системой и двумя парами шарнирных рычагов 27. Один шарнир 29 каждого рычага 27 размещен в пазу 31 с возможностью перемещения. Причем Р 25 имеет в зоне паза 31 установочную линейку 41 и подвижно установленные вдоль нее с возможностью фиксации и взаимодействия с шарниром 29 одной из Р 25 датчики 42, отрегулированные на линейке 41 на необходимую величину вертикального перемещения. При включении привода 30 через тросо-блочную систему и рычаги 27 опускается Р 26 до
взаимодействия шарнира 29 с датчиком 42, После опускания ГП 3 последним захватывается изделие и ГП 3 поднимается механизмом 2 подъема. В верхнем положении изделие поворачивается в ГП 3 и тележка 1 перемещается по направляющим 6. Одновременное перемещением тележки 1 включается устройство 8, и ГП 3 с изделием вращается вокруг вертикальной оси на заданный угол. После остановки тележки 1 происходит опускание изделия. 1 з.п.ф-лы, 7 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Склад для хранения затаренных грузов (его варианты) | 1984 |
|
SU1217729A1 |
| Транспортная установка для передачи изделий с одного конвейера на другой | 1981 |
|
SU1006345A1 |
| Подъемно-опускное устройство для испытаний подводного аппарата | 1983 |
|
SU1119920A1 |
| Грузозахватное устройство | 1986 |
|
SU1418268A1 |
| Автоматическая транспортная установка для передачи изделий с одного конвейера на другой | 1974 |
|
SU557014A1 |
| Грузозахватное устройство | 1986 |
|
SU1341142A1 |
| ТРАВЕРСА ПЕРЕГРУЗОЧНАЯ ЗАХВАТНАЯ ИЗДЕЛИЯ | 2012 |
|
RU2513367C1 |
| КРАН-МАНИПУЛЯТОР | 2004 |
|
RU2263589C1 |
| Грузоподъемное устройство | 1974 |
|
SU536114A1 |
| ТРАВЕРСА, МЕХАНИЗМ ВЫРАВНИВАНИЯ БАЛАНСИРОВКИ НЕСУЩЕЙ БАЛКИ ТРАВЕРСЫ, ТАКЕЛАЖНОЕ УСТРОЙСТВО НЕСУЩЕЙ БАЛКИ ТРАВЕРСЫ, ГРУЗОФИКСИРУЮЩЕЕ СРЕДСТВО ТАКЕЛАЖНОГО УСТРОЙСТВА НЕСУЩЕЙ БАЛКИ ТРАВЕРСЫ, ОПОРНЫЙ СТАПЕЛЬ НЕСУЩЕЙ БАЛКИ ТРАВЕРСЫ, СПОСОБ РАВНОВЕСНОЙ НАСТРОЙКИ ТРАВЕРСЫ НА ОПОРНЫХ СТАПЕЛЯХ, СПОСОБ ПЕРЕМЕЩЕНИЯ ТРАВЕРСОЙ ИЗДЕЛИЯ | 2008 |
|
RU2376237C1 |
Изобретение относится к машиностроению. Цель-обеспечение возможности регулирования грузоподъемности и вертикального хода и уменьшение габаритов. Устройство включает направляющие 6, подвижно установленную на них грузовую тележку 1 с подъемно-опускным грузовым захватным приспособлением (ГП) 3 с поворотным устройством 8 вокруг вертикальной оси и с механизмом 2 подъема, выполненным с приводом 30. Механизм 2 подъема выполнен в виде двух рам (Р) 25,26 с горизонтальными пазами 31, при этом Р 25 соединена с ГП 3, а Р 26 - с устройством 8. Р 25,26 связаны между собой тросо-блочной
Изобретение относится к машиностроению, а именно к автоматическим транспортным устройствам, используемым для транспортирования изделий между рабочими позициями гибких производственных систем сварочного производства.
В настоящее время в существующих линиях применяются различные типы подъемно-перегрузочных устройств для транспортирования изделий между позициями, но они не позволяют регулировать грузоподъемность и вертикальный ход, имеют большие габариты.
