Изобретение относится к оборонной технике и, в частности, к средствам борьбы с малоразмерными целями и может быть использовано в системах управления снарядами, формирующих на борту команды управления движением.
Известна система управления снарядами [1], содержащая аппаратуру формирования команд наведения снаряда на цель, расположенную на пункте управления, а на снаряде последовательно соединенные приемник, двухканальную аппаратуру разделения каналов и декодирования и автопилот, состоящий из усилителя-преобразователя, выход которого подключен к силовому приводу, при этом силовой привод выполнен как сумматор, выход которого через усилитель постоянного тока (УПТ) соединен с обмоткой управления рулевого механизма, кинематически связанного с потенциометром обратной связи, выход (движок) которого подключен через усилитель обратной связи ко второму входу сумматора.
В состав аппаратуры разделения каналов и декодирования входит триггер, амплитуда сигнала на выходе которого, а значит, и на выходе самой аппаратуры, прямо пропорциональна величине источника питания (без учета падения напряжения на активном элементе, например, напряжения насыщения на транзисторе), что эквивалентно умножению величины сигнала в обоих каналах по выходу аппаратуры на величину источника питания Е.
Потенциометр обратной связи выполнен в виде проволочного потенциометра, запитываемого (два крайних вывода) от источника питания, сигнал с которого снимается движком относительно среднего (от середины) вывода, при этом движок потенциометра кинематически связан с рулевым механизмом. Величина амплитуды сигнала на выходе потенциометра обратной связи, а значит, и на втором входе сумматора прямо пропорциональна величине угла отклонения рулей δн и величине напряжения источника питания Е, запитывающего потенциометр обратной связи.
Коэффициент передачи в автопилоте, определяемый как отношение выходной величины ко входной, согласно [2]
где W1 - коэффициент передачи в прямой цепи,
W2 - коэффициент передачи в цепи обратной связи.
Поскольку W1>>1, то Wк≈1/W2 (2).
Величина коэффициента W2 определяется произведением коэффициентов передачи потенциометра, который прямо пропорционален величине напряжения источника питания, и усилителя обратной связи, являющего УПТ. Следовательно, коэффициент передачи автопилота обратно пропорционален величине напряжения питания (без учета напряжения смещения в усилителе обратной связи), а коэффициент передачи в аппаратуре разделения сигналов и декодирования прямо пропорционален (без учета напряжения насыщения на транзисторе). Таким образом, сквозной коэффициент передачи на снаряде (Wс), равный произведению коэффициентов передачи приемного тракта (Wп) и автопилота (Wк)
Wс=Wп•Wк≈Wп/W2 (3)
полностью не компенсирует влияние изменения величины источника питания.
Таким образом, недостатком известного устройства является ошибка отработки автопилотом величин команд наведения снаряда на цель из-за неполной компенсации сквозного коэффициента передачи снаряда при изменении величины напряжения источника питания.
Задачей настоящего изобретения является повышение стабильности коэффициента передачи системы управления снарядами за счет полной взаимной компенсации нестабильностей в аппаратуре разделения каналов и декодирования и автопилоте при запитке их от нестабилизированного источника питания.
Поставленная задача решается за счет того, что в систему управления снарядами, содержащую аппаратуру формирования команд наведения снаряда на цель, расположенную на пункте управления, а на снаряде последовательно соединенные приемник и аппаратуру разделения каналов и декодирования, выходы по тангажу и курсу которой через первый и второй блоки перемножения соответственно подключены к первому и второму входам преобразователя команд, а также рулевой канал управления, в который входят сумматор, потенциометр обратной связи и обмотка управления рулевого механизма, кинематически связанного с движком потенциометра обратной связи, при этом первый вход сумматора подключен к выходу преобразователя команд, вторые входы обоих блоков перемножения и первый вывод потенциометра обратной связи соединены вместе и подключены к источнику питания, введены второй источник питания, а в рулевой канал управления - два ключевых усилителя мощности, вторая обмотка управления рулевого механизма, а также последовательно соединенные корректирующий фильтр, триггер Шмидта и инвертор, при этом вход первого ключевого усилителя мощности подключен к выходу триггера Шмидта, вход второго ключевого усилителя мощности соединен с выходом инвертора, выходы первого и второго ключевых усилителей мощности подключены соответственно к первой и второй обмоткам управления, а второй вход сумматора соединен с выходом (движком) потенциометра обратной связи, причем второй вывод потенциометра обратной связи соединен со вторым источником питания, а сами источники питания выполнены в виде двух разнополярных батарей, вторые выводы которых объединены и соединены с общим выводом, при этом сами батареи имеют идентичные характеристики.
