Известны системы управления рабочими органами путевых и строительных машин, содержащие гидравлический или пневматический привод рабочих органов с золотниками или распределительными кранами, управляемыми вручную.
Описываемая система отличается от известных тем, что имеет рельс-копир, размеш.енный параллельно оси пути в необходимом положении соответственно заданной программе. На рельс-копир опирается через ролик наружный конец жидкостного уровня, внутренний конец которого связан с рабочим органом машины. На рабочем органе установлен второй жидкостной уровень, положение которого относительно рабочего органа изменяется с помощью задающего устройства по определенной программе в зависимости от упоров, расположенных на рельс-копире. Положение рабочего органа и связанного с ним жидкостного, уровня изменяется посредством электропривода, например, соленоидов, включенных в электрическую цепь с контактами жидкостных уровней, и замыкателя, управляющего задающим устройством.
Такое выполнение системы обеспечивает автоматическое управление рабочими органами мащины.
машине для планировки балласта.
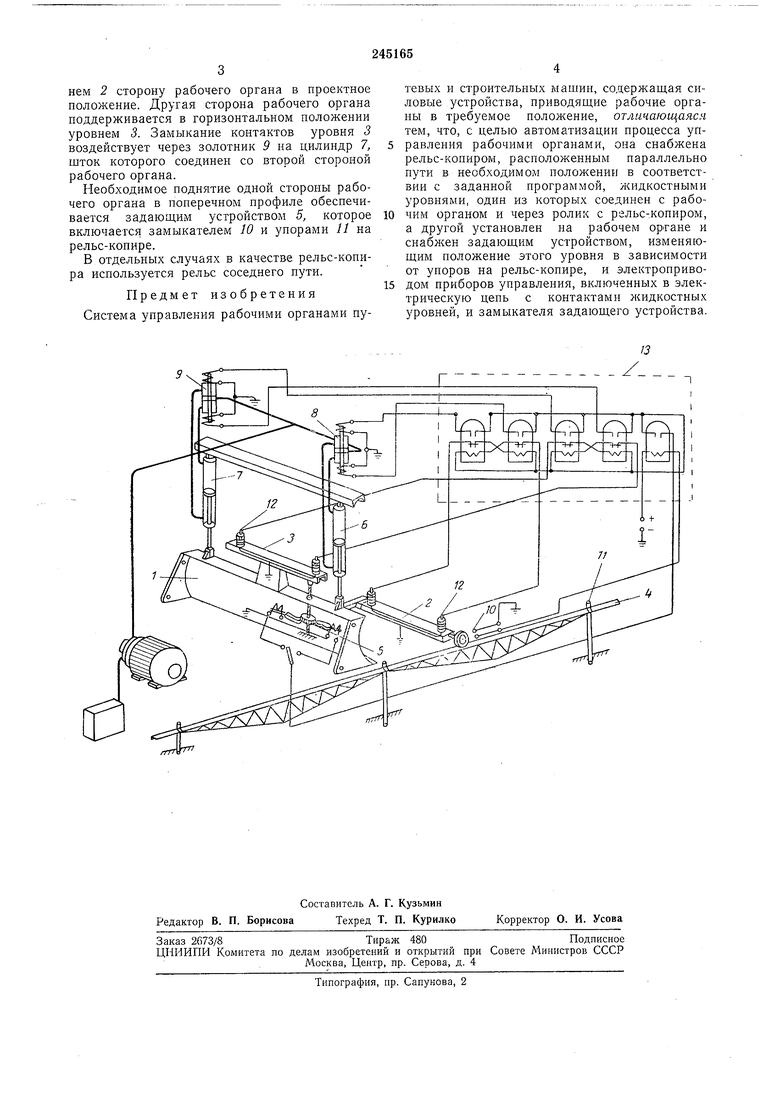
На рабочем органе 1 машины, например на ноже планировщика, установлены жидкостные уровни 2, 3. Уровень 2, контролирующий продольный профиль, связан через ролик с рельскопиром 4. Уровень 3, служащий для контроля поперечного профиля, может изменять свое положение относительно рабочего органа с помощью задающего устройства 5. Положение
рабочего органа 1 устанавливается гпдроцилиндрами 6, 7, которые управляются электрогидравлическими золотниками 8, 9. На уровне 2 смонтирован замыкатель 10, приводимый в действие от упоров П, расположенных через
определенное расстояние на рельс-копире 4.
Каждый уровень состоит из двух сообщающихся сосудов, наполненных жидкостью или ртутью. В каждом сосуде поплавок с контактами V2, включенными в электрическую цепь управления через усилители блока управления 13.
Рельс-копир 4 устанавливается вдоль рабочего участка пути по заданным проектным отметкам. При движении машины вдоль рельсконира рабочий орган / вследствие неровностей может отклоняться от заданного положения, при этом замыкается один из контактов /2 уровня 2. Ток в цепи управления автоматически включает золотник 8 цилиндра в,
нем 2 сторону рабочего органа в проектное положение. Другая сторона рабочего органа ноддерживается в горизонтальном положении уровнем 5. Замыкание контактов уровня 5 воздействует через золотник 9 на цилиндр 7, шток которого соединен со второй стороной рабочего органа.
Необходимое поднятие одной стороны рабочего органа в поперечном профиле обеспечивается задающим устройством 5, которое включается замыкателем 10 и упорами 11 на рельс-копире.
В отдельных случаях в качестве рельс-копира используется рельс соседнего пути.
Предмет изобретения Система управления рабочими органами путевых и строительных машин, содержащая силовые устройства, приводящие рабочие органы в требуемое пололсение, отличающаяся тем, что, с целью автоматизации процесса управления рабочими органами, она снабжена рельс-копиром, расположенным параллельно пути в необходимом положении в соответствии с заданной программой, жидкостными уровнями, один из которых соединен с рабочим органом и через ролик с рельс-копиром, а другой установлен на рабочем органе и снабжен задающим устройством, изменяющим положение этого уровня в зависимости от упоров на рельс-копире, и электроприводом приборов управления, включенных в электрическую цепь с контактами жидкостных уровней, и замыкателя задающего устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| Путевая машина | 1971 |
|
SU667622A1 |
| Устройство для транспортирования пассажиров с одного уровня на другой | 1978 |
|
SU783175A1 |
| Устройство управления исполнительным органом путевой машины | 1974 |
|
SU523972A1 |
| СПОСОБ ПОСТАНОВКИ ВЫПРАВЛЯЕМОГО ЖЕЛЕЗНОДОРОЖНОГО ПУТИ В ТРЕБУЕМОЕ ПОЛОЖЕНИЕ | 1969 |
|
SU253093A1 |
| УГОЛЬНЫЙ СТРУГ | 1970 |
|
SU271464A1 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ ЗОЛОТНИКАМИ ГИДРОРАСПРЕДЕЛИТЕЛЯ СКРЕПЕРА | 1968 |
|
SU219665A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ДЕФОРМАЦИИ РЕЛЬСОВ В ВЕРТИКАЛЬНОЙ ПЛОСКОСТИ | 1998 |
|
RU2143359C1 |
| Приспособление к путевым машинам для автоматического управления их рабочими органами | 1957 |
|
SU110473A1 |
| МАШИНА ДЛЯ УКЛАДКИ ОБЪЕМНОЙ ГЕОРЕШЕТКИ | 2012 |
|
RU2521171C2 |
| СИСТЕМА УПРАВЛЕНИЯ РАБОЧИМ ОРГАНОМ ПУТЕВОЙ МАШИНЫ ДЛЯ УПЛОТНЕНИЯ БАЛЛАСТА | 1973 |
|
SU376515A1 |
