Изобретение относится к .оборудованию складов, в частности к конструкциям устройств управления приводом телескопического захвата стеллажног крана-штабелера, и может быть исп®льзовано в различных отраслях промышленности в автоматизированных складах.
Цель изобретения - повышение надежности.
На фиг. :1 схематически изображено устройство, исходное положение; на фиг. 2 - то же, положение элементов при отсутствии препятствий; на фиг. 3 - то же, положение элементов при наличии препятствия; на фиг. 4 - вид А на фиг. 3.
10
ет толкатель 15 в направляющих 16 вниз. Ролик 14, взаимодействуя с пазом 13 рычага 10 и растягивая пружину И, поворачивает рычаг 10 в шарнире 12 против часовой стрелки. При этом гибкая тяга 9 начинает провисать, пружина 8 начинает сжиматься и поворачивать боковое звено 7 шарнирного параллелограмма против часовой стрелки. Когда толкатель 15 под воздействием лыжи 18 опустится в свое нижнее положение и пружина 8 полностью сожмется, шарнирный параллелограмм займет свое рабочее положение. В этом положении шунт 1 выступает за пределы платформы 19 и входит в ячейку стеллажа (фиг. 2). При отсутствии препяст(Lt rl I t tj f /Л - t M- .,1
Устройство для управления приводом .вия шунт 1 не взаимодействует с датчиком
. . „„ ,т Л -II л r-ijr-TORjfvr 7гтпарприия ГТПИНППОМ Т6Л6
20
телескопического захвата стеллажного крана-штабелера содержит шунт 1 в виде штока, установленный в направляюш,их 2 и подпружиненный в продольном направлении, например, пружиной 3 кручения: Шунт 1 имеет возможность взаимодействия с датчиком 4, включенным в цепь управления приводом телескопического захвата (не показано}. Направляюшие 2, пружина З; датчик 4 установлены на верхнем звене 5 шар- нирног о параллелограмма, установленного g на основании 6. Боковое звено 7 шарнирного параллелограмма с одной стороны пружиной 8 связано 1C основанием 6, а с другой стороны гибкой тягой 9 связано с одним плечом Г-об- разного рычага 10. Другое плечо Г-образ- ного рычага 10 пружиной 11 связано с основанием 6. Г-образ ный рычаг 10 установлен на основании 6 в шарнире 12 и имеет паз 13, в котором установлен нижний ролик вертикального толкателя 15. Толкатель 15 установлен с возможностью вертикального пере30
4 и в систему управления приводом телескопического захвата (не показано) поступает сигнал о возможности дальнейшего выдвижения платформы 19. Лыжа 18 сходит с ролика 17, толкатель 15 под воздействием пружины 1 поднимается в свое верхнее положение. При этом рычаг 10 поворачивается по часовой стрелке, гибкая тяга 9, растягивая пружину 8, возвраш,ает шарнирный па- ралелограмм в исходное положение, при котором его боковое звено 7 упирается в упор 20, установленный на основании 6 фкг. I), закрепленном на неподвижной платформе 21.
При наличии препятствия, т.е. груза, устройство работает следуюш.им образом.
В начале выдвижения подвижной платформы 19 влево элементы устройства функционируют аналогично первому случаю (фиг. 2).Встречая на своем пути груз (препятствие), шунт 1 останавливается в своем
шарнирного
движении, а верхнее звено о
мнения в направляющих 16 основания 6, 35 параллелограмма продолжает свое движение а веохний ролик 17 толкателя 15 имеет воз- вперед (фиг. 3). При этом пружина 3 закру- можностть взаимодействия с лыжей 18, зак- чивается, шунт 1 перемещается в направ- репленной на подвижной платформе 19 те- ляющих 2 и взаимодействует с датчиком лескопического захвата. Усилия пружин 8 и 4, который подает сигнал в систему управле- 11 и плечи рычага 10 подобраны таким об-ния приводом телескопического захвата,
разом, что обеспечивается возможность взаи- 40 модействия бокового звена 7 шарнирного параллелограмма с упором 20, установленным на основании 6, т.е. выполняется условие
P,,
где PI -усилие пружины 8;
Ро -усилие пружины 11;
LI, La - см. на фиг. 3.
Основание 6 закреплено на неподвижной платформе 21 телескопического захвата. В исходном положении (фиг. 1) шунт 1 не выступает за габариты подвижной платформы 19 и не взаимодействует с датчиком 4. Пружина 8 растянута, пружина 11 сжата и боковое звено шарнирного параллелограмма прижато к упору 20.
При отсутствии препятствия, т.е. груза, 55 устройство работает следующим образом.
При выдвижении подвижной платформы
В том случае, если щунт 1, упершись в груз, займет крайнее положение в направляющих 2, пружина 8 полностью сожмется и приведет шарнирный параллелограмм в рабочее положение, а лыжа 18 еще продолжает опускать толкатель 15 вниз, то гибкая тяга 9 провиснет и поломки устройства не произойдет.