Система управления снарядами, отличающаяся от изложенной тем, что в снаряд введен второй рулевой канал управления идентичный первому, при этом во втором канале первый вход сумматора подключен ко второму выходу преобразователя команд, а первый и второй выводы потенциометра обратной связи подключены соответственно к первым выводам первого и второго источников питания.
На фиг. 1 приведена структурная электрическая схема системы управления снарядами с одним рулевым каналом управления. На фиг.2 приведена структурная электрическая схема системы управления снарядами с двумя рулевыми каналами управления.
На фиг.1 и 2 представлены: 1 - аппаратура формирования команд наведения, расположенная на пункте управления, 2 - снаряд, 3 - приемник, 4 - аппаратура разделения каналов и декодирования, 5а и 5б - первый и второй блоки перемножения, 6 - преобразователь команд, 7а и 7б - первый и второй рулевые каналы управления, 8 - сумматор, 9 - корректирующий фильтр, 10 - триггер Шмидта, 11 - инвертор, 12а и 12б - первый и второй ключевые усилители мощности, 13 - потенциометрический датчик обратной связи, 14а и 14б - первая и вторая обмотки управления рулевым механизмом.
В заявленной системе управления снарядами аппаратура формирования команд 1, расположенная на пункте управления, связана электромагнитным излучением (радиоканал или оптический каналы связи) со снарядом, на котором (фиг.1) последовательно соединены приемник 3 и аппаратура разделения каналов и декодирования 4, выходы по тангажу "Y" и курсу "Z" которой через первый 5а и второй 5б блоки перемножения соответственно подключены к первому и второму входам преобразователя команд 6. Выход преобразователя команд 6 подключен к рулевому каналу управления 7а, а именно к первому входу сумматора 8. При этом в рулевом канале управления 7а последовательно соединены сумматор 8, корректирующий фильтр 9, триггер Шмидта 10, первый ключевой усилитель мощности 12а и обмотка управления рулевого механизма 14а, а также инвертор 11, выход которого через второй ключевой усилитель мощности 12б соединен со второй обмоткой управления рулевым механизмом 14б. Рулевой механизм (на фиг. не показан) кинематически связан с движком потенциометра обратной связи 13. Вход инвертора 11 подключен к выходу триггера Шмидта 10, а движок потенциометра обратной связи 13 подключен ко второму входу сумматора 8. Вторые входы блоков перемножения 5а и 5б объединены и подключены к первому источнику питания Е1, к нему же - первый вывод потенциометра обратной связи 13. Второй вывод потенциометра обратной связи 13 соединен со вторым источником питания Е2. Источники питания Е1 и Е2 выполнены в виде двух разнополярных батарей с идентичными характеристиками, вторые выводы которых объединены вместе и подключены к общему выводу.
В заявленной системе управления снарядами (фиг.2) в снаряд дополнительно введен второй рулевой канал управления 7б, идентичный первому 7а (приведенному на фиг.1), при этом во втором канале первый вход сумматора 8 подключен ко второму выходу преобразователя команд 6, а первый и второй выводы потенциометра обратной связи 13 подключены соответственно к первому и второму источникам питания Е1 и Е2.
Аппаратура формирования команд 1, приемник 3 и аппаратура разделения каналов и декодирования 4 могут быть выполнены, например, как в известном устройстве [1] . Блоки перемножения 5а и 5б могут быть выполнены, например в случае выполнения аппаратуры 4 на цифровых элементах, как умножающие цифроаналоговые преобразователи [3] при использовании в качестве источника опорного напряжения источника Е1 (подключенного через резисторный делитель напряжения).
Преобразователь команд 6 может быть выполнен, например, как в известном устройстве преобразователь-усилитель, включающем в себя устройство формирования команд, разностное звено и датчики.
