1
Изобретение относится к устройствам для передачи штучных грузов в горизонтальном направлении с шагового конвейера на последующую обработку.
Известен перекладчик штучных грузов, включающий корпус, подвижную в вертикальном и горизонтальном направлениях платформу с захватом для переноса грузов на позицию дальнейшей обработки 1.
Перемещение груза на позицию дальнейшей обработки осуществляется захватом с тем же шагом, что и перемещение его подвижной платформой .к захвату.
Наиболее близким к предлагаемому по технической сущности и достигаемому результату является перекладчик штучных грузов с шагового конвейера, включающий корпус, платформу, на которой установлен с возможностью перемещения захват для переноса гру- . зов на позицию дальнейшей обработки
С увеличенным шагом и механизмы го- ризонтапьного и вертикального перемещения захвата С ЗНедостаток устройства заключается в сложности конструкции и малой надежности в работе, который связан с наличием у тележки индивидуального привода горизонтального перемещения и сложной системы упоров, рычагов и эксцентриков.
Цель изобретения - упрощение конструкции и повышение надежности работы.
Поставленная цель достигается тем, что платформа выполнена подвижной с возможностью горизонтального и вертикального перемещения, а механизм горизонтального перемещения захвата выполнен в виде реек, укрепленных на захвате, дополнительной рейки с фиксируюпцш приспособлением от горизонтального перемещения и шестерен, связанных между собой посредством вала, укрепленного на платформе.
Фиксирующее приспособление допел нительной рейки от горизонтального перемещения выполнено в виде укрепленных на корпусе вертикальных направляющих и размещенных в них роликов , которые установлены на дополнительной рейке.
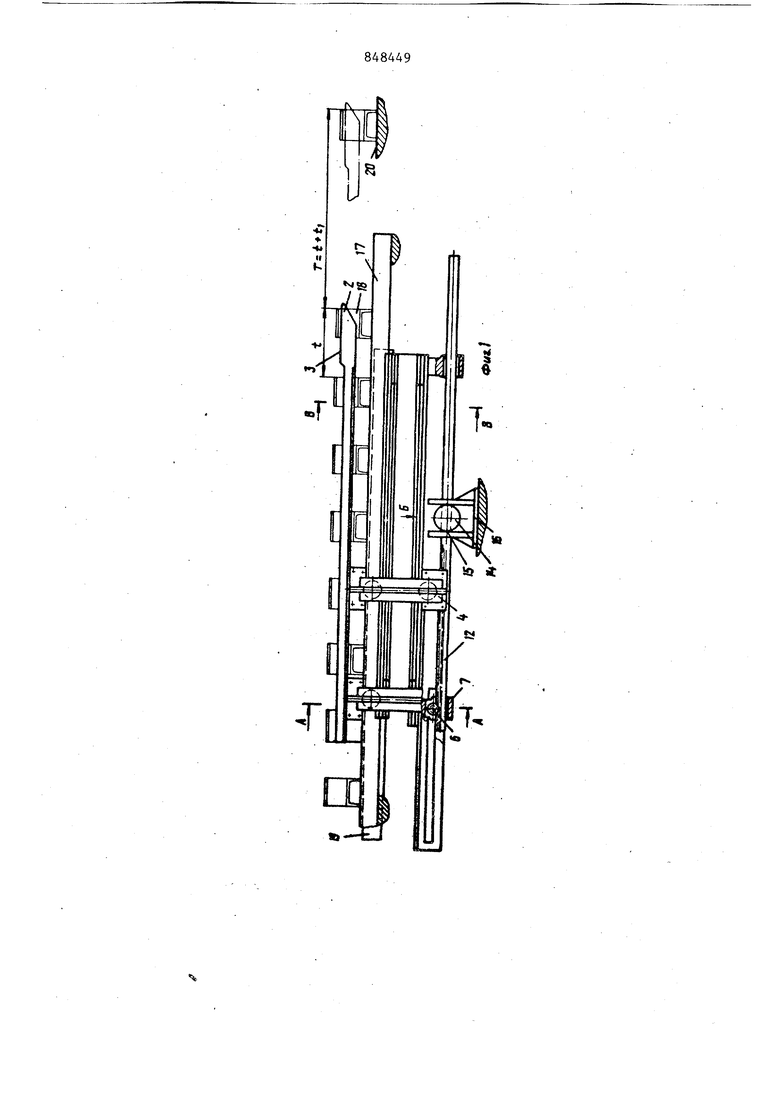
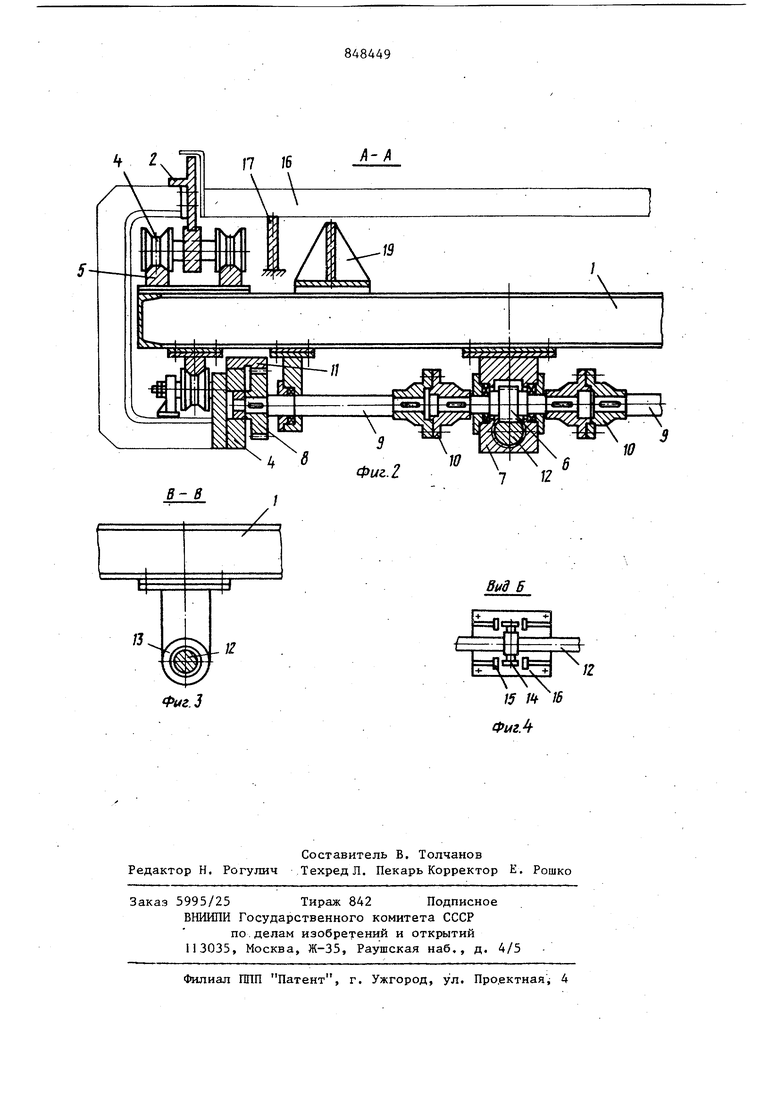
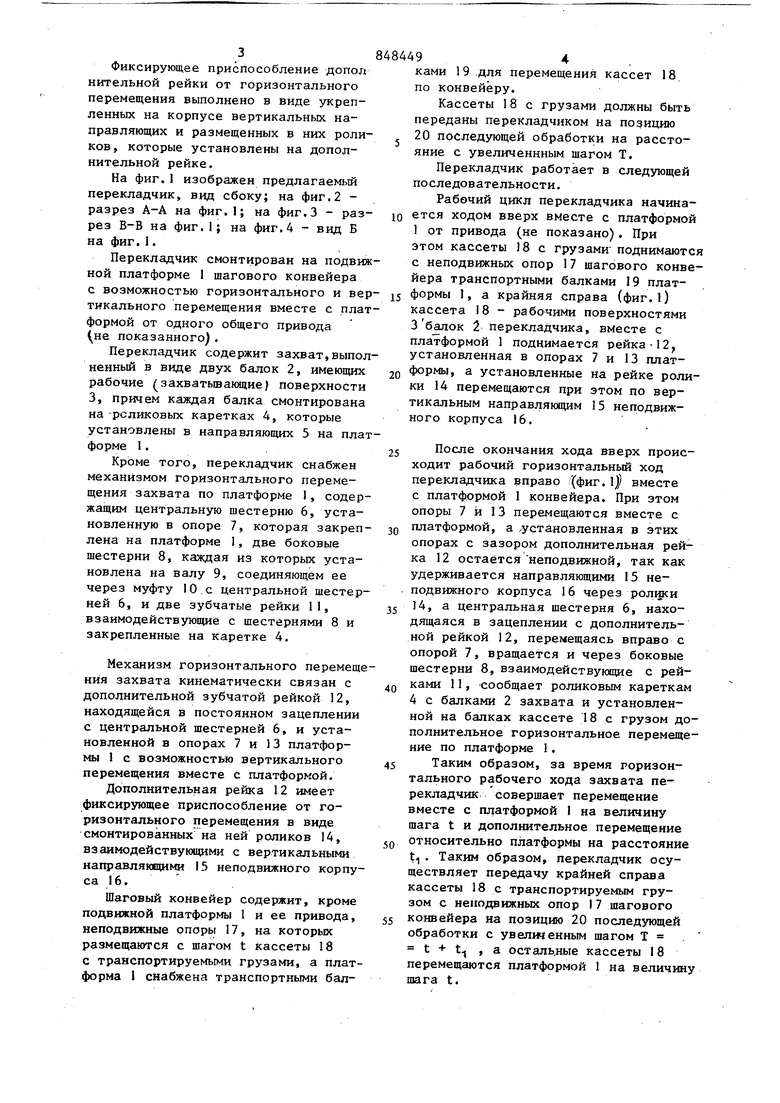
На фиг.1 изображен предлагаемый перекладчик, вид сбоку; на фиг.2 разрез А-А на фиг. 1; на фиг.З - разрез В-В на фиг.I; на фиг.4 - вид Б на фиг..
Перекладчик смонтирован на подвижной платформе 1 шагового конвейера с возможностью горизонтального и вертикального перемещения вместе с платформой от одного общего привода не показанного).
Перекладчик содержит захват,выполненный в виде двух балок 2, имеющих рабочие (захватьшакндие) поверхности 3, причем каждая балка смонтирована на -роликовых каретках 4, которые установлены в направляющих 5 на платформе 1.
Кроме того, перекладчик снабжен механизмом горизонтального перемещения захвата по платформе I, содержащим центральную шестерню 6, установленную в опоре 7, которая закреплена на платформе 1, две боковые щестерни 8, каждая из которых установлена на валу 9, соединяющем ее через муфту 10,с центральной шестерней 6, и две зубчатые рейки 11, взаимодействующие с шестернями 8 и закрепленные на каретке 4.
Механизм горизонтального перемещения захвата кинематически связан с дополнительной зубчатой рейкой 12, находящейся в постоянном зацеплении с центральной шестерней 6, и установленной в опорах 7 и 13 платформы 1 с возможностью вертикального перемещения вместе с платформой.
Дополнительная рейка 12 имеет фиксирующее приспособление от горизонтального перемещения в виде смонтированных на ней роликов 14, взаимодействующими с вертикальными направляиощми 15 неподвижного корпуса 16.
Шаговый конвейер содержит, кроме подвижной платформы 1 и ее привода, неподвижные опоры 17, на которых размещаются с шагом t кассеты 18 с транспортируемыми грузами, а платформа 1 снабжена транспортными балками 19.для перемещения кассет 18, по конвейеру.
