Известные под зесные конвейеры для транспортирования длинномерных грузов содержат непрерывный тяговый орган с прикрепленными к нему подвесками, каждая пара которых соединена с платформой, оснащенной захватами для груза.
Предлагаемый конвейер отличается от известных тем, что одна из каждой лары подвесок связана с платформой жестко, а вторая снабжена в нижней части роликами, расположенными в иазу платформы, что обеспечивает транспортирование груза по сложной трассе.
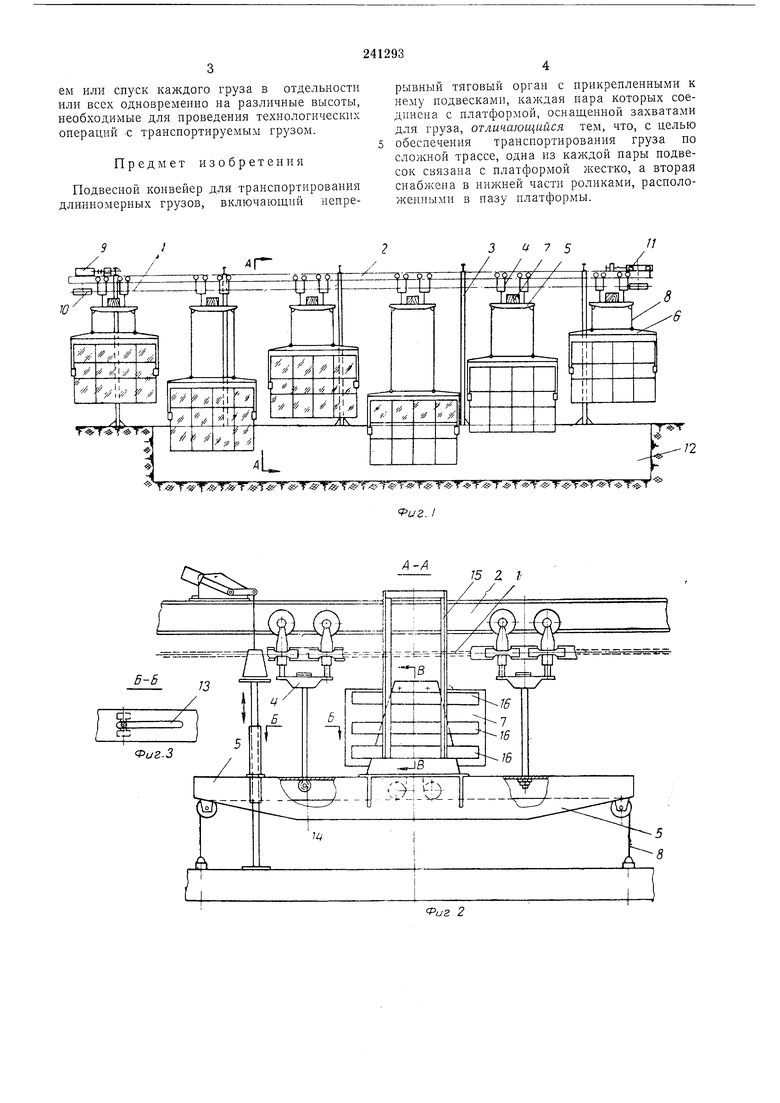
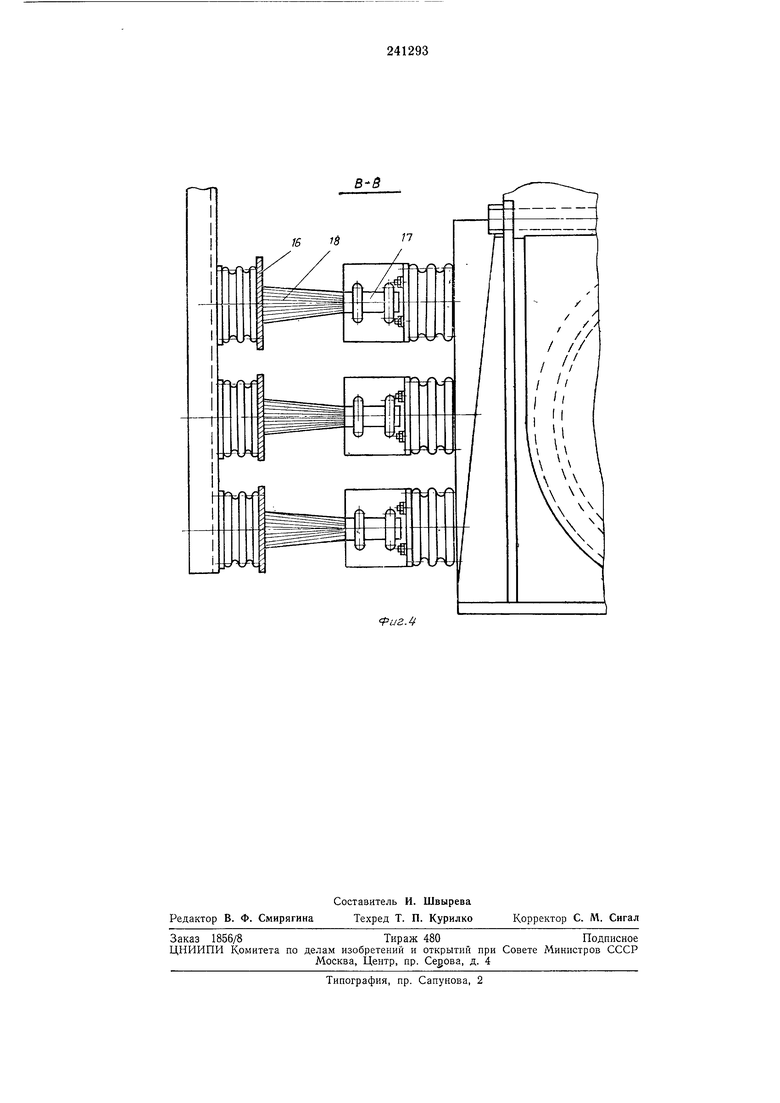
На фиг. 1 изображен предлагаемый конвейер, общий вид; на фиг. 2 - разрез по А-Л на фиг. 1; на фиг. 3 - разрез по Б-Б на фж. 2; на фиг. 4 разрез по В-В на фиг. 2.
Подвесной конвейер содерлшт тяговый орган / и монорельс 2, установленный на опорах 3. К тяговому органу прикреплены иодвески 4 с присоединенными к ним платформами 5, оснащенными захватами 6 для груза. Платформы, имеют индивидуальные лебедки 7 для подъема и опускания груза. Каждая лебедка для предотвращения проворачивания захвата с грузом относительно вертикальной оси имеет барабан (не показан) с двусторонней навивкой каната 8. К концам последнего подвешен захват 6. Тяговый орган приводится в движение от приводной станции 9 с помощью звездочки 10, а натяжение его осуществляется натяжным устройством //. По всей длине pa6o4eii ветви KOHseiiepa имеется щель 12, позволяющая опускать груз до уровня, удобного для работы.
Для прохождения на поворотах, где межцеитровое расстояние между осями нодвесок
4сокращается, в верхней части платформы
5сдел.ан паз 13 (см. фиг. 3). в котором размещаются ролики 14 одной подвсск) каждой иары. Другая подвеска это11 пары скреплена с платформой жестко.
Для управления лебедками 7 на крони1тейнах 15 устаиоз.чеиы токопередающие лыжи 16, снимается напряжение с лыж токосъемниками 17. Рабочая контактир ющая часть 18 токосъемников выполнена из отдельных проволочных элементов. Токосъемники каждой грузово .платфор:аы входят в контакт только своих токоиереда;ощих лыж /6. В засисимостп от заданной програ.ммы лебедки 7 каждой грузовой платформы получают команды от автомата пли ручного управления о спуске груза на ту или иную высоту, необходимую для проведения технологических операций пз. постах, расположенных по длине конБейера. Платформы 5 перемещаются от одного поста к другом и авто:мат 1чески останавливаются.
ем или спуск каждого груза в отдельности или всех одновременно на различные высоты, необходимые для проведения технологических операций с транспортируемым грузом.