Двухвходовой сумматор 8, триггер Шмидта 10, инвертор 11, первый и второй ключевые усилители мощности 12а и 12б выполнены как обыкновенные узлы, широко применяемые по своему прямому назначению. Корректирующий фильтр 9 выполнен как интегро-дифференцирующее звено, например, второго порядка. Обмотки управления 14а и 14б могут быть выполнены как обмотки двух электромагнитов - элементов пневматического усилителя рулевого механизма [2]. Потенциометр обратной связи 13, как в известном устройстве, но без среднего (соединенного с корпусом) вывода. Е1 и Е2 - две, например, термобатареи, выполненные в одном корпусе и имеющие идентичные характеристики.
Система управления снарядами работает следующим образом. Приемник 3 принимает электромагнитное излучение, передаваемое аппаратурой формирования команд 1 с пункта управления, например, сигнал с времяимпульсной модуляцией поднесущего колебания и амплитудной модуляцией несущего (BИM-AM).
Этот сигнал преобразуется по частоте, усиливается, поддерживается автоматической регулировкой усиления постоянным по амплитуде, демодулируется и далее импульсы, например, с ВИМ, в аппаратуре разделения каналов и декодирования 4 распределяются по двум каналам (тангаж и курс) и декодируются. Сигналы из каналов тангажа "Y" и курса "Z" поступают на блок перемножения 5а и 5б соответственно, где они умножаются на величину напряжения источника питания Е1.
Таким образом, величина постоянного (медленно меняющегося) напряжения на выходе блоков перемножения 5а и 5б прямо пропорциональна величине команд и величине напряжения Е1.
Сигналы с выхода блоков перемножения 5а и 5б, несущие информацию о величине команд управления в декартовой системе координат пункта управления "YОZ", поступают соответственно на два входа (по тангажу и курсу) преобразователя команд 6, который с помощью интегро-дифференцирующих звеньев формирует заданные динамические свойства системы управления, с помощью гироскопического датчика крена (вращения) и сумматора преобразует команды по тангажу и курсу в систему координат снаряда, например, вращающегося по крену, приводя их к виду, удобному для работы рулевого привода одноканального (фиг. 1) либо двухканального (фиг.2).
Сигнал с выхода преобразователя команд 6 поступает на сумматор 8, где он суммируется с сигналом потенциометра обратной связи, а затем поступает на корректирующий фильтр 9, который корректирует динамические свойства рулевого привода.
Таким образом, суммарный сигнал (сигнал ошибки) с выхода сумматора 8 через корректирующий фильтр 9 поступает на вход триггера Шмидта 10. Триггер Шмидта 10 [4] по сути компаратор с обратной положительной связью, формирующий уровни срабатывания (Uср) и отпускания (Uотп), симметричные относительно нуля, вырабатывает импульсы прямоугольной формы, частота которых определяется частотой автоколебаний, а длительность импульсов величиной сигнала ошибки.
Сигнал с выхода триггера Шмидта 10, например, положительной полярности поступает на первый ключевой усилитель мощности 12а и в противофазе (через инвертор 11) на второй ключевой усилитель мощности 12б. Усилители 12а и 12б поочередно подключают к источнику напряжения обмотки управления 14а и 14б соответственно, которые управляют рулевым механизмом, а значит, и рулями снаряда. В одноканальном исполнении рулевого управления (фиг.1) управление снарядом создается одной парой рулей. В двухканальном исполнении рулевого управления (фиг.2) управление создается двумя парами рулей, при этом сигнал на входе сумматора 8 во втором канале 7б подается со второго выхода преобразователя команд 6.
Таким образом, как следует из изложенного, в заявленной системе управления коэффициент передачи в автопилоте, определяемый цепью обратной связи (см. выражение 2), при изменении напряжения питания обратно пропорционален этому изменению, а в аппаратуре разделения каналов и декодирования в каждом канале (определяется блоком перемножения в каждом канале) прямо пропорционален этому изменению. Следовательно, эти два коэффициента при величине |E1| = |E2| = var полностью скомпенсирует свою нестабильность (см. выражение 3).
Введение в систему управления снарядами в рулевой канал управления двух ключевых усилителей мощности, второй обмотки управления рулевого механизма, корректирующего фильтра, триггера Шмидта, инвертора и второго источника питания, характеристики которого идентичны первому источнику питания, повысило точность системы управления за счет того, что полностью ликвидирована нестабильность коэффициента передачи снаряда при изменении величины напряжения источника питания, что позволяет запитывать аппаратуру снаряда от нестабилизированных источников питания.