Поэтому задачей изобретения является создание компактного подъемно-перегрузочного устройства, о беспечивающего возможностьрегулированиягрузоподъемности и вертикального хода.
Известен автомат для садки кирпича (авт.св. Ns 421593, кл. В 65 G 47/74), содержащий направляющие, грузовую тележку для продольного перемещения с расположенной на ней тележкой для поперечного перемещения, подъемно-опускной орган с поворотной кассетой для захвата груза.
Недостатками этого устройства являются невозможность регулирования грузоподъемности и вертикального хода, большие габариты.
Наиболее близким по технической сущности к предлагаемому является передаточное устройство (авт.св. № 958274, кл. В 65 G 47/60), содержащее грузовую тележку, направляющие, механизм подъема с приводом вертикального перемещения и поворотную платформу.
Недостатками этого устройства также являются невозможность регулирования грузоподъемности и вертикального хода, большие габариты.
Целью изобретения является обеспечение возможности регулирования грузоподъемности и вертикального хода, уменьшение габаритов.
Поставленная цель достигается тем, что подъемно-перегрузочное устройство содержит направляющие, подвижно установленную на них грузовую тележку с подъемно-опускным грузовым органом, на которой установлены механизм поворота вокруг вертикальной оси и механизм подъема. Механизм подъема выполнен в виде двух рам с горизонтальными пазами, одна из которых соединена с грузовым органом, а другая с механизмом поворота. Рамы связаны между собой посредством тросо-блочной системы и двумя парами шарнирных рычагов, один шарнир каждого из которых расположен в горизонтальном пазу с возможностью перемещения. Верхняя рама имеет в зоне горизонтального паза установочную линейку и подвижно установленные вдоль нее с возможностью фиксации и взаимодействия с шарниром одного из рычагов датчики.
Кроме того привод механизма подъема
расположен между верхней и нижней рамами и парами шарнирных рычагов.
Сопоставительный анализ с прототипом показывает, что новизна предлагаемого решения заключается в том, что механизм
подъема выполнен в виде двух рам с горизонтальными пазами, одна из которых соединена с грузовым органом, а другая - с механизмом поворота, при этом рамы связаны между собой посредством тросо-блочной системы и двумя парами шарнирных рычагов, один шарнир каждого из которых расположен в горизонтальном пазу с возможностью перемещения, причем верхняя рама имеет в зоне горизонтального паза
установочную линейку и подвижно установленные вдоль нее с возможностью фиксации и взаимодействия с шарниром одного из рычагов датчики.
Привод механизма подъема расположен между верхней и нижней рамами и парами шарнирных рычагов.
Сравнение предлагаемого решения не только с прототипом, но и с другими техническими решениями показало, что предлагаемая совокупность существенных признаков и получаемый в результате эффект-обеспечение возможности регулирования грузоподъемности и вертикального хода, уменьшение габаритов- являются новыми, что позволяет установить соответствие решения критерию существенные отличия.
Использование предложенного подъемно-перегрузочного устройства позволяет транспортировать изделия между рабочими позициями, имея возможность регулирования величины вертикального хода и грузоподъемности, при малых габаритах самого устройства, таким образом, предлагаемое решение соответствует критерию положительный эффект.