Предмет изобретения
Подвесной конвейер для транспортирования длинномерных грузов, включаюихий непре T/ T- T«T
рывный тяговый оргаи с прикрепленными к нему подвесками, каждая пара которых соединена с платформой, оснащенной захватами для груза, отличающийся тем, что, с целью обеспечения транспортирования груза ио сложной трассе, одна из каждой пары подвесок связана с платформой жестко, а вторая снабжена в нижней части роликами, расположеиными в пазу платформы. T/; T T T T T r-«iT% T-f -T;j T T T.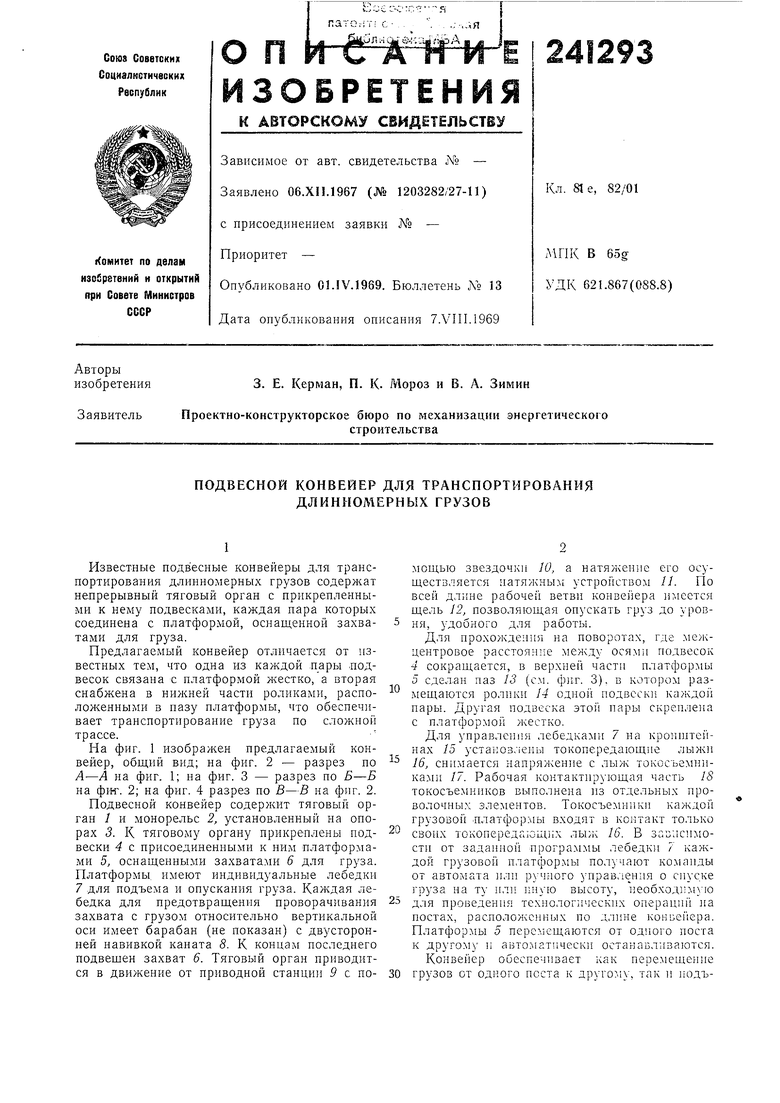
| название | год | авторы | номер документа |
|---|---|---|---|
| Подвесной конвейер для транспортировки длинномерных грузов | 1981 |
|
SU988682A1 |
| Устройство для транспортирования грузов на подвесном конвейере | 1980 |
|
SU876517A1 |
| Подвесной конвейер | 1990 |
|
SU1722978A2 |
| СПОСОБ ТРАНСПОРТИРОВКИ, ЗАГРУЗКИ И РАЗГРУЗКИ КРУПНОГАБАРИТНЫХ ГРУЗОВ В ГРУЗОВУЮ КАБИНУ САМОЛЕТА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2248308C2 |
| Устройство для накопления грузов | 1990 |
|
SU1789444A1 |
| ПОДЪЕМНИК ДЛЯ ПРЯМОЛИНЕЙНЫХ ЛЕСТНИЧНЫХ МАРШЕЙ | 2012 |
|
RU2509711C2 |
| СПОСОБ ПЕРЕМЕЩЕНИЯ ГРУЗОВ И ПОДЪЕМНО-ТРАНСПОРТНОЕ УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2078934C1 |
| Подвесной пространственный конвейер | 1973 |
|
SU472872A1 |
| Устройство для навешивания и съема грузовых подвесок с тележки толкающего конвейера | 1977 |
|
SU740641A1 |
| Подвесной конвейер | 1982 |
|
SU1102727A1 |
В-3
иг.
