,-:-- - ---...--: .л1.-;;..,- ...:..,--- у .,- . .
(21)4853565/11 - (22)25.07.90
(46)23.12.92. Бюл. №47,
(71) Симферопольское научно-производственное объединение механизации и автома- тизацйи питрузочно-разгрузочных и складских работ
(56)Авторское свидетельство СССР № 1341119. кл. В 65 G 1/00, 1985г.
Авторское свидетельство СССР № 7966181, кл, В 66 С 23/20. 1978.
Авторское свидетельство СССР № 78586, кл. 6 66 F 9/06, 1949. (54) КРАН-ШТАБЕЛЕР
(57)Использование: в подъемно-транспорТ ном оборудовании, используемом преимущественно в строительстве. Сущность изобретения: горизонтальные направляющие перемещения несущей тележки кранаштабелера прикреплены к карнизу в средней части обслуживаемого объекта, а телескопическая стрела закреплена на несущей тележке. Телескопическая стрела имеет возможность выдвижения как вверх, так и вниз по отношению к уровню крепления горизонтальных направляющих перемещения несущей тележки. Устранение моста большого размера, приводит к уменьшению металлоемкости. Компоновка приво да крана-штабе- лера дает возможность посредством соответствующего включения муфт сочетать одновременно поднятие (опускание) грузовой платформы вместе с телескопической стрелой и перемещением несущей тележки по горизонтальным напраШйющйм, й также дает возможность совершать указанные перемещения поочередно, каждое в отдельности. 9 ил.
w
Ё
| название | год | авторы | номер документа |
|---|---|---|---|
| БИБЛИОТЕКА | | 1971 |
|
SU302308A1 |
| ВЗССО'гОЗНАЯ | 1973 |
|
SU368153A1 |
| Склад для хранения штучных грузов | 1986 |
|
SU1368232A1 |
| Кран-штабелер | 1978 |
|
SU796181A1 |
| Стеллажный кран-штабелер | 1988 |
|
SU1643338A1 |
| Крановая установка | 1986 |
|
SU1361103A1 |
| Кран-штабелер транспортно-накопительной системы | 1987 |
|
SU1615077A1 |
| Кран-штабелер | 1983 |
|
SU1164157A1 |
| Грузоподъемник крана-штабелера | 1990 |
|
SU1733347A1 |
| Кран-штабелер | 1985 |
|
SU1323472A1 |

Изобретение относится.к подъемно- транспортному оборудованию, а именно к кранам-штабелерам.
Известен кран-штабелер (1), содержащий приводную тележку, колонну и подьема грузОподьемной платформы, размещенный на раме и связанный посрёдст- вом гибких органов с ней.
Известен кран-штабелер (2), содержащий подвижный по расположенным одна под другой горизонтальным направляющим мост с перемещающейся по нему тележкой, несущей вертикальную стрелу, снабженную подъемно-опускной грузовой платформой. Известен также кран-штабелер (3), содержащий ходовую тележку, перемещаемую по горизонтальным нёправляюЩйгм вертикальную телескопическую трехсёкЦйонную стрелу с перемещающейся вдоль всех ее секций подъемно-опускной грузовой платформой и механизм вертикального перемещения грузовой платформы и секций стрелы, который содержит барабан, связанный с приводом перемещения ходовой тележки, и гибкие органы
Недостатком указанного устройства является сложность конструкции, обусловленная наличием ползушкй. упора и направляющих для ползушки.
Целью изобретения является упрощение конструкции.
