Предлагаемый корректор предназначен для обработки междурядьев и устранения подрезания растений.
Известны автоматические корректоры поперечных перемещений культиватора, в которых в качестве датчика используются направляющие колеса тягового самоходного шасси, подающие сигнал через гидравлическое устройство на рабочие органы культиватора.
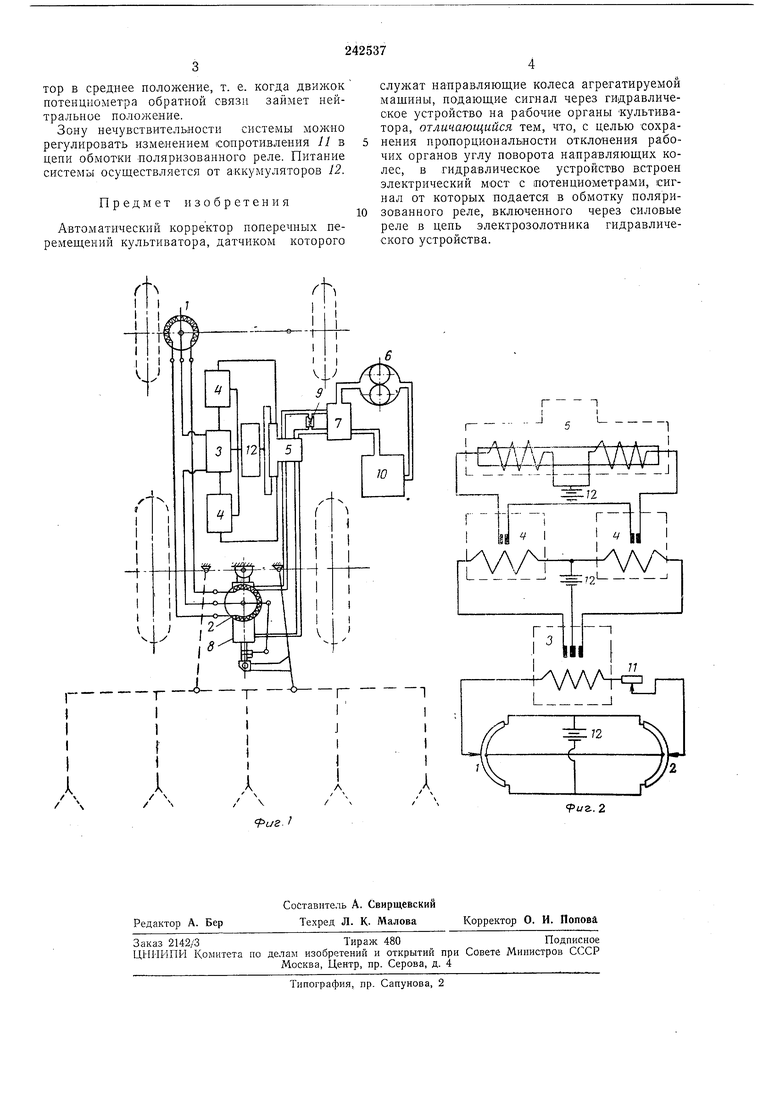
Предложенный корректор отличается от известных тем, что в гидравлическое устройство BCTpoeiH электрический мост с потенциометрами, сигнал от которых подается в обмотку поляризованного реле, включенного через силовые реле в цепь электрозолотника гидравлического устройства.
Это сохраняет пропорциональность отклонения рабочих органов углу поворота направляющих колес.
На фиг. 1 показана принципиальная схема корректора; на фит. 2 - его электрическая часть.
При повороте направляющих колес тягового самоходного ща,сси влево или вправо от среднего положения потенцио.метрический датчик 1, включенный в электрический мост с потенциометром обратной связи 2, выдает электрический сигнал того или иного направления в обмотку поляризованного реле 3. Последнее через одно из двух силовых реле 4
включает соответствующую муфту электрогидрозолотника 5. При отклонении золотника от нейтрального положения масло от насоса 6 через гидрораспределитель 7 поступает в
5 соответствующую полость гидроцилиндра 8, отклоняющего навеску шасси в горизонтальной плоскости от рядка растений.
Навеска, а следовательно, и культиватор отклоняются до тех пор, пока движок потенциометра обратной связи, связанный со штоком гидроцилиндра, не сбалансирует мост. Прн этом электрогидрозолотник занимает нейтральное положение, и доступ масла в гидроцилиндр прекращается.
5 В нейтральном положении золотника масло от насоса через редукционный клапан 9 сливается в бак 10 гидросистемы.
Таким образом, угол отклонения культиватора пропорционален углу поворота нацрав0 ляющих Колес от их среднего ноложения.
