Известен прибор для автоматического контроля перемещения поковки при свободной «овке, .смонтированный на манипуляторе, передвигающемся по рельсовому пути, и содержащий суммирующее устройство, электрический переключатель и световое табло.
Предложенный прибор отличается от известного тем, что Суммирующее, устройство выполнено в виде щестеренчатого дифференциала, одна щестерня которого посредством зубчатого сектора и пальца связана с хоботом манипулятора, а другая посредством цепной передачи - с роликом, расположенным на рельсовом пути. Водило сателлитов дифференциала кинематически -связано с электрическим переключателем. Прибор регистрирует величину осевого перемещения поковки относительно бойков.
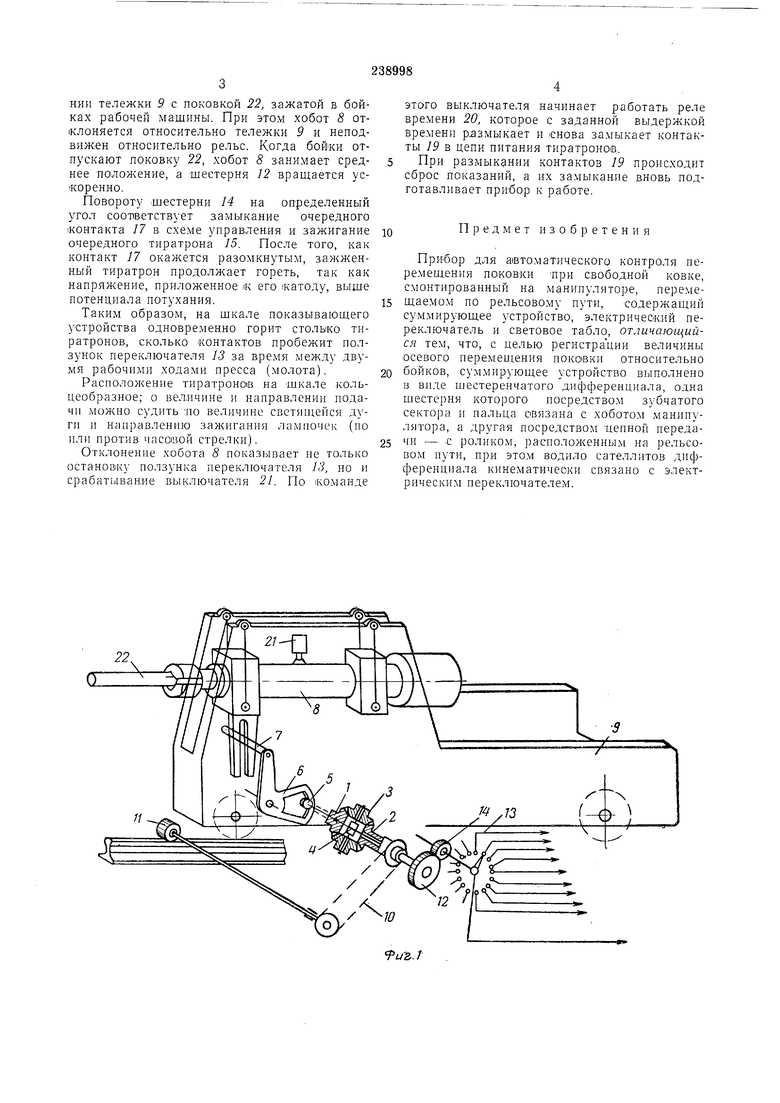
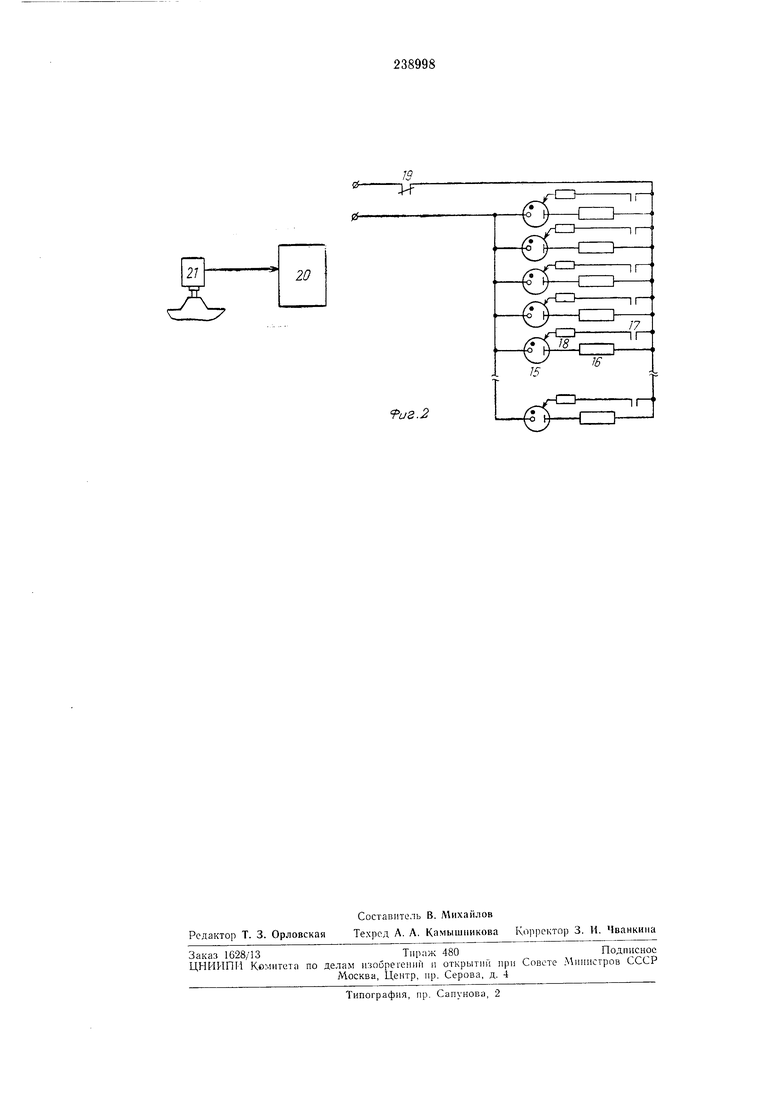
На фиг. 1 представлена кинематическая схема прибора; на фиг. 2 - его электрическая схема.