Источники информации
1. Основы радиоуправления. / Под ред.В.А.Вейцеля и В.Н.Типугина. - М.: Советское радио, 1973, с. 43, 44. рис.1.20, 1.21; с.49-51, рис.1.27, 1.28; с.241-243, рис.4.24; с.247-248, рис.4.28.
2. H.Н.Иващенко. Автоматическое регулирование. Теория и элементы систем . - М.: Машиностроение, 1973, с.208, рис.IХ.10; с.210, с.157, рис.VI.27.
3. Б.Г.Федорков, В.А.Телец. Микросхемы ЦАП и АЦП: функционирование, параметры, применение. - М.: Энергоатомиздат, 1990, с.48, 49, рис.2.1; с.58.
4. У.Титце, К.Шенк. Полупроводниковая схемотехника. - М.: Мир, 1983, с. 286-289.

Изобретение относится к оборонной технике и, в частности, к средствам борьбы с малоразмерными целями и может быть использовано в системах управления снарядами, формирующих на борту команды управления движением. Технический результат - повышение точности управления. Система управления снарядами содержит аппаратуру формирования команд наведения снаряда на цель, расположенную на пункте управления, а на снаряде последовательно соединенные приемник и аппаратуру разделения каналов и декодирования, выходы по тангажу и курсу которой через первый и второй блоки перемножения соответственно подключены к первому и второму входам преобразователя команд, а также рулевой канал управления, в который входят сумматор, потенциометр обратной связи и обмотка управления рулевого механизма, кинематически связанного с движком потенциометра обратной связи. При этом первый вход сумматора подключен к выходу преобразователя команд, вторые входы обоих блоков перемножения и первый вывод потенциометра обратной связи соединены вместе и подключены к источнику питания. В систему управления снарядами в рулевой канал управления введены два ключевых усилителя мощности, вторая обмотка управления рулевого механизма, корректирующий фильтр, триггер Шмидта, инвертор и второй источник питания, характеристики которого идентичны первому источнику питания. Это повысило точность системы управления за счет того, что полностью ликвидирована нестабильность коэффициента передачи снаряда при изменении величины напряжения источника питания, что позволяет запитывать аппаратуру снаряда от нестабилизированных источников питания, при этом отсутствует ошибка управления, обусловленная дрейфом уровня постоянного напряжения в автопилоте. 1 з. п.ф-лы, 2 ил.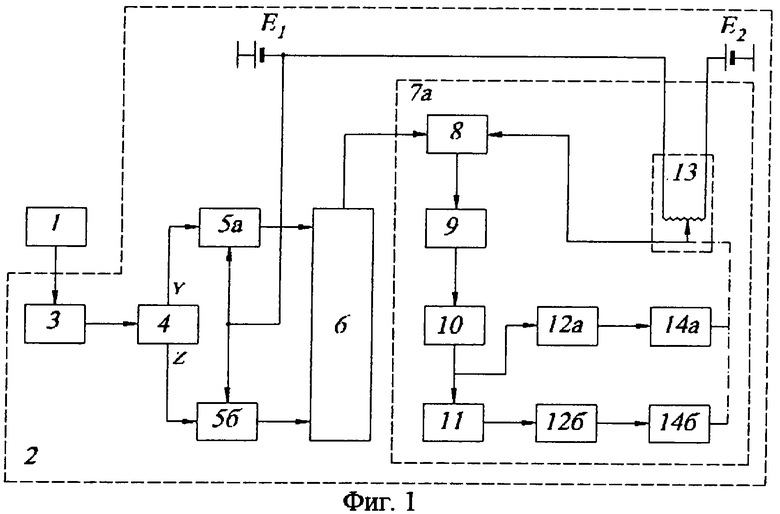
| Вейцель В.А., Типугин В.Н | |||
| Основы радиоуправления | |||
| - М.: Советское радио, 1973, с.48-51, 246-249 | |||
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 1998 |
|
RU2138768C1 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ ПОЛЕТОМ САМОНАВОДЯЩЕЙСЯ РАКЕТЫ КЛАССА ВОЗДУХ - ПОВЕРХНОСТЬ | 1997 |
|
RU2111439C1 |
| US 5042742, 27.08.1991 | |||
| СПОСОБ ПОВЫШЕНИЯ ПРОДУКТИВНОСТИ МОЛОДНЯКА КРОЛИКОВ | 2018 |
|
RU2694626C1 |