Поставленная цель достигается тем, что в кране-штабелере, содержащем ходовую тележку, перемещаемую по горизонтальным направляющим, вертикальную телеско- пическую трехсекцШнную стрелу,
XI 00
ю оа
имеющую перемещаемую вдоль всех ее секций подьемно-опуЪкную грузовую платформу, и механизм вертикального перемещения грузовой платформы и секций стрелы, который включает барабан, связанный с приводом перемещения ходовой тележки, и гибкие органы, на средней секции телескопической стрелы, в ее центре, смонтирована штанга, третий гибкий орган мехами и реверсивный электродвигатель 13 с дистанционным управлением. Причем электродвигатель 13 с дистанционным управлением имеет возможность через сцепляемую управляемую двухстороннюю электрическую муфту 14, взаимодействующую со звездочкой 15, посредством цепи 16 и звездочки 17, неподвижно закрепленной на оси 18 приводных колес 19 ходовой тенизма вертикального перемещения 10 лежки 3, перемещать последнюю по гори- подъемно-опускной платформы и секций стрелы своими концами прикреплен к упомянутой Штанге и размещен с огибанием уравнительных блоков, закрепленных на этой платформе, и вал барабана этого меха- низм а связан с приводом ходовой тележки посредством зубчатой передачи и размещенной на выходном валу упомянутогб привода-- управляемой двухсторонней электромуфты.
Сущность изобретения поясняется чертежами, iI
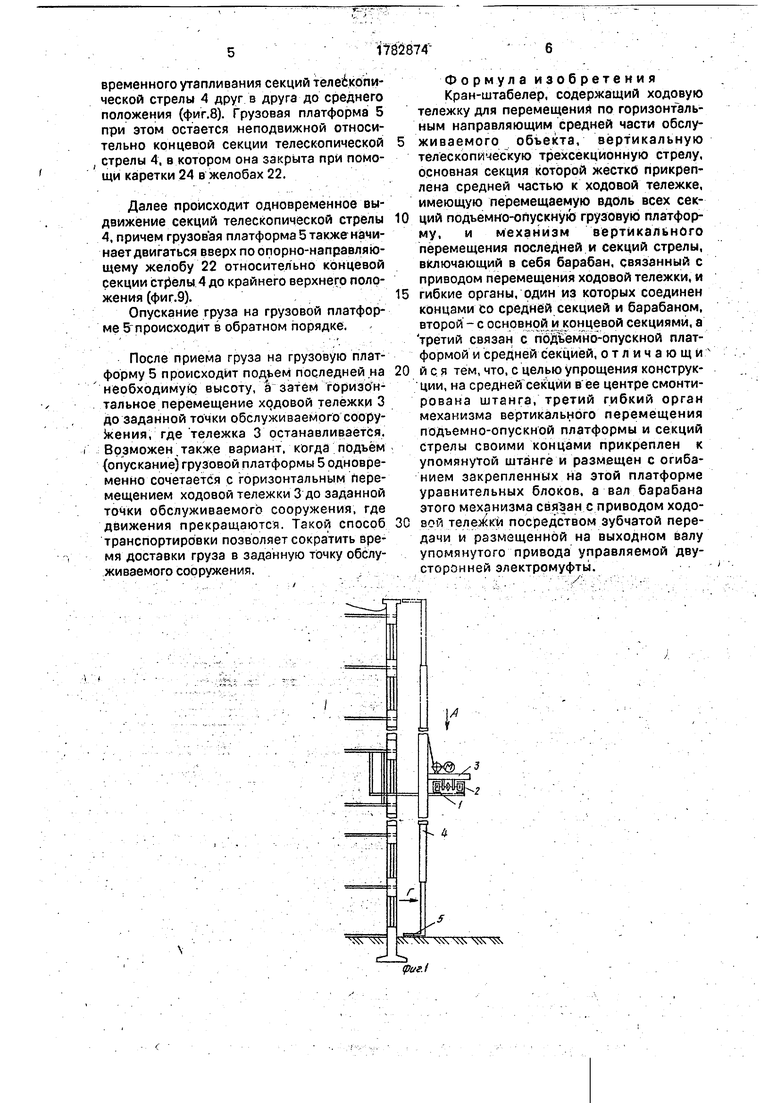
На фиг.1 изображена схема предлагаемого крана-штабелера, вид сбоку; на фиг.2
15
20
зонтальным направляющим 1,2 с возможными остановками в заданных точках (фиг.2,3).Ходовая тележка 3 содержит также регулируемые прижимные ролики 20, обеспечивающие плотный контакт колес тележки 3 с горизонтальными направляющими 1 и 2; а также фиксацию тележки 3, в поперечном направлении относительно направляющих 1 и 2 (фиг.3,4).