Кассеты 18 с грузами должны быть переданы перекладчиком на позицию 20 последующей обработки на расстояние с увеличеннным шагом Т.
Перекладчик работает в следующей последовательности.
Рабочий цикл перекладчика начинается ходом вверх вместе с платформой 1 от привода (не показано). При этом кассеты 18 с грузами поднимаются с неподвижных опор 17 шагового конвейера транспортными балками 19 платформы 1, а крайняя справа (фиг.1) кассета 18 - рабочими поверхностями 3балок 2 перекладчика, вместе с платформой 1 поднимается рейка-12, установленная в опорах 7 и 13 платформы, а установленные на рейке ролики 14 перемещаются при этом по вертикальным направляющим 15 неподвижного корпуса 16.
После окончания хода вверх происходит рабочий горизонтальный ход перекладчика вправо /(фиг. Ij) вместе с платформой 1 конвейера. При этом опоры 7 и 13 перемещаются вместе с
платформой, а установленная в этих опорах с зазором дополнительная рейка 12 остаётся неподвижной, так как удерживается направляющими 15 неподвижного корпуса 16 через рол1рси
14, а центральная шестерня 6, находящаяся в зацеплении с дополнительной рейкой 12, перемещаясь вправо с опорой 7, вращается и через боковые шестерни 8, взаимодействукяцие с рейками 11, -сообщает роликовым кареткам 4 с балками 2 захвата и установленной на балках кассете 18с грузом дополнительное горизонтальное перемещение по платформе 1.
Таким образом, за время горизонтального рабочего хода захвата перекладчик совершает перемещение вместе с ацатформой I на величину шага t и дополнительное перемещение
относительно платформы на расстояние t. Таким образом, перекладчик осуществляет передачу крайней справа кассеты 18 с транспортируемым грузом с не11одвижных опор 17 шагового
конвейера на позицию 20 последующей обработки с увеличенным шагом Т t + Ц , а осталь.ные кассеты 18 перемещаются платформой 1 на величину шага t. После окончания горизонтального рабочего хода перекладчик вместе с платформой 1 и рейкой 12 совершае ход вниз, во время которого кассеты 18 с грузами устанавливаются на неподвижные опоры 17 шагового конвейе ра, а крайняя справа кассета 18 - н позицию 20 последукицей обработки Затем происходит обратный горизонтальный ход перекладчика с платформой I, во время которого все его устройства возвращаются в исходное положение. Технико-экономические преимущест предлагаемого перекладчика штучных грузов заключаются в упрощении конструкции и повьш1ении надежности по сравнению с известными устройствами подобного типа. Экономический эффект может быть йолучен за счет уменьшения стоимост изготовления перекладчика и увеличения срока службы при эксплуатации. Формула изобретения 1. Перекладчик штучных грузов с шагового конвейера, включающий корпус, платформу, на которой установлен с возможностью перемещения захв 96 для переноса грузов на позицию дальнейшей обработки с увеличенным шагом и механизмы горизонтального и вертикального перемещения захвата, отличающийся тем, что, с целью упрощения конструкции и повышения надежности работы, платформа выполнена подвижной с возможностью горизонтального и вертикального перемещения, а механизм горизонтального перемещения захвата вьтолнен в виде реек, укрепленных на захвате, дополнительной рейки с фиксирующим приспособлением от горизонтального перемещения и шестерен, связанных между собой посредством вала, укреп-г ленного на платформе. 2. Перекладчик по п.1, о т л и ч ю щ и и с я тем, что фиксирующее приспособление дополнительной рейки от горизонтального перемещения выполнено в виде укрепленных на корпусе вертикальных направляющих и размещенных в них роликов, которые установлены на дополнительной рейке. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 280318, кл. В 65 G 47/00, 1969. 2.Авторское свидетельство СССР № 606784, кл. В 65 G 47/52, 1976 (прототип).
