Известны системы управления ковочными прессами с применением кривошипно-шатунного механизма, приводимого электродвигателем, а также гидромеханическая схема управления ковочным прессом, в которой сервомотор клапанного распределителя соединен посредством двуплечего рычага одновременно с двумя источниками упра)вления: с рукояткой ручного управления и механизмом автоматической работы.
Предлагаемая система управления отличается от известных тем, что в ней механизм автоматической работы, представляюпдий собой кривошипно-кулисный механизм, сблокирован с дистанционно управляемым измерителем, работающим В режиме конечного выключателя.
Для обеспечения двух режимов ковки кривошипно-кулисный механизм установлен в направляющих и снабжен приводом.
С целью повыщения надежности системы в работе в нее встроен блокирующий датчик, электрически связанный с электродвигателем механизма автоматической работы.
На чертеже схематически изображена предлагаемая система.
Первой особенностью предлагаемой системы является блокировка измерителя с кривошипно-кулисным механизмом, дающая возможность получения установленного измерителем размера.
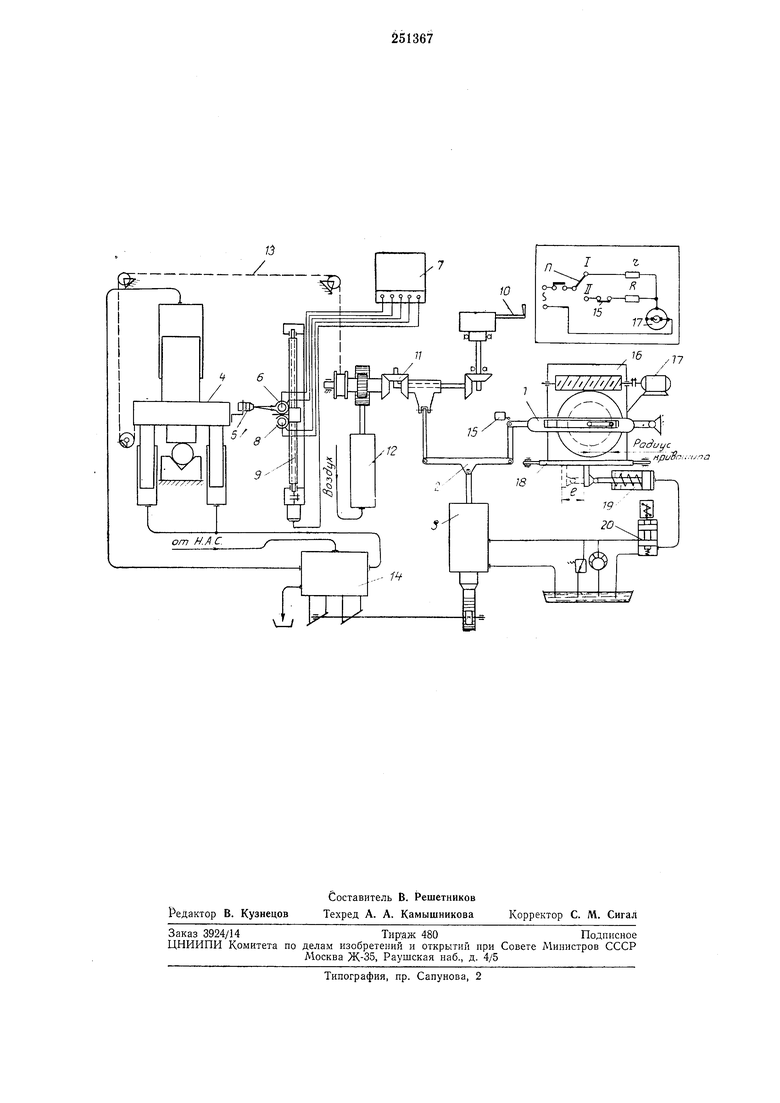
Это происходит потому, что кривошипный механизм через кулису / перемещает двуплечий рычаг 2, который соединен с золотником управления следящего сервомотора 3, что
обеспечивает подвод бойка к уровню ковки со скоростью, равной 0.
В качестве измерителя может быть использовано устройство СШТ-11. На ноперечине пресса 4 закреплен источник излучения 5, который лри достижении размера облзчает верхний датчик 6. Сигнал от датчика поступает в электронный блок 7, где усиливается и используется для сигнализации о достижении размера локовки. Каретка с датчиками 6 и 8
устанавливается дистанционно на требуемую высоту вращением винта 9.