Предлагаемая компоновка привода крана-штабелера дает возможность посредством соответствующего включения муфт 11 и 14, сочетать как одновременное поднятие
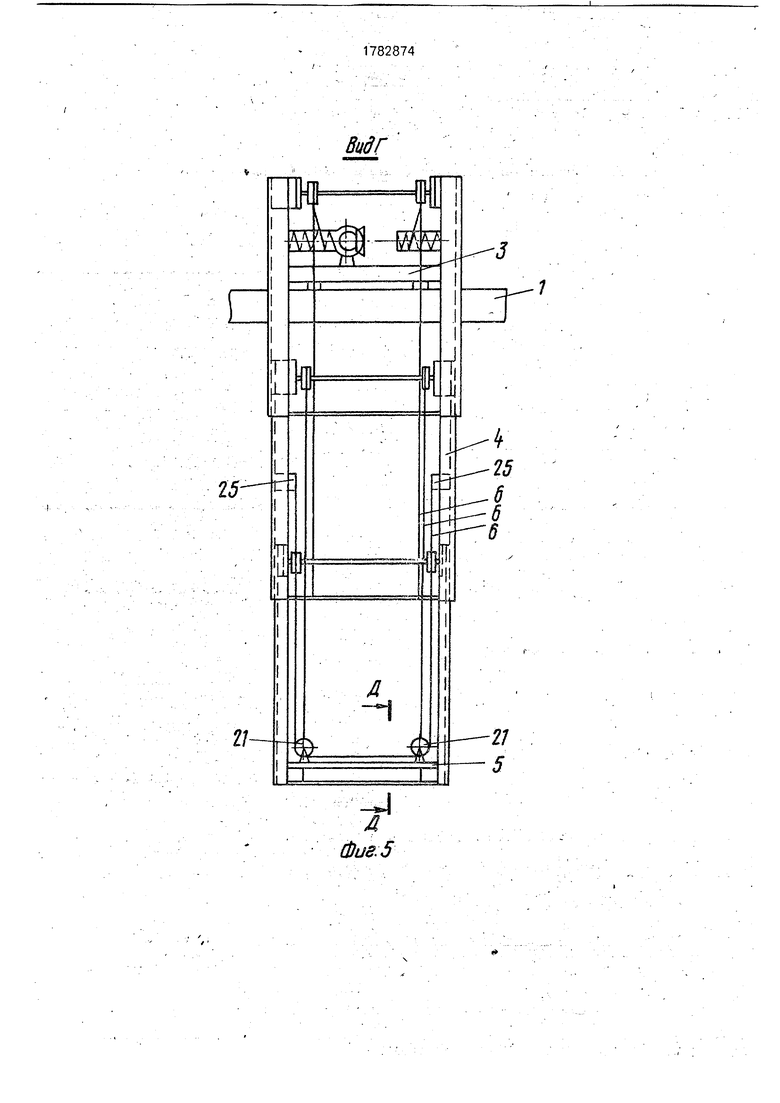
-вид А сверху: на фиг.З показано продоль- 25(опускание) грузовой платформы 5 вместе с ное сечение Б-Б несущей тележки; на фиг.4телескопической стрелой 4 и перемещени-поперечное сечение В-В несущей тележ-ем ходовой тележки 3 по горизонтальным ки; фиг.5 - фронтальный вид Г предлагаемо-направляющим 1 и 2, так и возможность го крана-штабелера в крайнем нижнемсовершать указанные перемещения пооче- положении, соответствующем приему (сня- 30редно, каждое в отдельности.