Суммирующее устройство прибора содержит щестеренчатый дифференциал, состоящий из конических щестерен / и 2 и сателлитов 3, расположенных на крестовине водила 4.
но тележки 9 манипулятора, -который смонтирован в боковой стенке дифференциала.
Коническая щестерня 2 приводится во вращение через цепь W от ролика 11, перекатыБающегося по рельсовому пути npji осевом перемещении тележки манипулятора. На переднем конце водила 4 закреплена щестерня 12, вращающая переключатель 13 через сменную щестерню М.
Показываюил.ее устройство прибора располагается на пульте управленпя и состоит из тиратронов 15 типа МТХ-90, включенных с цепь постоянного тока через сопротивления 16 и контакты 17 переключателя 13 (по чпслу тиратронов), подающие положительное смещение на зажигающую сетку тиратронов через -сопротивления 18. Контакты 19 реле времени 20 производят сброс показаний (тущат тиратроны) после каждого размыкания
выключателя 21.
Прибор работает следующим образом. Шестерня 1 поворачивается при осевом сдвиге хобота 8 манипулятора относительно тележки 9, щестерня 2 - при перемещении
тележки относительно рельс. Шестерня /2 поворачивается на угол, определяемый алгебраической суммой обоих движений.
НИН тележки 9 с поковкой 22, зажатой в бойках рабочей машины. При этом хобот 8 отклоняется относительно тележки 9 и неподвижен относительно рельс. Когда бойки отпускают поковку 22, хобот 8 занимает среднее положение, а шестерня 12 вращается ускоренно.
Повороту шестерни М на определенный угол соответствует замыкание очередного контакта /7 в схеме управления и зажигание очередного тиратрона 15. После того, как контакт 7 окажется разомкнутым, зажженный тиратрон продолжает гореть, так как напряжение, приложенное к его катоду, выше потенциала потухания.
Таким образо1М, на шкале показывающего устройства одновременно горит столько тиратронов, сколько контактов пробежит ползунок переключателя 13 за время между двумя рабочими ходами пресса (молота).
Расположение тиратроно1В на шкале кольцеобразное; о величине и направлении подачи можно судить НО величине светяП1ейся дуги и направлению зажигания лампочек (по или против часоиой стрелки).
Отклонение хобота 8 показывает не только остановку ползунка переключателя 13, но и срабатывание выключателя 21. По команде
этого выключателя начинает работать реле времени 20, которое с заданной выдержкой времени размыкает и снова замыкает контакты 19 в цепи питания тиратронов.
При размыкании контактов 19 происходит сброс показаний, а их замыкание вновь подготавливает прибор к работе.
Предмет изобретения
Прибор для айто.матического контроля иеремещения поковки При свободной ковке, с.монтированный на манииуляторе, пере.мещаемом по рельсовому пути, содержащий суммирующее устройство, электрический переключатель и световое табло, отличающийся тем, что, с целью регистрации величины осевого перемещ,ения иоко1вки относительно бойков, сум.мирующее устройство выполнено в виде шестеренчатого дифференциала, одна шестерня которого посредством зубчатого сектора и иальца связана с хоботом манипулятора, а другая посредством цепной передачи - с роликом, расположенным на рельсовом иути, при этом водило сателлитов дифференциала кинематически связано с электрическим переключателем.
| название | год | авторы | номер документа |
|---|---|---|---|
| Ковочный манипулятор | 1983 |
|
SU1156795A1 |
| КОВОЧНЫЙ МАНИПУЛЯТОР | 1990 |
|
RU2010661C1 |
| Устройство для промывки внутренних поверхностей грузовых вагонов | 1971 |
|
SU476200A1 |
| Устройство осевого перемещения хобота ковочного манипулятора | 1976 |
|
SU1038051A1 |
| УСТРОЙСТВО для ПОДЪЕМА ХОБОТА КУЗНЕЧНОГО МАНИПУЛЯТОРА | 1972 |
|
SU351626A1 |
| БЛОК-СХЕМА УПРАВЛЕНИЯ ПЕРЕМЕЩЕНИЕМ КОВОЧНОГО | 1973 |
|
SU369969A1 |
| А УПРАВЛЕНИЯ ГИДРАВЛИЧЕСКИМ КОВОЧНЫМПРЕССОМ | 1967 |
|
SU201036A1 |
| Способ управления ковочным манипулятором | 1978 |
|
SU724267A1 |
| РЕЛЬСОВО-БЕЗРЕЛЬСОВОЕ ТРАНСПОРТНОЕ УСТРОЙСТВО С КОМБИНИРОВАННОЙ ЭНЕРГОУСТАНОВКОЙ | 2006 |
|
RU2332310C2 |
| КОВОЧНЫЙ НАПОЛЬНЫЙ МАНИПУЛЯТОР | 1973 |
|
SU407622A1 |
.2