При возвращении нанравляющих колес в среднее пололсение движок потенциометрического датчика возвращается в нейтральное пололсение, и электрический мост оказывается
5 разбала.нсированным за счет пололчения движка потенциометра обратной связи. При этом в обмотку ноля ризованного реле поступает ток обратного направления, включается другое силовое реле, переключается электрогидрозотор в среднее положение, т. е. когда движок потенциометра обратной связи займет нейтральное положение.
Зону нечувствительности системы можно регулировать изменением сопротивления У/ в цепи обмотки поляризованного реле. Питание системы осуществляется от аккумуляторов 12.
Предмет изобретения
Автоматический корректор поперечных перемещений культиватора, датчиком которого
Г
/
/
служат направляющие колеса агрегатируемои мащины, подающие сигнал через гидравлическое устройство на рабочие органы -культиватора, отличающийся тем, что, с целью сохранения иролорциональности отклонения рабочих органов углу поворота направляющих колес, в гидравлическое устройство в,строен электрический мост с потенциометрами, сигнал от которых подается в обмотку иоляризоваивого реле, включенного через силовые реле в цепь электрозолотника гидравлического устройства.
I
-+AAA/4-iEj-1
I
9i/a. 2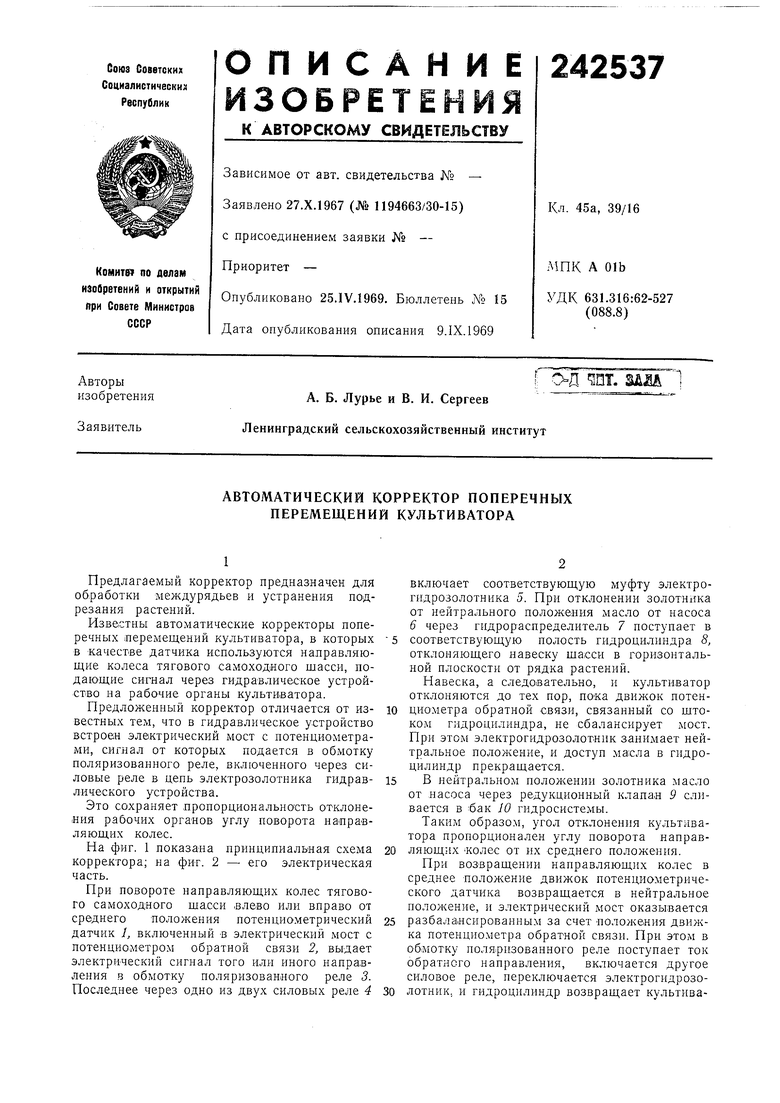
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство автоматического регулирования давления жидкости в тормозах авиаколес | 1960 |
|
SU145140A1 |
| Устройство для коррекции положения рабочих органов культиватора | 1988 |
|
SU1605954A1 |
| Автоматическое устройство для управления самоходным пахотным агрегатом | 1958 |
|
SU120415A1 |
| Устройство для автоматического управления механизмами машин-орудий | 1937 |
|
SU55814A1 |
| Подметально-уборочная машина | 1980 |
|
SU977547A1 |
| МАЛОГАБАРИТНЫЙ ЭЛЕКТРОПОГРУЗЧИК | 2012 |
|
RU2539442C2 |
| Устройство для управления положением платформы транспортного средства | 1978 |
|
SU783057A1 |
| Стенд для диагностики рулевых приводов транспортных средств | 1989 |
|
SU1651133A1 |
| Способ управления движением колесных тракторов и устройство для его осуществления | 1978 |
|
SU782730A1 |
| Система рулевого управления транспортного средства | 1983 |
|
SU1133157A1 |