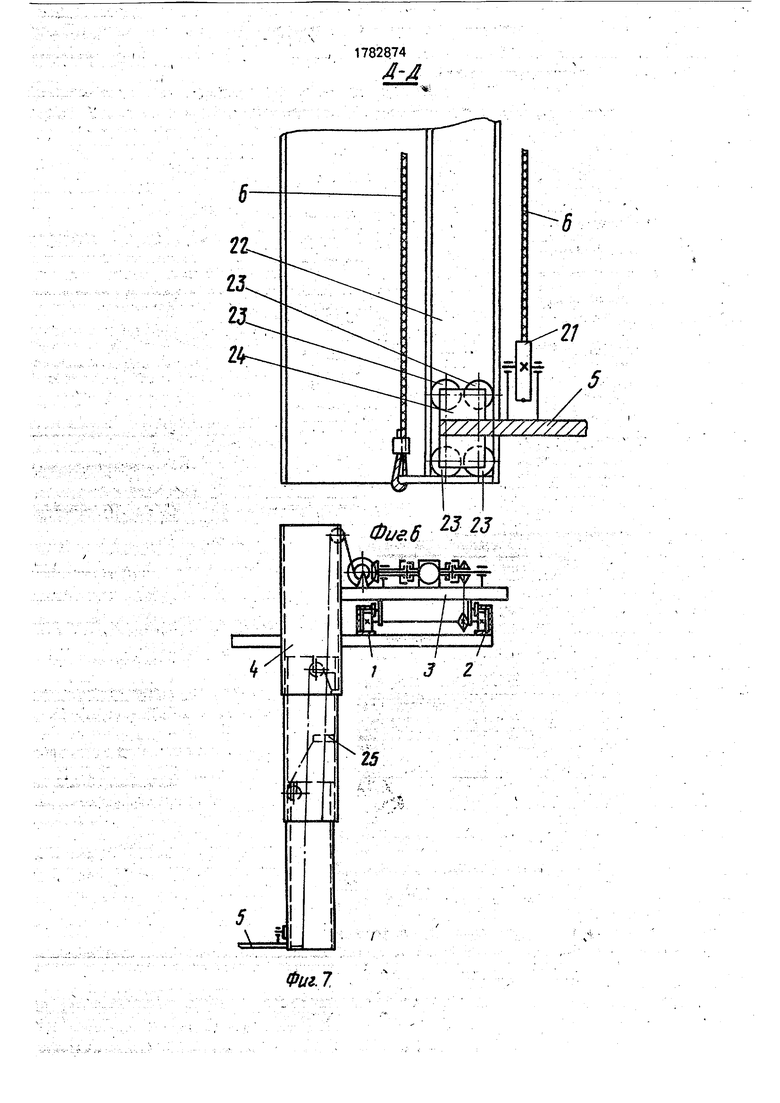
тию) груза; фиг.6 - продольное сечение Д-ДДля обеспечения нормального положевнутреннего выдвижного звена телескопи-ния подъемно-опускной грузовой платфорческой стрелы с грузовой платформой; фиг.7мы 5 в случае неравномерной вытяжки
-показано нижнее (исходное) положениеветвей каната б, на платформе 5 закреплены телескопической стрелы с грузовой плат- 35два уравнительных блока 21 (фиг.2,5, 6). формой; фиг.8 - среднее положение теле-Для сохранения геометрического поло- скопической стрелы с фузовой платформой;жения грузовой платформы 5 относительно фиг.9 - верхнее (крайнее) положение теле-телескопической стрелы 4, в концевой вы- скопическо й стрелы с грузовой платформой.движной секции последней смонтированы
Кран-штабелер содержит горизонталь- 40опорно-направляющие желоба 22, в котоные направляющие 1 и 2, закрепленные крых посредством регулируемых прижимных
карнизу в средней части обслуживаемогоопорно-направляющих роликов 23 перемездания; на направляющих 1,2 установленащается каретка 24, жестко связанная с груходовая тележка 3 с закрепленной на незовой платформой 5 (фиг.6). В центре
телескопической стрелой 4. которая имеет 45телескопической стрелы 4 на средней ее
возможность выдвигаться как вверх, так исекции, смонтирована штанга 25, служащая
вниз по отношению к уровню креплениядля заделки свободных концов каната 6
горизонтальных направляющих 1,2 переме-подъемно-опускной грузовой платформы 5.
