты и взаимодействуюш;им другими концами с соответствуюш.ими планками, служащи.ми для переключения золотника и закрепленными на конце штока цилиндра, связанного другим концом с распределительным золотником. На станине смонтированы два гидроусилителя, один из которых кинематически связан с муфтой и рукояткой управления, а другой также кинематически - с рукояткой управления и гидравлически - с цилиндром вибратора.
изводительность, улучшает качество поковок и расширяет диапазон частоты ударов.
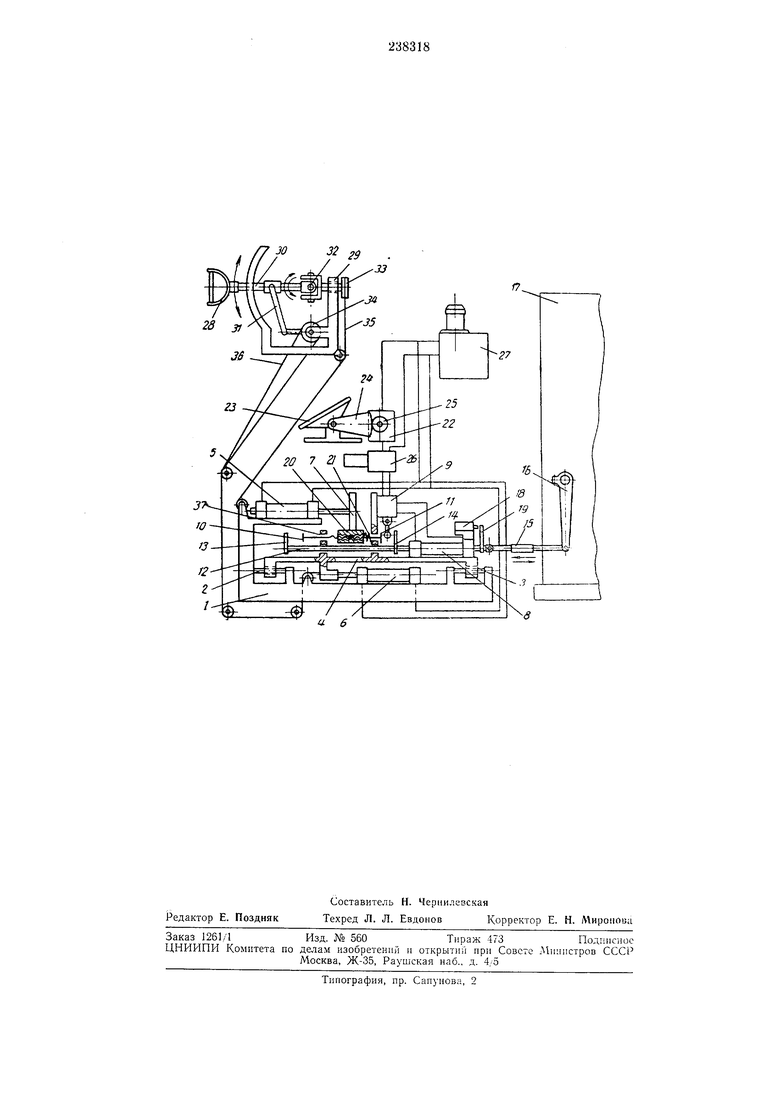
На чертеже изображена принципиальная схема описываемого устройства.
На станине / закреплены направляюш,ие скалки 2 и (по две с каждой стороны), служашие опорами для платформы 4, и следящие гидроусилители 5 и 6 с жесткой обратной связью, являющиеся соответственно приводами шестерни 7 ,и платформы 4. На платформе установлен гидровибратор, содержащий цилиндр 8, золотник 9 реверса и толкатель переменной длины, состоящий из двух винтов 10 и //. На одном конце двустороннего штока
12 цилиндра установлены планки 13 и 14, переключающие золотник, а другой конец штока шарнирно связан тягой 15 и рычаго.м 16 с золотником управления молота 17. На цилиндре 8 вибратора установлен датчик крайнего положения привода золотника молота, состояший из путевого выключателя 18, управляемого толкателем 19. Одни концы винтов 10 а 11 соединены муфтой 20, несущей на себе зубчатый венец, а другие взаимодействуют с планка.ми 13 и 14. Пружина 21 фиксирует положение открытого торца винта // по отношению к своей направляющей. Привод гидродросселя 22 связан с педалью 23 через зубчатый сектор 24 и щестерню 25. В гидросистему
ный золотник 26 и гидростанция 27. Рукоятка 28 управления амплитудой качания распределительного золотника и смещением средней точки качания золотника укреплена на раме 29, и через шток 30, тягу 31 и кардан 32 связана с барабанами 33 и 34, которые, в свою очередь, через тросовые тяги 35 и 36 связаны соответственно с гидроусилителями 5 и 6.