/5 / /5
Фиг А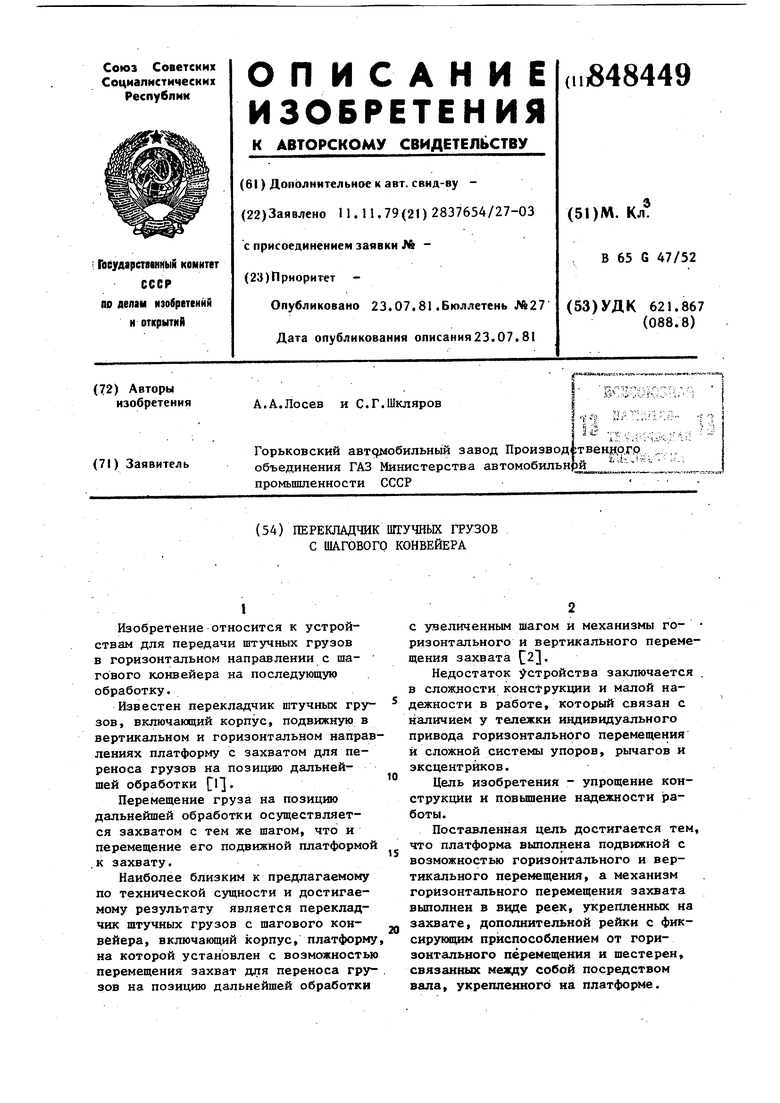
| название | год | авторы | номер документа |
|---|---|---|---|
| Шаговый конвейер для перемещенияшТучНыХ КРупНОгАбАРиТНыХ гРузОВ | 1979 |
|
SU816886A1 |
| Установка для упаковки рулонов на поддоне | 1979 |
|
SU861174A1 |
| Шаговый конвейер | 1990 |
|
SU1787880A1 |
| РОБОТИЗИРОВАННЫЙ КОМПЛЕКС ДЛЯ МНОГОПЕРЕХОДНОЙ ШТАМПОВКИ | 1993 |
|
RU2082527C1 |
| Устройство для пакетирования кольцеобразных изделий | 1983 |
|
SU1141052A1 |
| ШАГАЮЩИЙ КОНВЕЙЕР С ВЕРТИКАЛЬНОЙ ПОДАЧЕЙ ГРУЗОВ | 1992 |
|
RU2028975C1 |
| Шаговый конвейер бнч-3 | 1979 |
|
SU893743A1 |
| Сборочный участок автоматической линии | 1985 |
|
SU1283017A1 |
| Механизированный склад-накопитель штучных грузов | 1988 |
|
SU1648852A1 |
| Вертикальный накопитель для штучных грузов | 1985 |
|
SU1303504A1 |