щения ходовой тележки 3. На стреле 4 уста Грузовая платформа 5 может оснащатьновлена подъемно-опускная грузовая 50ся смежным оборудованием: поворотным
платформа 5 (фиг. 1).контейнером для подачи длинномерных маПеремещение секций телескопическойтериалов, регулируемыми захватами для
стрелы 4 и подъемно-опускной грузовоймонтажа ограждающих конструкций и т.п.
платформы 5 осуществляется стальными ка-Кран-штабелер работает следующим
катами 6 через блоки 7, свободно вращаю- 55образом. Из исходного положения, когда тещиеся на осях 8, барабан 9, коническуюлескопическая стрела 4 и грузовая платфорзубчатую передачу 10, взаимодействующую ма 5 находятся в крайней нижней точке,
со сцепляемой управляемой двухстороннейсоответствующей приему или снятию груза
электрической муфтой 11, и привод, включа-(фиг. 1,5,7), производится вертикальный
ющий редуктор 12 с двумя выходными вала-подъем грузовой платформы 5 путем одноми и реверсивный электродвигатель 13 с дистанционным управлением. Причем электродвигатель 13 с дистанционным управлением имеет возможность через сцепляемую управляемую двухстороннюю электрическую муфту 14, взаимодействующую со звездочкой 15, посредством цепи 16 и звездочки 17, неподвижно закрепленной на оси 18 приводных колес 19 ходовой тележки 3, перемещать последнюю по гори-
лежки 3, перемещать последнюю по гори-
зонтальным направляющим 1,2 с возможными остановками в заданных точках (фиг.2,3).Ходовая тележка 3 содержит также регулируемые прижимные ролики 20, обеспечивающие плотный контакт колес тележки 3 с горизонтальными направляющими 1 и 2; а также фиксацию тележки 3, в поперечном направлении относительно направляющих 1 и 2 (фиг.3,4).
Предлагаемая компоновка привода крана-штабелера дает возможность посредством соответствующего включения муфт 11 и 14, сочетать как одновременное поднятие
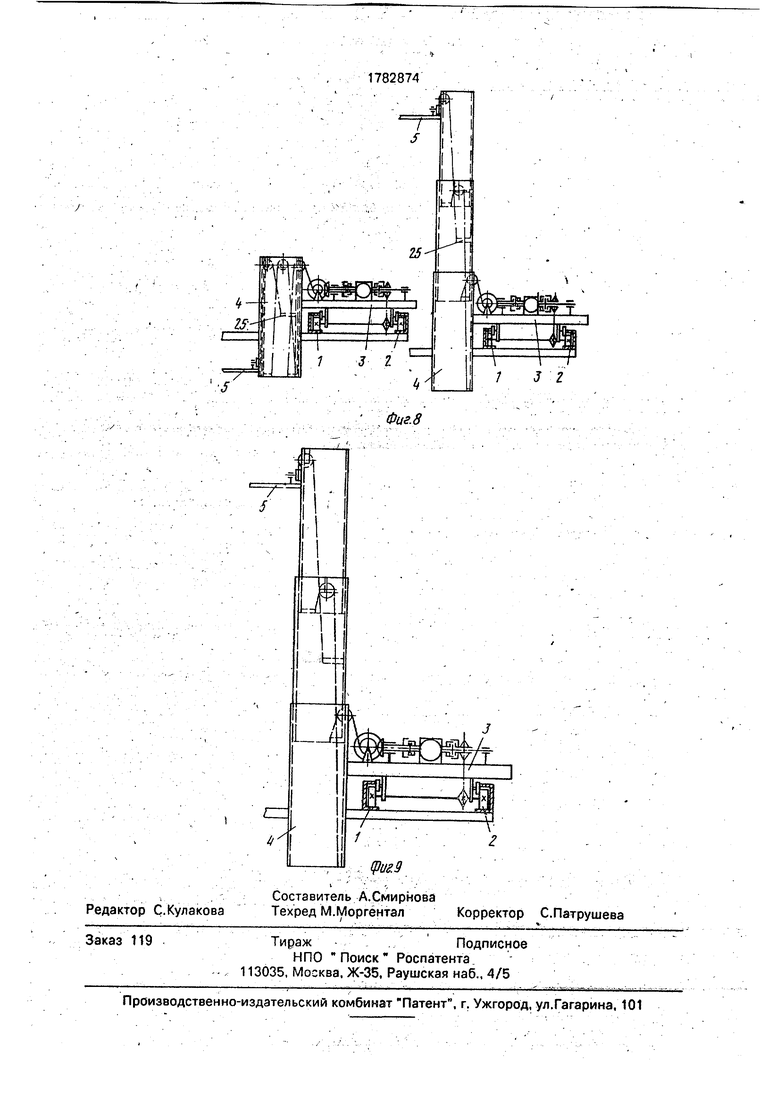
(опускание) грузовой платформы 5 вместе с телескопической стрелой 4 и перемещенивременного утапливания секций телескопической стрелы 4 друг в друга до среднего положения (фиг.8). Грузовая платформа 5 при этом остается неподвижной относительно концевой секции телескопической 5 стрелы 4. в котором она закрыта при помощи каретки 24 в желобах 22.
