Изобретение относится к устройствам электрических силовых приводов самолетного оборудования и может быть использовано в аналогичных устройствах общего назначения.
В системах автоматического управления широко используется электрический силовой привод со скоростной обратной связью. В целом ряде случаев к силовому приводу предъявляются высокие требования по статической точности и плавности включения его в работу. Примером применения такого электрического привода, где требования статической точности и плавности включения являются особо важными, может служить электрический силовой привод автопилота для автоматической стабилизации и управления самолетом.
Плавность включения в известных устройствах осуществляется с помощью блока центрирования, выполненного в виде потенциометрической следящей системы и включаемого в работу перед включением автопилота. Применение блока центрирования существенно усложняет устройство привода, увеличивает его вес и снижает надел ность.
тически связан с ведомой частью электромагнитной муфты, а щетка - с ведущей ее частью. Кроме того, щетка потенциометра электрически подключена к суммирующему
входу усилителя.
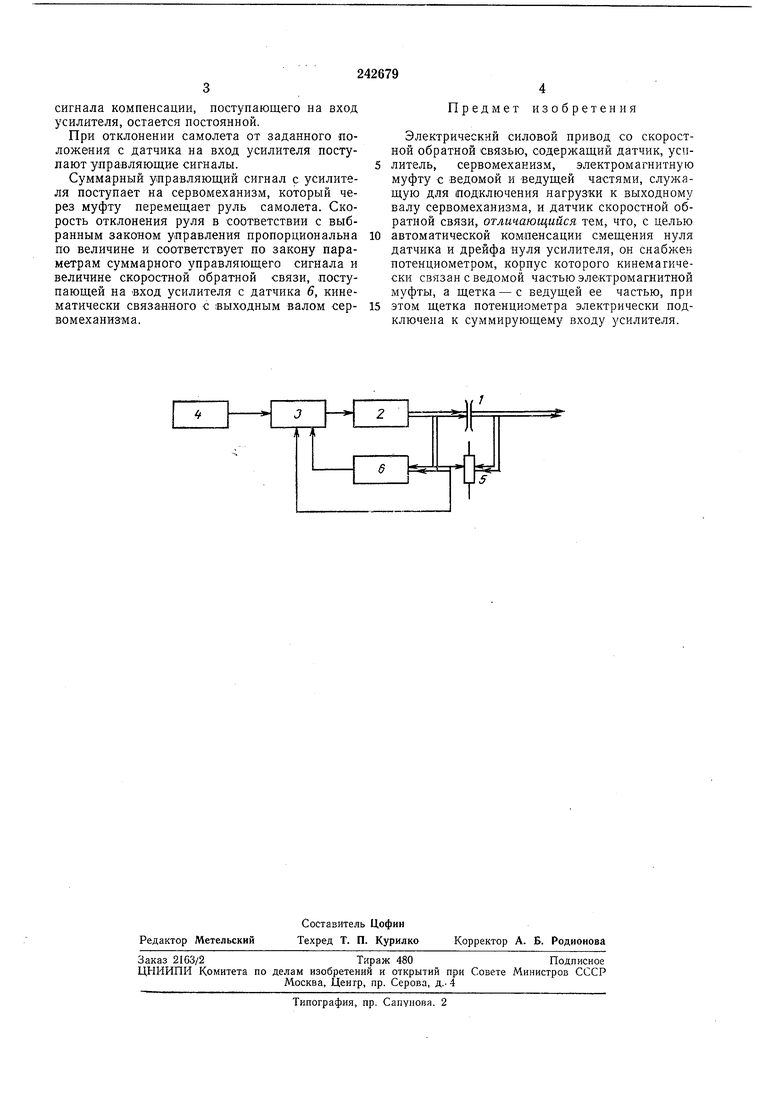
Структурная схема предлагаемого устройства изображена на чертеже.
В исходном положении, т. е. когда автопилот не включен, электромагнитная муфта /
отключена и сервомеханизм 2 кинематически не связан с нагрузкой, например рулем самолета. Па вход усилителя 3 с датчика 4 поступают управляющие сигналы. Под действием этих сигналов, а также сигналов смещения нулей усилителя и сервомеханизма выходной элемент сервомеханизма перемещает щетку потенциометра 5. Перемещение выходного элемента сервомеханизма прекращается, когда сигнал с датчика рассогласования скомпенсирует суммарный сигнал с чувствительных элементов автопилота.
По окончании процесса балансировки силовой привод канала автопилота может быть
включен, для чего необходимо включить электромагнитную муфту. Движение выходного элемента сервомеханизма передается на руль самолета. При включении электромагнитной муфты фиксируется положение щетки потенсигнала компенсации, поступающего на вход усилителя, остается постоянной.
При отклонении самолета от заданного положения с датчика на вход усилителя поступают управляющие сигналы.
Суммарный управляющий сигнал с усилителя поступает на сервомеханизм, который через муфту перемещает руль самолета. Скорость отклонения руля в соответствии с выбранным законом управления пропорциональна по величине и соответствует по закону параметрам суммарного управляющего сигнала и величине скоростной обратной связи, поступающей на вход усилителя с датчика 6, кинематически связанного с выходным валом сервомеханизма.
Предмет изобретения
Электрический силовой привод со скоростной обратной связью, содержащий датчик, усплитель, сервомеханизм, электромагнитную муфту с ведомой и ведущей частями, служащую для подключения нагрузки к выходному валу сервомеханизма, и датчик скоростной обратной связи, отличающийся тем, что, с целью
автоматической компенсации смещения нуля датчика и дрейфа нуля усилителя, он снабжен потенциометром, корпус которого кинемагически связан с ведомой частью электромагнитной муфты, а щетка - с ведущей ее частью, при
этом щетка потенциометра электрически подключена к суммирующему входу усилителя.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического контроля неисправностей автопилота | 1964 |
|
SU205572A1 |
| Устройство для управления поворотом передней стойки шасси самолета | 1957 |
|
SU111467A1 |
| АВТОПИЛОТ ДЛЯ САМОЛЕТОВ МАЛОЙ АВИАЦИИ | 2024 |
|
RU2832351C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ УГЛОМ ТАНГАЖА И ОГРАНИЧЕНИЯ УГЛА АТАКИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2010 |
|
RU2434785C1 |
| Устройство для автоматического контроля неисправностей автопилота | 1969 |
|
SU333818A1 |
| СИСТЕМА УПРАВЛЕНИЯ СНАРЯДАМИ | 2002 |
|
RU2218540C2 |
| СПОСОБ ПРОВЕРКИ КАЧЕСТВА ФУНКЦИОНИРОВАНИЯ РУЛЕВЫХ ПРИВОДОВ И АВТОПИЛОТОВ УПРАВЛЯЕМЫХ СНАРЯДОВ И СТЕНД ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2182702C2 |
| АВТОКОЛЕБАТЕЛЬНЫЙ АВТОПИЛОТ УПРАВЛЯЕМОГО СНАРЯДА | 1996 |
|
RU2115086C1 |
| РЕЛЕЙНЫЙ ПНЕВМО-ГИДРОПРИВОД С ВИБРАЦИОННОЙ ЛИНЕАРИЗАЦИЕЙ СИСТЕМ УПРАВЛЕНИЯ РАКЕТ И УСТАНОВОК ВООРУЖЕНИЯ | 2003 |
|
RU2243491C1 |
| Устройство для автоматического отключения автопилота | 1961 |
|
SU146185A1 |