В предлагаемом устройстве все элементы его смонтированы на одном основании, зак- 50 репленном на неподвижной платформе те- . лескопического захвата, что облегчает мон таж и в процессе эксплуатации не происходит нарушения взаимного расположения эле ментов устройства, что повышает его на дежность.
Формула изобретения
19 влево, (фиг. 2) лыжа 18 своей боковой поверхностью, нажимая на ролик 17, опускаУстройство для управления приводом те лескопического захвата стеллажного крана
0
ет толкатель 15 в направляющих 16 вниз. Ролик 14, взаимодействуя с пазом 13 рычага 10 и растягивая пружину И, поворачивает рычаг 10 в шарнире 12 против часовой стрелки. При этом гибкая тяга 9 начинает провисать, пружина 8 начинает сжиматься и поворачивать боковое звено 7 шарнирного параллелограмма против часовой стрелки. Когда толкатель 15 под воздействием лыжи 18 опустится в свое нижнее положение и пружина 8 полностью сожмется, шарнирный параллелограмм займет свое рабочее положение. В этом положении шунт 1 выступает за пределы платформы 19 и входит в ячейку стеллажа (фиг. 2). При отсутствии препяст.,1
.вия шунт 1 не взаимодействует с датчиком
.вия шунт 1 не взаимодействует с датчиком
Л -II л r-ijr-TORjfvr 7гтпарприия ГТПИНППОМ Т6Л6
0
g
30
4 и в систему управления приводом телескопического захвата (не показано) поступает сигнал о возможности дальнейшего выдвижения платформы 19. Лыжа 18 сходит с ролика 17, толкатель 15 под воздействием пружины 1 поднимается в свое верхнее положение. При этом рычаг 10 поворачивается по часовой стрелке, гибкая тяга 9, растягивая пружину 8, возвраш,ает шарнирный па- ралелограмм в исходное положение, при котором его боковое звено 7 упирается в упор 20, установленный на основании 6 фкг. I), закрепленном на неподвижной платформе 21.
При наличии препятствия, т.е. груза, устройство работает следуюш.им образом.
В начале выдвижения подвижной платформы 19 влево элементы устройства функционируют аналогично первому случаю (фиг. 2).Встречая на своем пути груз (препятствие), шунт 1 останавливается в своем
шарнирного
движении, а верхнее звено о
параллелограмма продолжает свое движение вперед (фиг. 3). При этом пружина 3 закру- чивается, шунт 1 перемещается в направ- ляющих 2 и взаимодействует с датчиком 4, который подает сигнал в систему управле- ния приводом телескопического захвата,
В том случае, если щунт 1, упершись в груз, займет крайнее положение в направляющих 2, пружина 8 полностью сожмется и приведет шарнирный параллелограмм в рабочее положение, а лыжа 18 еще продолжает опускать толкатель 15 вниз, то гибкая тяга 9 провиснет и поломки устройства не произойдет.
В предлагаемом устройстве все элементы его смонтированы на одном основании, зак- репленном на неподвижной платформе те- лескопического захвата, что облегчает монтаж и в процессе эксплуатации не происходит нарушения взаимного расположения элементов устройства, что повышает его надежность.
Формула изобретения
Устройство для управления приводом телескопического захвата стеллажного кранаштабелера, содержащее подпружиненный в продольном направлении шунт в виде штока, обраш,енного одним концом в сторону ячейки стеллажа и установленный в горизонтальных направляющих с возможностью взаимодействия с датчиком, включенным в цепь управления приводом телескопического захвата и приспособления для горизонтального перемещения щунта, отличающееся тем, что, с целью повыщения надежности, приспособление для горизонтального перемещения шунта содержит рычажный мехаризм, связанный с основанием н образующий с ним шарнирный параллелограмм, одно из боковых звеньев которого соединено посредством пружины с этим основанием Г-образный