Далее происходит одновременное выдвижение секций телескопической стрелы 10 4, причем грузовая платформа 5 также начинает двигаться вверх по опорно-направляющему желобу 22 относительно концевой секции стр елы 4 до крайнего верхнего положения (фиг. 9).15
Опускание груза на грузовой платформе происходит в обратном порядке.
После приема груза на грузовую платформу 5 происходит подъем последней на 20 необходимую высоту, а затем горизонтальное перемещение ходовой тележки 3 до заданной точки обслуживаемого соору- keHHfl, где тележка 3 останавливается. Возможен также вариант, когда подъем (опускание) грузовой платформы 5 одновременно сочетается с горизонтальным перемещением ходовой тележки 3 до заданной точки обслуживаемого сооружения, где движения прекращаются. Такой способ 30 транспортировки позволяет сократить время доставки груза в заданную точку обслуживаемого сооружения.
Формула изобретения Кран-штабелер, содержащий ходовую тележку для перемещения по горизонтальным направляющим средней части обслуживаемого объекта, вертикальную телескопическую трехсекционную стрелу, основная секция которой жестко прикреплена средней частью к ходовой тележке, имеющую перемещаемую вдоль всех секций подъемно-опускную грузовую платформу, и механизм вертикального перемещения последней и секций стрелы, включающий в себя барабан, связанный с приводом перемещения ходовой тележки, и гибкие органы, один из которых соединен концами со средней секцией и барабаном, второй - с основной и концевой секциями, а третий связан с подъемно-опускной платформой и средней секцией, отличающи и с я тем, что, с целью упрощения конструкции, на средней секции в ее центре смонтирована штанга, третий гибкий орган механизма вертикального перемещения подъемно-опускной платформы и секций стрелы своими концами прикреплен к упомянутой штанге и размещен с огибанием закрепленных на этой платформе уравнительных блоков, а вал барабана этого механизма связан с приводом ходовой тележки посредством зубчатой передачи и размещенной на выходном валу упомянутого привода управляемой двусторонней электромуфты.
1
: --- - --- - -ЈЈр% ;;;v.: .;
б ef-iff
8
I
г/г2
6-6
vri.
/ j ;...д.
.
ОТ.
J
ff
в-е
ю с
/ /
#б«4
ВцдГ
}гЙ-15
L
21Фиё.5
I
Л
4
-2J
-ff
-27 5
6
Фиг. 7
1782874
л-л
фа&9