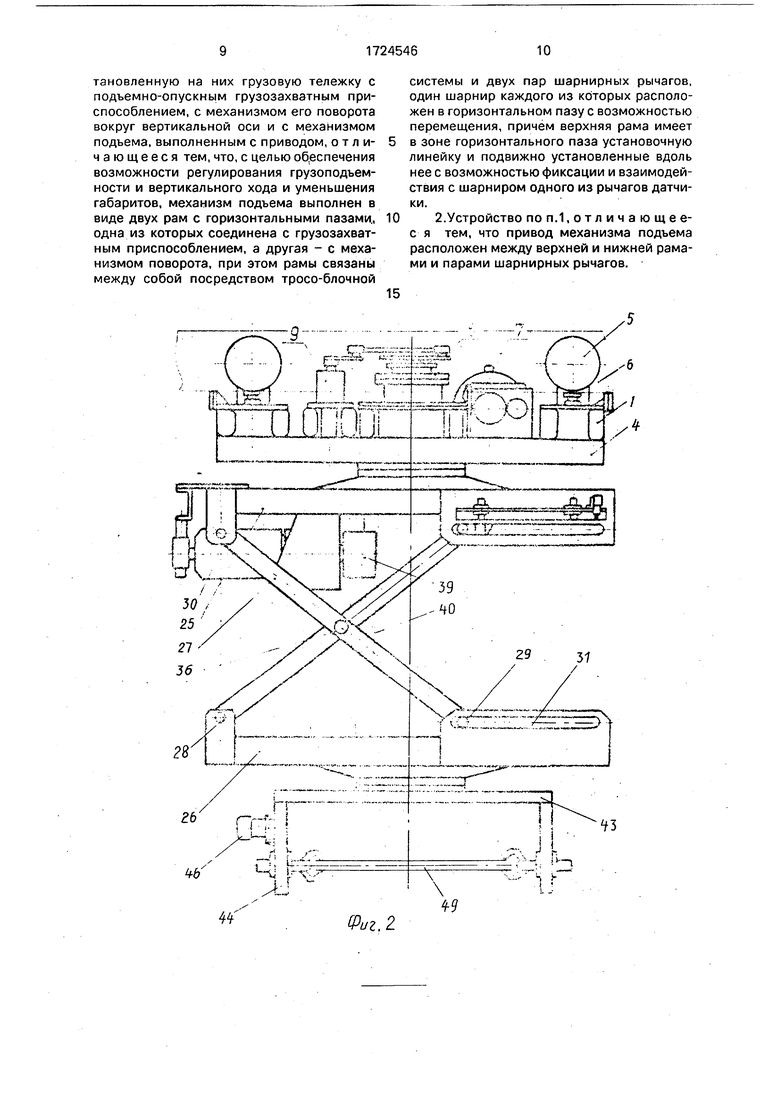
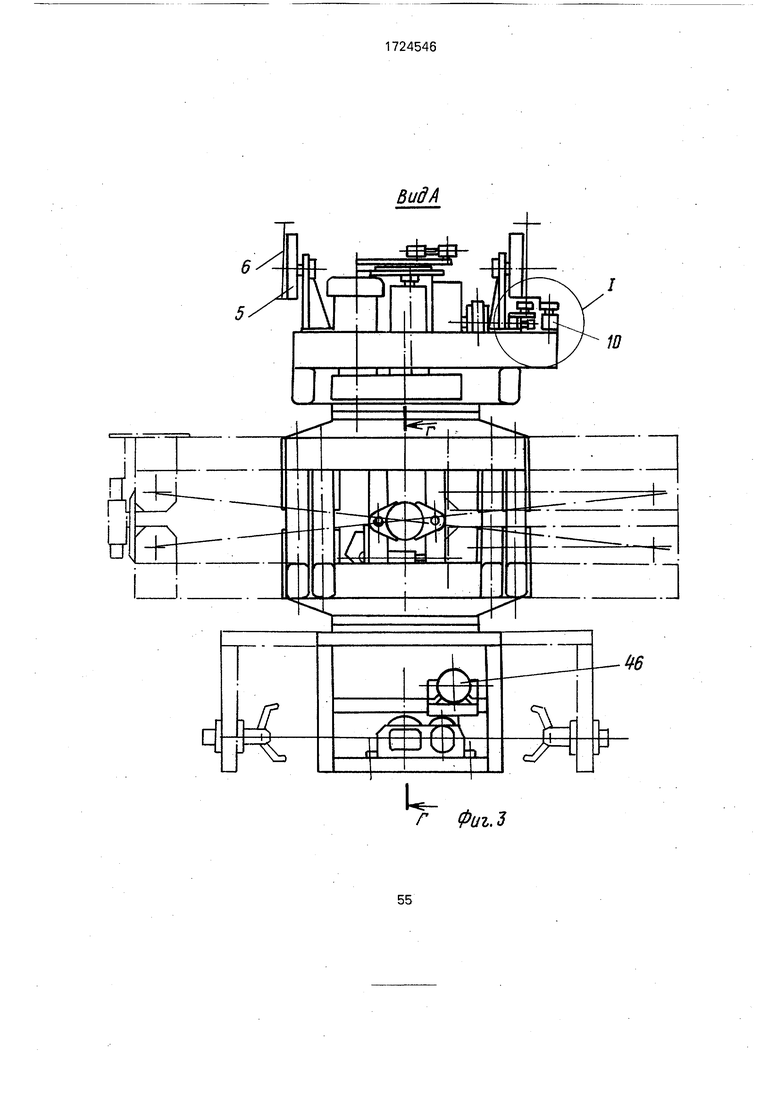
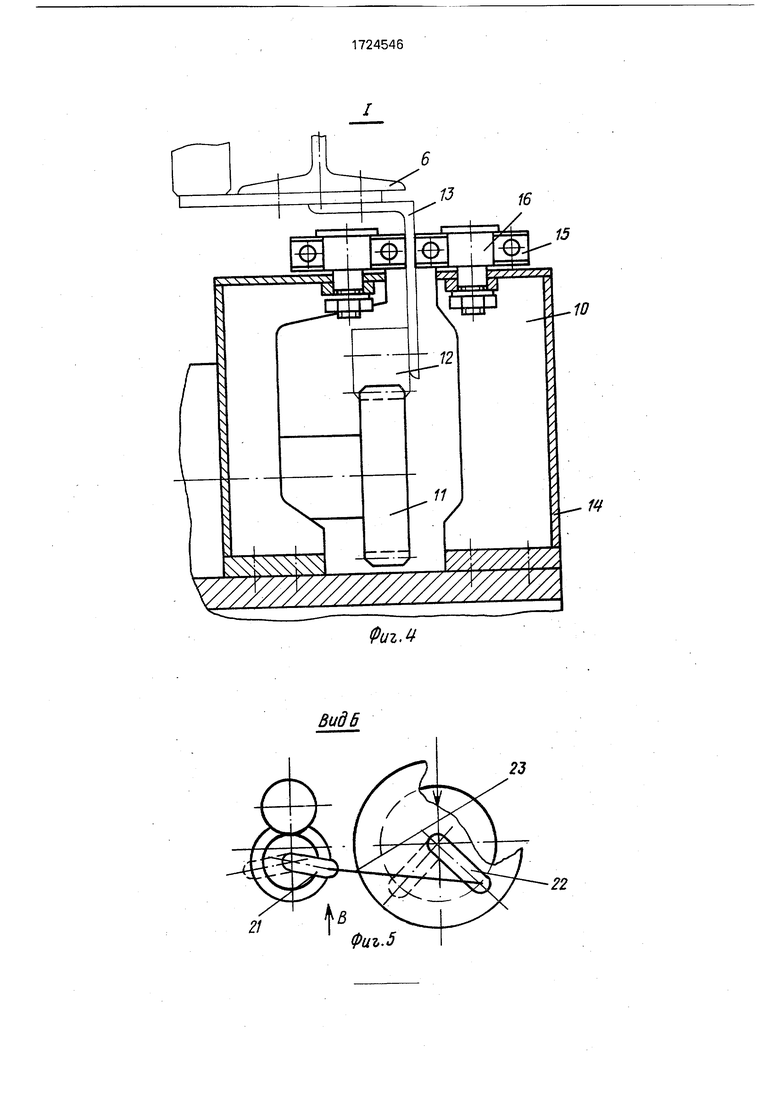
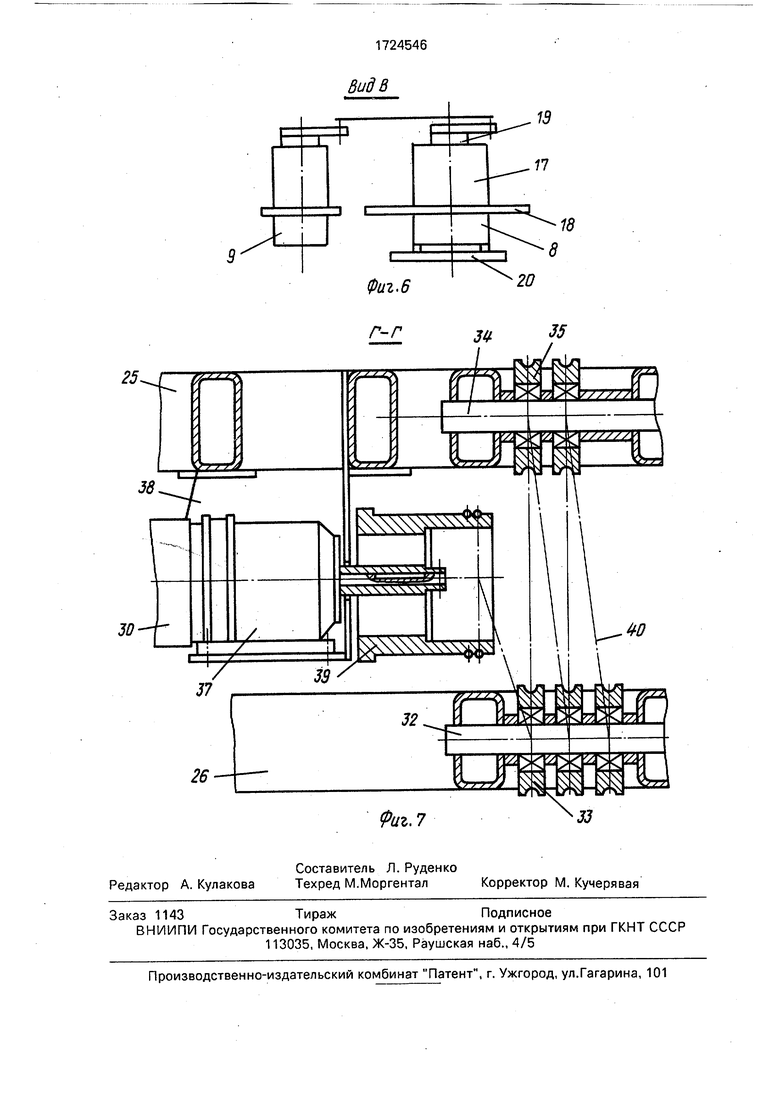
На фиг.1 изображено подъемно-перегрузочное устройство в исходном состоянии; на фиг.2 - то же, в опущенном состоянии; на фиг.З - вид А на фиг.1; на фиг.4 - узел I на фиг.З; на фиг.5 - вид Б на фиг.1; на фиг.6 - вид В на фиг.5;. на фиг.7 - разрез Г-Г на фиг.З.
Подъемно-перегрузочное устройство состоит из грузовой тележки 1; механизма 2 подъема и грузозахватного приспособления 3.
Грузовая тележка 1 представляет собой раму 4, на которой смонтированы катки 5 для перемещения по направляющим 6, привод 7 горизонтального перемещения, поворотное устройство 8 и привод 9 поворота вокруг вертикальной оси, роликовые опоры 10.
Установленный на грузовой тележке привод 7 горизонтального перемещения имеет на выходном валу шестерню 11, взаимодействующую с рейкой 12, неподвижно закрепленной на направляющей 13, неподвижно связанной с одной из направляющих 6. Шестерня 11, обкатываясь по рейке 12, приводит в движение всю тележку 1. Для направления движения тележки и точности ее позиционирования относительно оси движения на тележке установлены роликовые опоры 10, представляющие собой кронштейн 14, к которому прикреплены ролики 15, свободно вращающиеся на оси 16. При горизонтальном перемещении ролики 15 взаимодействуют с направляющей 13 и препятствуют смещению тележки относительно продольной оси перемещения.