Рукоятка 10 управления, дифференциал 11, цилиндр 12 натяжного устройства, гибкая обратная связь 13, двуплечий рычаг 2, следящий
сервомотор 3 и распределитель 14 выполнены аналогично схеме, описанной в авт. св. № 176802 от 13. IX 1963 г.
Второй особенностью системы является наличие электромеханического устройства, состоящего из конечного выключателя 15, на который в крайнем положении нажимает кулиса /, самотормозящейся передачи 16 и двух сопротивлений г и R, позволяющего концу двуплечего рычага 2 при выключении автоматичеПри включении механизма автоматической работы пресса в цепь статора электродвигателя 17 включается малое сопротивление г, которое обеспечивает заданное количество ходов подвижной поперечины пресса. Для выключения автоматической работы оператор переводит переключатель Я из полол ения / в положение //, в результате чего включается большое сопротивление R.
Число оборотов электродвигателя 17 понижается и благодаря совокупному надичию самотормозящейся 1пе.редачи 16 и конечному выключателю /5 кулиса / .при выключении электродвигателя 17 ъсегда занимает строго фиксированное Первоначальное положение, что освобождает оператора от новой установки рукоятки управления при переходе с автоматического на ручной реж,им работы.
Третьей особенностью системы является ступенчатое изменение величины амплитуды ,ния конца двуплечего рычага 2 путем перемещения кривошипного механизма по направляющрм;/8: кулисы С помощью гидроцилиндр.а /5. одностдроянего действия на необходимую величину.
Увеличение амплитуды качания кулисы достигается за счет .пружины цилиндра 19,а уменьшение - за счет золотника 20, подающего масло под высоким давлением в цилиндр 19.
Четвертой особенностью системы, отличающей ее от существующих, является .наличие
блокирующего устройства против случайного перебега уровня ковки.
Предмет изобретения
1. Система управления гидравлическим ковочным прессом, содержащая механизм автоматической работы и сервомотор клапанного распределителя, соединенный с помощью двуплечего рычага с рукояткой управления прессом и с механизмом автоматической работы, отличающаяся тем, что, с целью повыщения производительности и качества поковок, механизм автоматической работы вьшолнен в виде кривошипно-кулисного механизма, сблокиро1ванного с автоматическим измерителем поковок, установленным на поперечине пресса, и снабженного самотормозящимся редуктором, кинематически связанным с кривошипом, а также электромеханическим устройством, выполнеи.иым в виде конечного выключателя, контактирующего с кулисой, и сопротивлений, включенных в щепь электродвигателя механизма автоматической работы.
2.Система по п. 1, отличающаяся тем, что, с целью получения двух режимов ковки, кри1вощипно-кулисный механизм установлен в направляющих и снабжен приводом.
3.Система по л. 1, отличающаяся тем, что, с целью повыщения надежности в работе,
в нее встроен блокирующий датчик, электрически связанный с электродвигателем механизма автоматической работы.
нриоои-u.in
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ ГИДРАВЛИЧЕСКИМ КОВОЧНЫМПРЕССОМ | 1967 |
|
SU200437A1 |
| СИСТЕМА УПРАВЛЕНИЯ ГИДРАВЛИЧЕСКИМ КОВОЧНЫМ ПРЕССОМ | 1972 |
|
SU323295A1 |
| МЕХАНИЗМ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ПАРОВОЗДУШНЫМ КОВОЧНЫМ МОЛОТОМ | 1969 |
|
SU244846A1 |
| СИСТЕМА УПРАВЛЕНИЯ ГИДРАВЛИЧЕСКИМ КОВОЧНЫМ ПРЕССОМ | 1973 |
|
SU408827A1 |
| Система автоматического управления гидравлическим прессом | 1974 |
|
SU720901A1 |
| СИСТЕМА УПРАВЛЕНИЯ ГИДРАВЛИЧЕСКИМ КОВОЧНЫМПРЕССОМ | 1970 |
|
SU278417A1 |
| Автоматический выключатель давления к гидравлическим ковочным прессам | 1935 |
|
SU49744A1 |
| Ковочный комплекс | 1991 |
|
SU1787639A1 |
| Радиально-ковочная машина | 1987 |
|
SU1412871A1 |
| Устройство для автоматического управления ковочными молотами | 1955 |
|
SU103286A1 |