В полуавтоматическом режиме механизм работает следующим образом.
При включенной гидростанции 27 и открытом золотнике 26 шток 12 цилиндра 8 сообщает тяге 15 возвратно-поступательное движение, которое передается через рычаг 16 золотнику управления движением бойка молота 17. Ход поршня цилиндра 8 р.еверсируется золотником 9, переключаемым в одну сторону планкой 14, а в другую сторону - планкой 13 через винт 10, муфту 20 и винт //. Амплитуда хода штока цилиндра изменяется оператором путем поворота рукоятки 28 относительно своей оси. Это движение передается через кардан 32, барабан 33 и тросовую тягу 35 следящему гидроусилителю 5, который посредством кинематической передачи вращает шестерню 7 и муфту 20. Благодаря наличию в муфте внутренней левой ,и правой резьб, а также ограничению поворота винтов 10 н 11 шпонкой 37 вращение муфты вызывает из.менение расстояния между открытыми торцами винтов, а следовательно, и изменение пути планки 13 до со.прикосновения с винтом 10. Смещение средней линии и нижней границы опускания бойка молота происходит путем смещения самой платформы 4 и по направляющим скалкам 2 и 3 от следящего гидроусилителя 6. Гидроусилителем 6 управляет оператор, поворачивая рукоятку 28 в вертикальной плоскости. Это движение .передается через тягу 31, барабан 34 и тросовую тягу 36. Частоту колебаний цилиндра вибратора оператор регулирует педалью 23, обеспечивая изменение количества подаваемого к цилиндру вибратора масла. После подачи команды на останов цилиндра путевой выключатель 18 останавливает боек молота в верхнем положении.
При переходе на ручной режим управления молотом оператор перекрывает электромагнитным золотником 26 подводящую и отводящую магистрали, питающие цилиндр вибратора. Таким образом снсте.ма цилиндр-поршень
становится жесткой. Управление молотом сводится к управлению движения платформы 4 от рукоятки.
Предмет изобретения
, Устройство для управления паровоздушным ковочным молотом, содержащее станину с расположенным на ней рабочим цилиндром, соединенным с распределительным золотником, связанным через привод с рукояткой управления, отличающееся тем, что, с целью повышения производительности, улучшения качества поковок и расширения диапазона частот ударов, оно снабжено установленным на
станине гидравлическим вибратором, состоящим из связанных между собой золотника, гидравлического цилиндра с двусторонним ЩТОКО.М и толкателя переменной длины, расположенного параллельно цилиндру и вынолненного в виде двух соосно установленных ходовых винтов, соединенных своими концами с одной стороны посредством муфты и взаимодействующих другими концами с соответствующими планками, служащими для переключения золотника и закрепленными на конце штока цилиндра, связанного другим концом с распределительным золотником, при этом на станине смонтированы два гидроусилителя, один из которых кинематически связан с муфтой и
рукояткой управления, а другой также кинематически - с рукояткой управления и гидравлически - с цилиндром вибратора.
J- 6
| название | год | авторы | номер документа |
|---|---|---|---|
| МЕХАНИЗМ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ПАРОВОЗДУШНЫМ КОВОЧНЫМ МОЛОТОМ | 1969 |
|
SU244846A1 |
| ПАРОВОЗДУШНЫЙ КОВОЧНЫЙ молот | 1968 |
|
SU206981A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ КОВОЧНЫМ ЛЮЛОТОЛ1 | 1972 |
|
SU414036A1 |
| СИСТЕМА УПРАВЛЕНИЯ ГИДРАВЛИЧЕСКИМ КОВОЧНЫМПРЕССОМ | 1967 |
|
SU200437A1 |
| Система автоматического управления ковочным прессом | 1975 |
|
SU610678A1 |
| Станок для обработки концов труб | 1988 |
|
SU1576242A1 |
| Станок для доводки плоских поверхностей | 1985 |
|
SU1284803A1 |
| СИСТЕМА УПРАВЛЕНИЯ ГИДРАВЛИЧЕСКИМ КОВОЧНЫМПРЕССОМ | 1969 |
|
SU251367A1 |
| УСТРОЙСТВО ДИСТАНЦИОННО-ПРОГРАММНОГО УПРАВЛЕНИЯ ПАРОВОЗДУШНЫМИ МОЛОТАМИ | 1970 |
|
SU276706A1 |
| Бесшаботный молот | 1983 |
|
SU1076174A1 |