Поворотное устройство 8 представляет i собой неподвижный кронштейн 17, прикрепленный к раме грузонесущей тележки
5 фланцем 18, внутри кронштейна установлена поворотная часть 19, к фланцу 20 которой крепится механизм 2 подъема. Привод 9 соединен с поворотным устройством посредством звеньев 21,22 и тяги 23.
0 Механизм 2 подъема крепится к грузовой тележке при помощи фланца 24, имеющего те же размеры и конфигурацию, что и фланец 20.
Механизм 2 подъема представляет со5 бой сборную конструкцию, состоящую из двух сварных рам, верхней 25 и нижней 26, соединенных между собой двумя парами рычагов 27 через неподвижные 28 и подвижные 29 шарниры, и привода 30 подъема.
0 Шарниры 29 имеют возможность горизонтального перемещения в пазах 31 верхней и нижней рам. На оси 32, закрепленной в нижней раме, установлены три обводных блока 33, на такой же оси 34, закрепленной в вер5 хней раме, установлены два обводных блока 35. Рычаги между собой попарно соединены осями 36.
Привод механизма подъема состоит из мотора-редуктора 37, установленного на
0 кронштейне 38, который крепится к верхней раме 25 и внутри между рычагами 27. На вал мотора-редуктора 37 насажен барабан 39, на котором закреплен канат 40, запасован- ный через блоки верхней и нижней рам.
5 Меняя количество соединенных между собой блоков, можно менять скорость и грузоподъемность подъемно-перегрузочного устройства.
Блоки 33,35, оси 32,34,36, барабан 39 и
0 канат 40 составляют тросо-блочную систему.
С наружной стороны верхней рамы 25 механизма подъема в зоне горизонтального паза крепится установочная линейка 41 с
5 нанесенными на ней делениями и установленными на ней датчиками 42, передвигая которые на определенное деление, устанавливают необходимую величину вертикального перемещения.
0 Т.е. линейка 41 с установленными на ней датчиками 42 служит для регулировки вертикального перемещения на необходимую величину.
Грузозахватное приспособление 3 со5 стоит из рамы 43, стоек 44, захватов 45, привода поворотов захватов 46.
Крепится приспособление к фланцу 47 механизма подъема фланцем 48. Оба фланца имеют те же размеры, что и фланцы 20,24. Таким образом, места соединения между
собой грузовой тележки, механизма подъема и грузозахватного приспособления все
одинаковые.
Грузоподъемное приспособление можно установить перпендикулярно изображенному на фиг.1, что показано тонкими линиями на фиг.З.
Работает подъемно-перегрузочное устройство следующим образом.
В исходном положении подъемно-перегрузочное устройство находится в заданном условиями работы положении, т.е. в любой точке горизонтальной оси перемещения.
Механизм 2 подъема, прикрепленный фланцем 24 к фланцу 20 тележки 1, поднят в крайнее верхнее положение, т.е. рычаги 27 сложены, подвижные шарниры 29 находятся в крайнем правом положении.
Захваты 45 раскрыты и повернуты в заднее положение.
На линейке 41 датчики 42 установлены на необходимую величину, т.е. отрегулирована величина вертикального перемещения.
При включении установленного на кронштейне 38 привода 30 механизма подъ- ема поворачивается насаженный на валу мотора-редуктора 37 барабан 39, разматывается канат 40, который поворачивает блоки 33 вокруг оси 32, одновременно поворачивая блоки 35 вокруг оси 34, проис- ходит опускание нижней рамы 26, при этом верхняя рама 25 остается неподвижной. Левый конец рычагов 27 поворачивается вокруг неподвижных шарниров 28, а правый посредством подвижных шарниров 29 скользит по пазам 31 верхней и нижней рам. Одновременно рычаги вращаются попарно вокруг осей 36 (фиг.2). Происходит вертикальное перемещение вниз прикрепленной к фланцу 47 фланцем 48 рамы 43 грузозах- ватного приспособления 3 на заданную величину.