рычаг, средней частью закрепленный на основании и одним плечом посредством пружины соединенный с последним, а другим посредством гибкой тяги - с боковым звеном шарнирного параллелограмма, и выполненный с продольным пазом на перЕЮм плече, толкатель, размещенный в вертикальных направляющих основания, имеющий ролики по концам, нижний из которых размещен в пазу Г-образного рычага, и лыжу,
смонтированную на выдвижной платформе захвата для взаимодействия с верхним роликом таткатетя, при этом горизонтальные н аправляющие шунта и датчик смонтированы на верхнем горизонтальном звене шарнирного параллелограмма.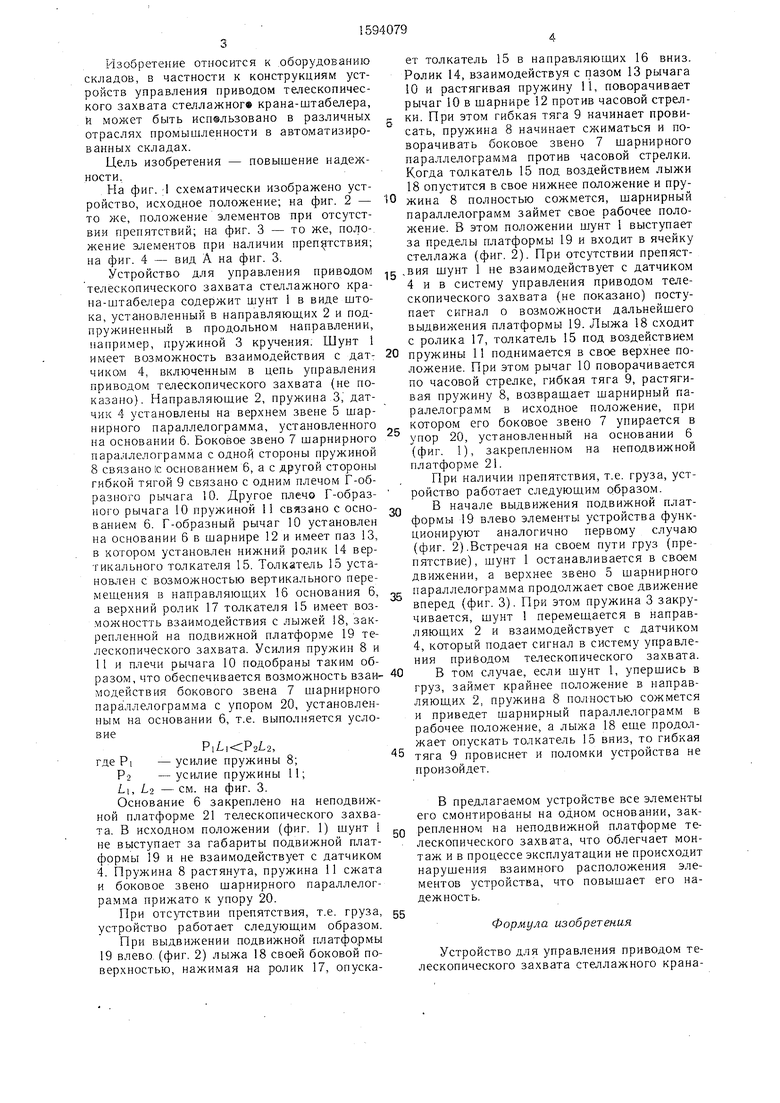
| название | год | авторы | номер документа |
|---|---|---|---|
| Перегружатель штучных грузов | 1982 |
|
SU1022876A1 |
| Устройство для управления приводом телескопического захвата стеллажного крана-штабелера | 1986 |
|
SU1384481A1 |
| Устройство для управления приводом телескопического захвата стеллажного крана-штабелера | 1990 |
|
SU1733346A1 |
| Устройство для управления приводом телескопического захвата стеллажного крана-штабелера | 1988 |
|
SU1518229A2 |
| Устройство для управления телескопическим захватом стеллажного крана-штабелера | 1982 |
|
SU1008156A1 |
| Устройство для управления приводом телескопического захвата стеллажного крана-штабелера | 1985 |
|
SU1341122A2 |
| Манипулятор для загрузки конвейера мешковыми грузами | 1985 |
|
SU1316949A1 |
| Устройство для контроля занятости ячейки стеллажного крана-штабелера | 1977 |
|
SU747779A2 |
| ТЕЛЕСКОПИЧЕСКАЯ МАЧТА ДЛЯ ПОДЪЕМНИКОВ | 1969 |
|
SU239517A1 |
| Перегрузочное устройство | 1987 |
|
SU1602833A1 |


Изобретение относится к оборудованию складов, в частности к устройствам управления приводом телескопического захвата стеллажного крана-штабелера, и может быть использовано в различных отраслях промышленности в автоматизированных складах. Цель изобретения - повышение надежности. Устройство содержит подпружиненный в продольном направлении шунт 1, обращенный одним концом в сторону ячейки стеллажа и установленный в горизонтальных направляющих 2 с возможностью взаимодействия с датчиком 4, включенным в цепь управления приводом телескопического захвата. Горизонтальные направляющие шунта и датчик закреплены на верхнем звене 5 шарнирного параллелограмма, установленного на основании, боковое звено 7 параллелограмма с одной стороны пружиной связано с основанием, а с другой сторону гибкой тягой 9 - с одним плечом Г-образного рычага 10, шарнирно закрепленного на основании. Другое плечо Г-образного рычага пружиной связано с основанием и имеет паз, в котором установлен нижний ролик 14 вертикального толкателя 15, расположенного в направляющих 16 основания. Верхний ролик 17 вертикального толкателя имеет возможность взаимодействия с лыжей 18, закрепленной на подвижной платформе 19 телескопического захвата. При этом усилия пружин и размеры плеч Г-образного рычага, к которым приложены эти усилия, обеспечивают возможность взаимодействия бокового звена шарнирного параллелограмма с упором 20, установленным на основании, закрепленном на неподвижной платформе 21 телескопического захвата. 4 ил.
| М,.
г8
X
19
11Г
16
fe.2
3 4 12
Фиг.З
(Риг.
| Устройство для управления приводом телескопического захвата стеллажного крана-штабелера | 1984 |
|
SU1204507A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Устройство для управления приводом телескопического захвата стеллажного крана-штабелера | 1986 |
|
SU1384481A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