После опускания закрываются захваты 45, захватывая изделие49. Включается привод 30 в обратную сторону и происходит подъём грузозахватного приспособления с изделием.
В верхнем положении включается привод поворота захватов 46, установленный на стойке 44, поворачивая изделие 49 в за- данное положение.
После этого включается привод 7 горизонтального перемещения, установленный на раме 4 тележки 1, на валу которого насажена шестерня 11. Шестерня 11, обкатыва- ясь по рейке 12, неподвижно соединенной посредством направляющей 13 с одной из направляющих 6, сообщает вращательное движение каткам 5, которые сообщают устройству горизонтальное положение.
Для направления движения служат роликовые опоры 10. Ролики 15, вращаясь вокруг осей 16, установленных в кронштейнах 14 роликовых опор 10, катятся по направляющей 13 и препятствуют смещению устройства относительно горизонтальной оси перемещения.
Одновременно с горизонтальным перемещением включается привод 9 поворота вокруг вертикальной оси, который через звенья 21,22 и тягу 23 сообщает вращательное движение поворотной части 19, которая вращается в неподвижном кронштейне 17 поворотного устройства 8. Кронштейн 17 фланцем 18 неподвижно прикреплен к раме 4 грузовой тележки 1.
Вместе с поворотной частью вращается прикрепленный механизм подъема с грузозахватным приспособлением 3 и изделием 49.
После остановки тележки происходит вертикальное перемещение вниз нижней рамы 26 механизма 2 подъема с грузозахватным приспособлением 3 и изделием 49 на заданную величину. Захваты 45 раскрываются, освобождая изделие, грузозахватное приспособление перемещается вертикально вверх.
Затем захваты 45 поворачиваются в исходное положение включением привода поворота захватов 46.
Грузовая тележка 1 перемещается в исходное положение и одновременно по пути происходит поворот механизма 2 подъема в исходное положение.
Подъемно-перегрузочное устройство готово к повторению работы.
Каждая из рассмотренных здесь частей, т.е. грузовая тележка 1, механизм 2 подъема, грузозахватное приспособление 3 имеют автономные приводы и могут работать автономно и в различной комбинации друг с другом.
Например, грузовая тележка с грузозах- ватным приспособлением, подвешенным, как показано на фиг.1 и 3.
Механизм подъема с грузозахватным приспособлением может быть подвешен к стационарной части с целью переворота изделия в одном и том же месте.
Подъемно-перегрузочное устройство целиком и по частям (модулям) может быть использовано в различных отраслях народного хозяйства для гибких производственных систем при работе в автоматическом режиме.
Формула изобретения 1 .Подъемно-перегрузочное устройство, включающее направляющие, подвижно установленную на них грузовую тележку с подъемно-опускным грузозахватным приспособлением, с механизмом его поворота вокруг вертикальной оси и с механизмом подъема, выполненным с приводом, отличающееся тем, что, с целью обеспечения возможности регулирования грузоподъемности и вертикального хода и уменьшения габаритов, механизм подъема выполнен в виде двух рам с горизонтальными пазами., одна из которых соединена с грузозахватным приспособлением, а другая - с механизмом поворота, при этом рамы связаны между собой посредством тросо-блочной
W
Фиг.г
0
системы и двух пар шарнирных рычагов, один шарнир каждого из которых расположен в горизонтальном пазу с возможностью перемещения, причем верхняя рама имеет в зоне горизонтального паза установочную линейку и подвижно установленные вдоль нее с возможностью фиксации и взаимодействия с шарниром одного из рычагов датчики.
Вид А
ЧШ //////Л7
Видб
Фиг.У
J L
Виде
.13 17
18
Фиг ,6
20
| 1972 |
|
SU421593A1 | |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Передаточное устройство подвесного конвейера | 1980 |
|
SU958274A1 |
| кл | |||
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
